Log on Nov. 16th, 2018
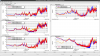
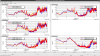
= Calibration =
-- Following same manner with klog6998, geophones in the below were calibrated. (Actually I did not uploaded the calibration results about the geophones for SR3 suspension which had done in this July..)
-- the parameters obtained by this calibration business are summarized in the below.
-- Details on the calibration plots will be followed soon.
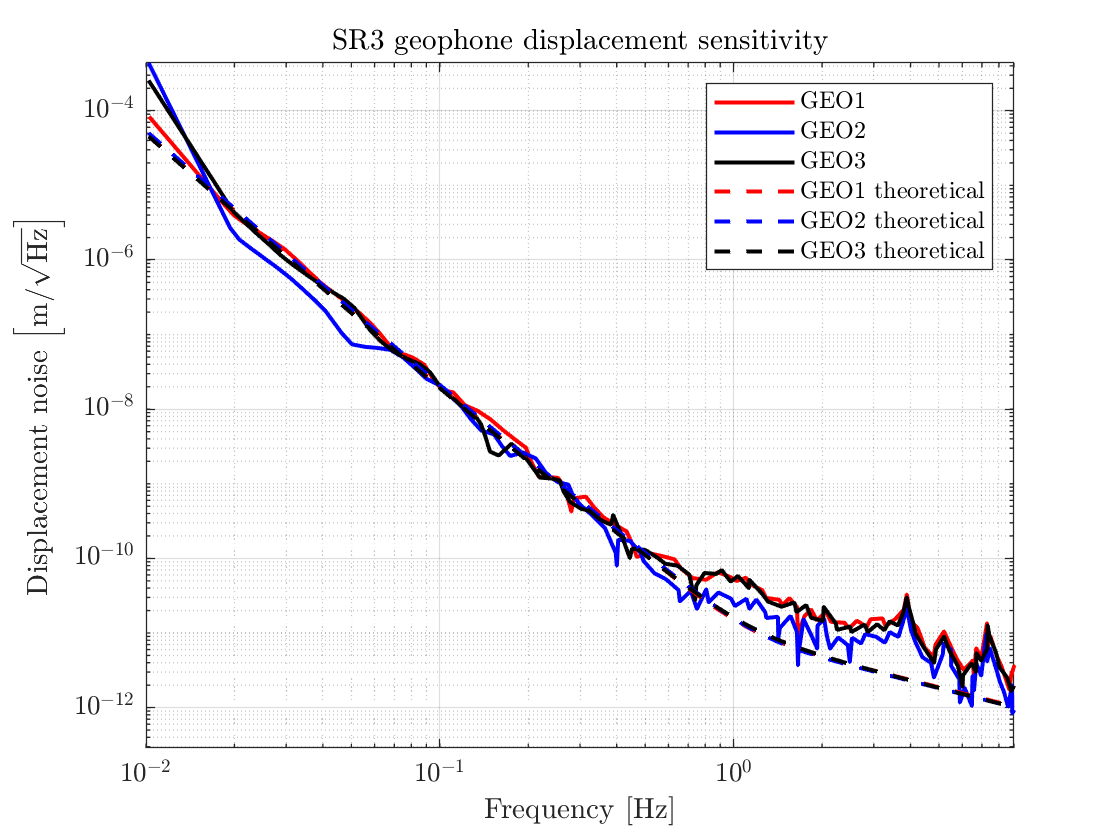
== SR3 ==
| geo_name | Ge [V/(m/s)] | f0 [Hz] | eta |
| geo-1 | 251.04 | 1.154 | 0.5165 |
| geo-2 | 258.14 | 1.214 | 0.5063 |
| geo-3 | 258.51 | 1.154 | 0.5695 |
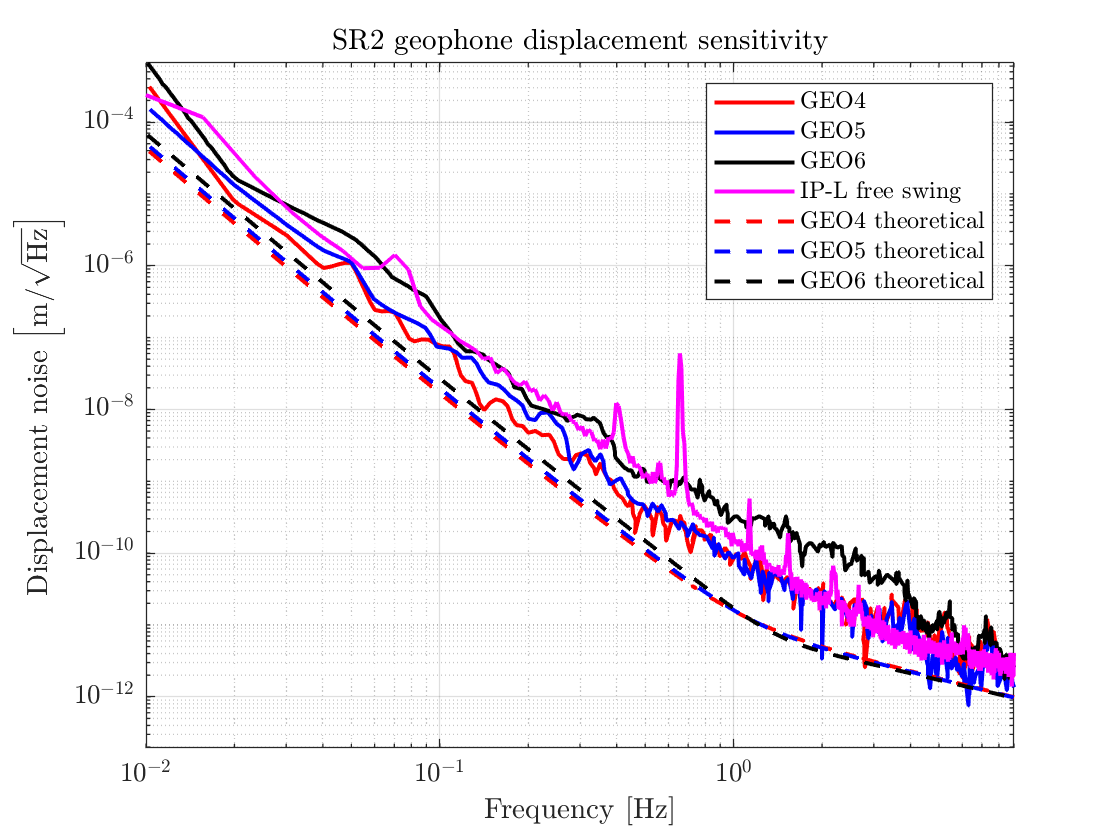
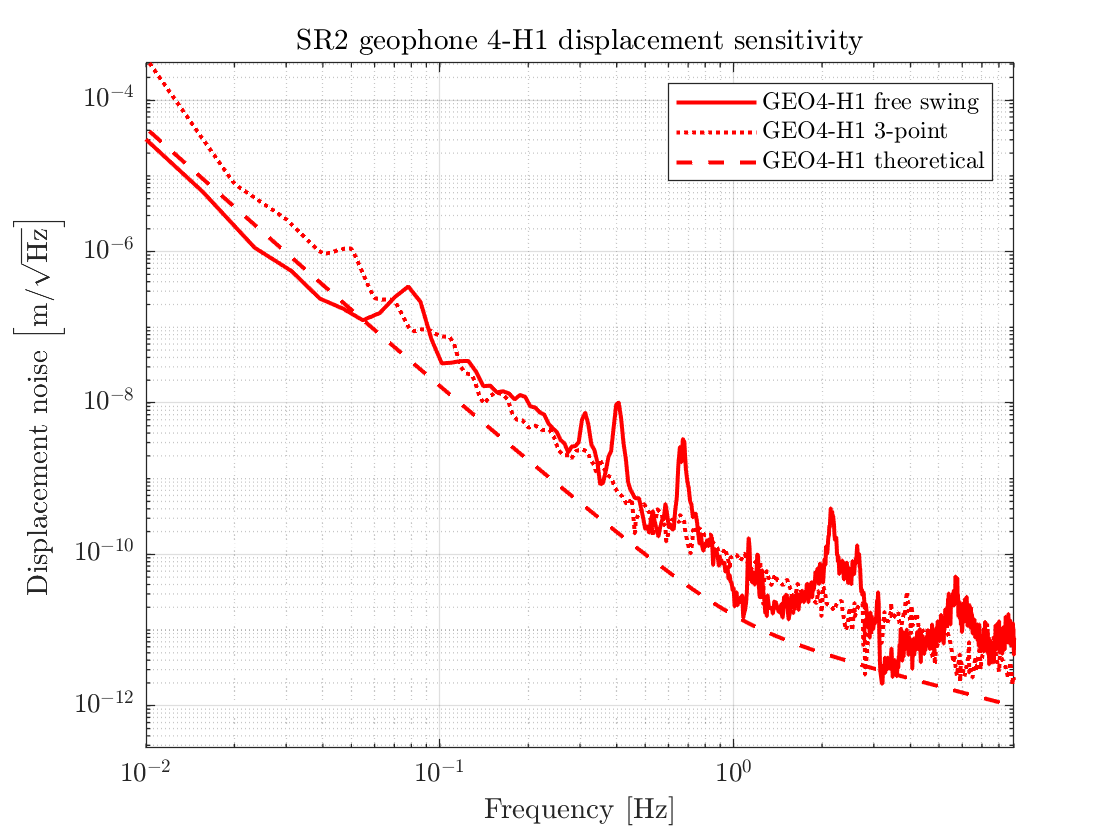
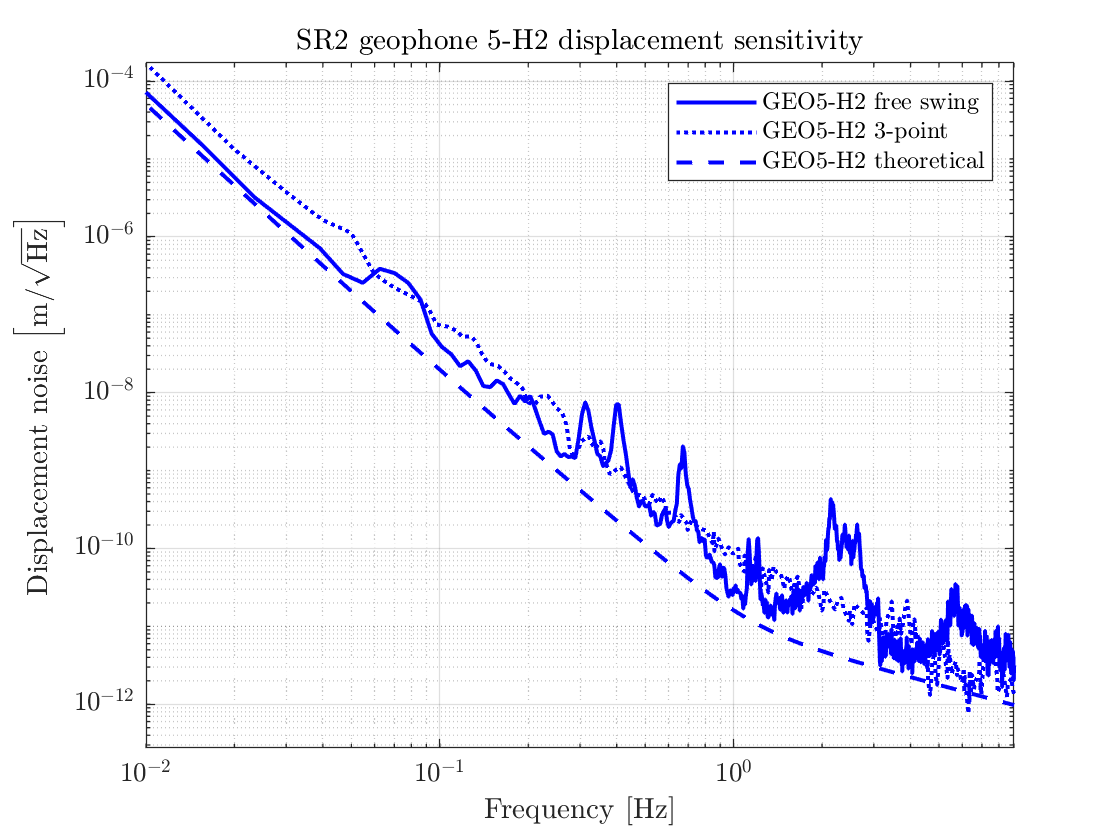
== SR2 ==
| geo_name | Ge [V/(m/s)] | f0 [Hz] | eta |
| geo-4 | 264.86 | 1.094 | 0.6022 |
| geo-5 (reference) | 267.535 | 1.193 | 0.5559 |
| geo-6 | 269.65 | 1.401 | 0.4383 |
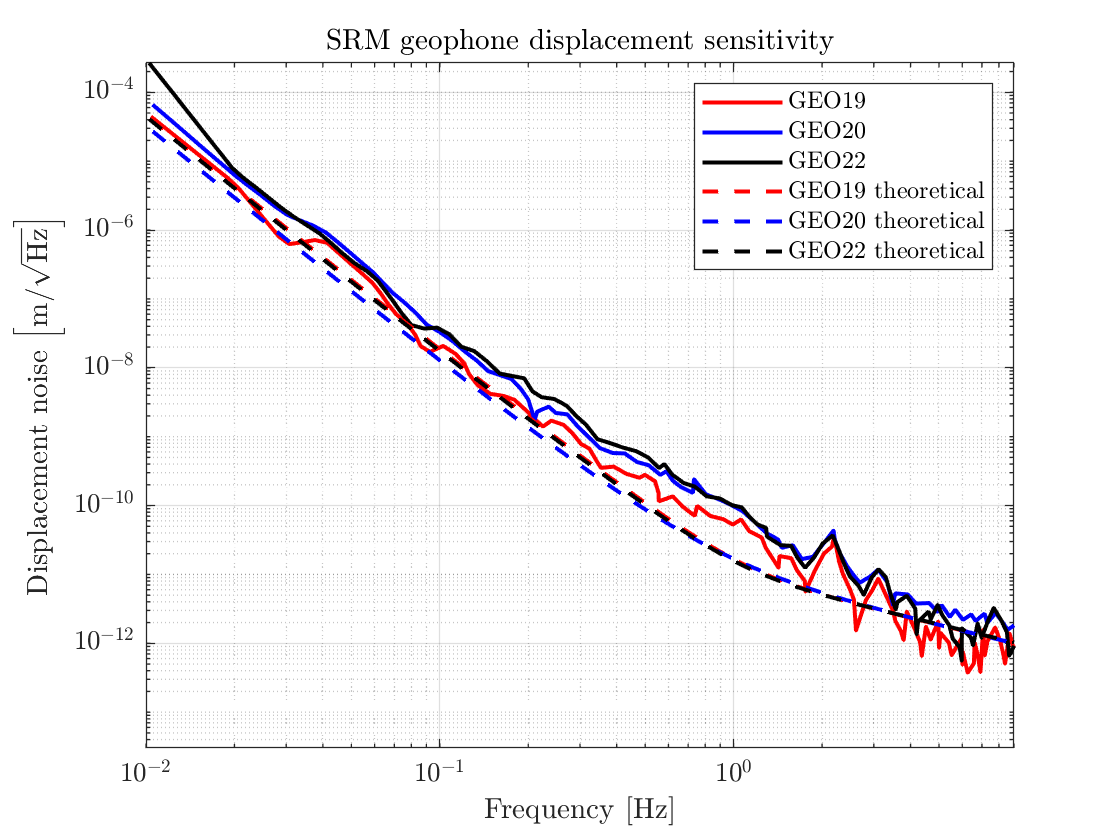
== SRM==
-- These were measured before closing the flanges for a sanity check.
| geo_name | Ge [V/(m/s)] | f0 [Hz] | eta |
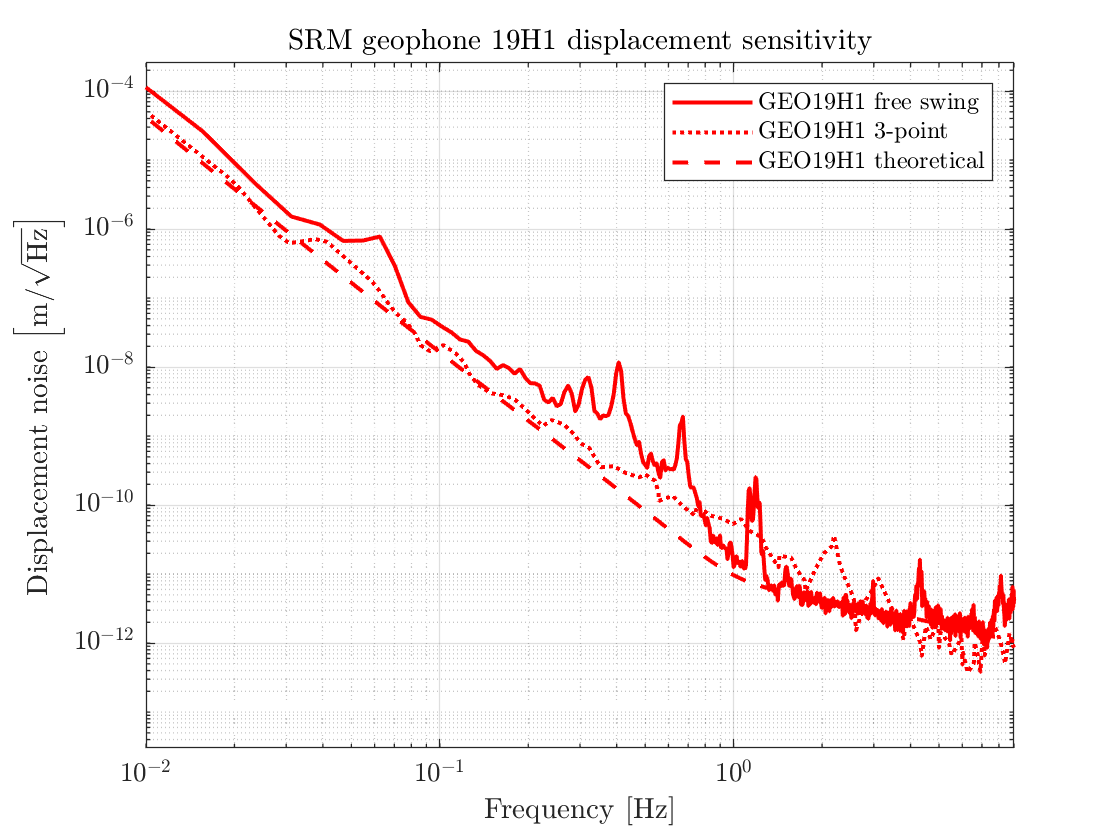
| geo-19 | 257.64 | 1.135 | 0.6049 |
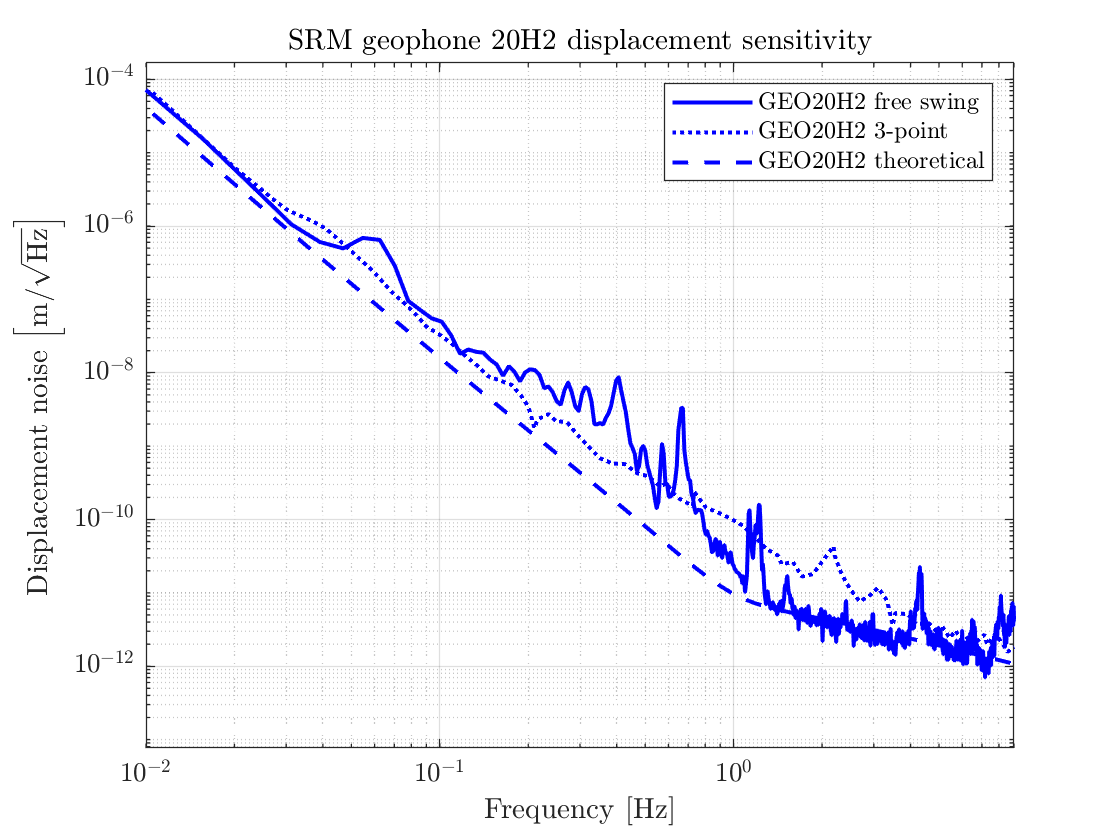
| geo-20 | 262.65 | 0.95 | 0.7513 |
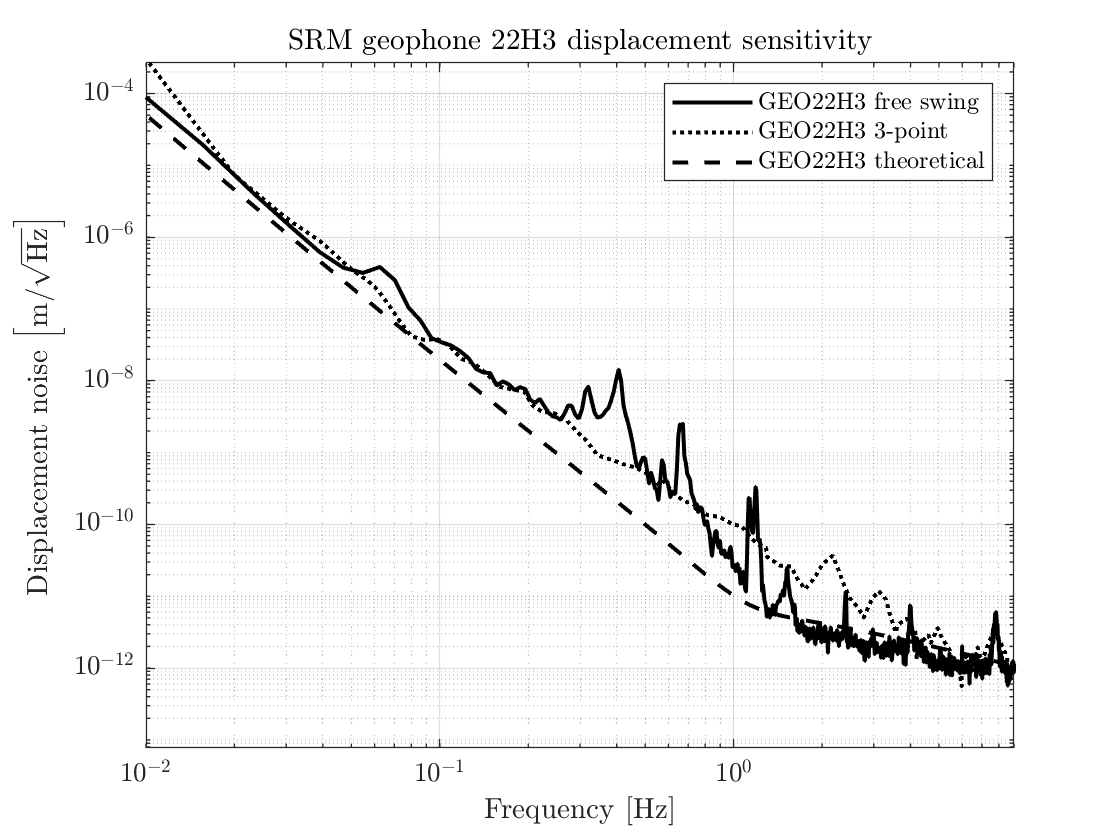
| geo-22 | 253.08 | 1.091 | 0.5836 |
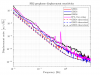
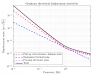
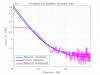
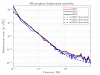
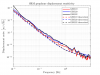
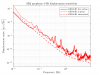
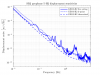
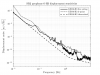
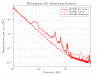
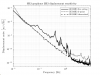
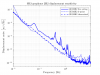
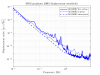
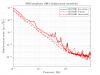
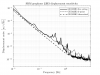
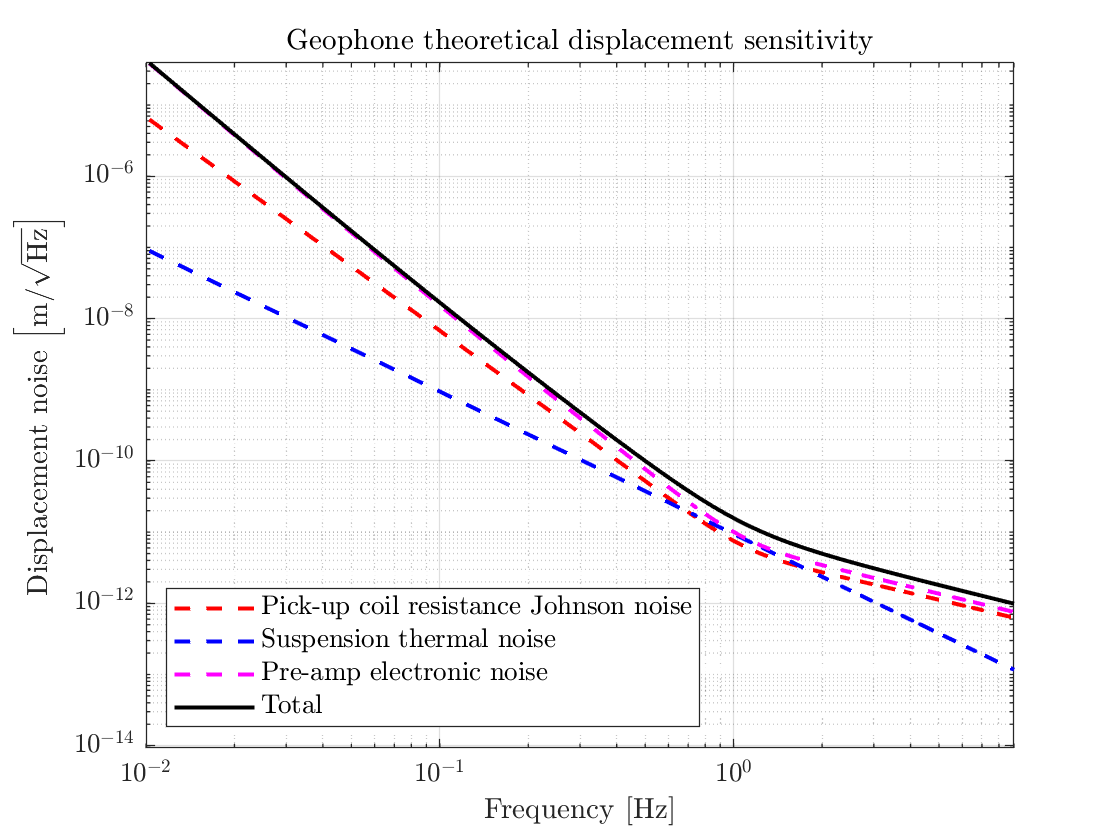
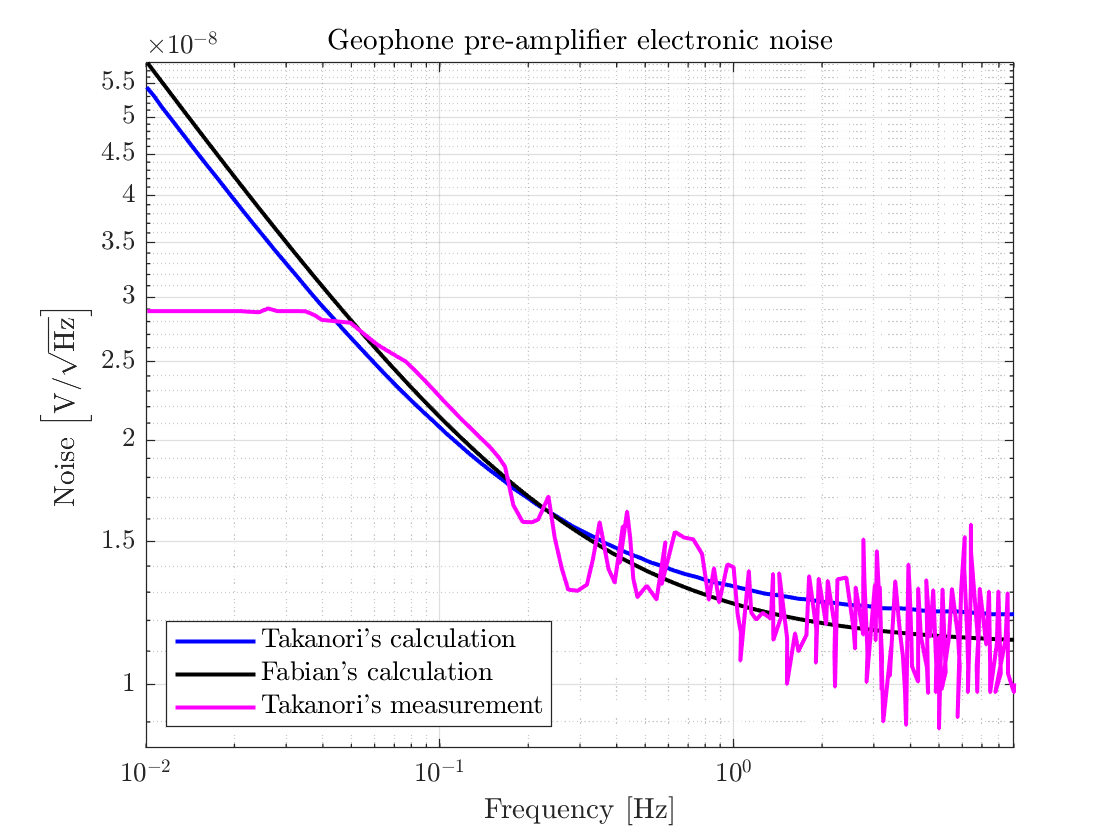
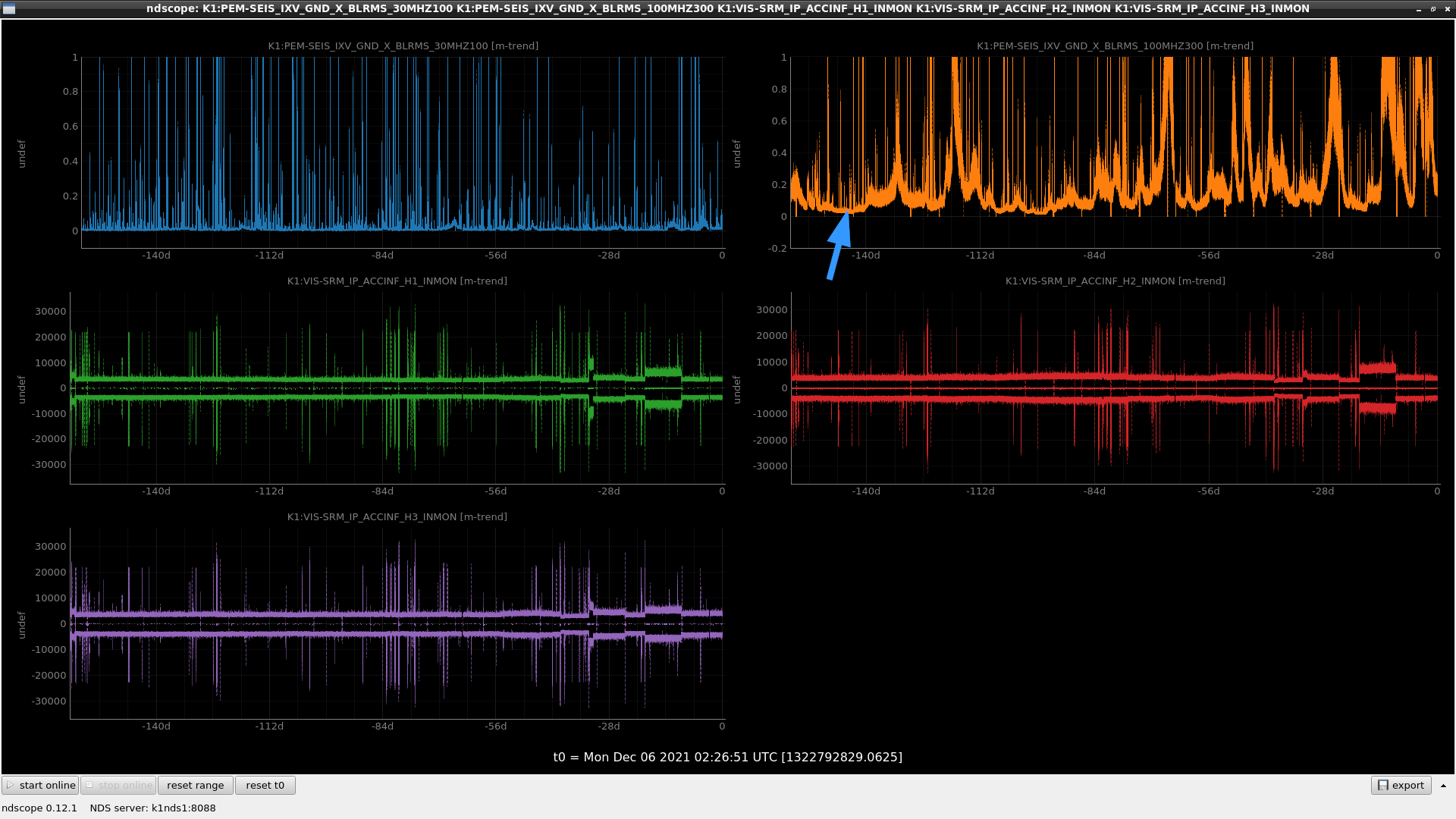
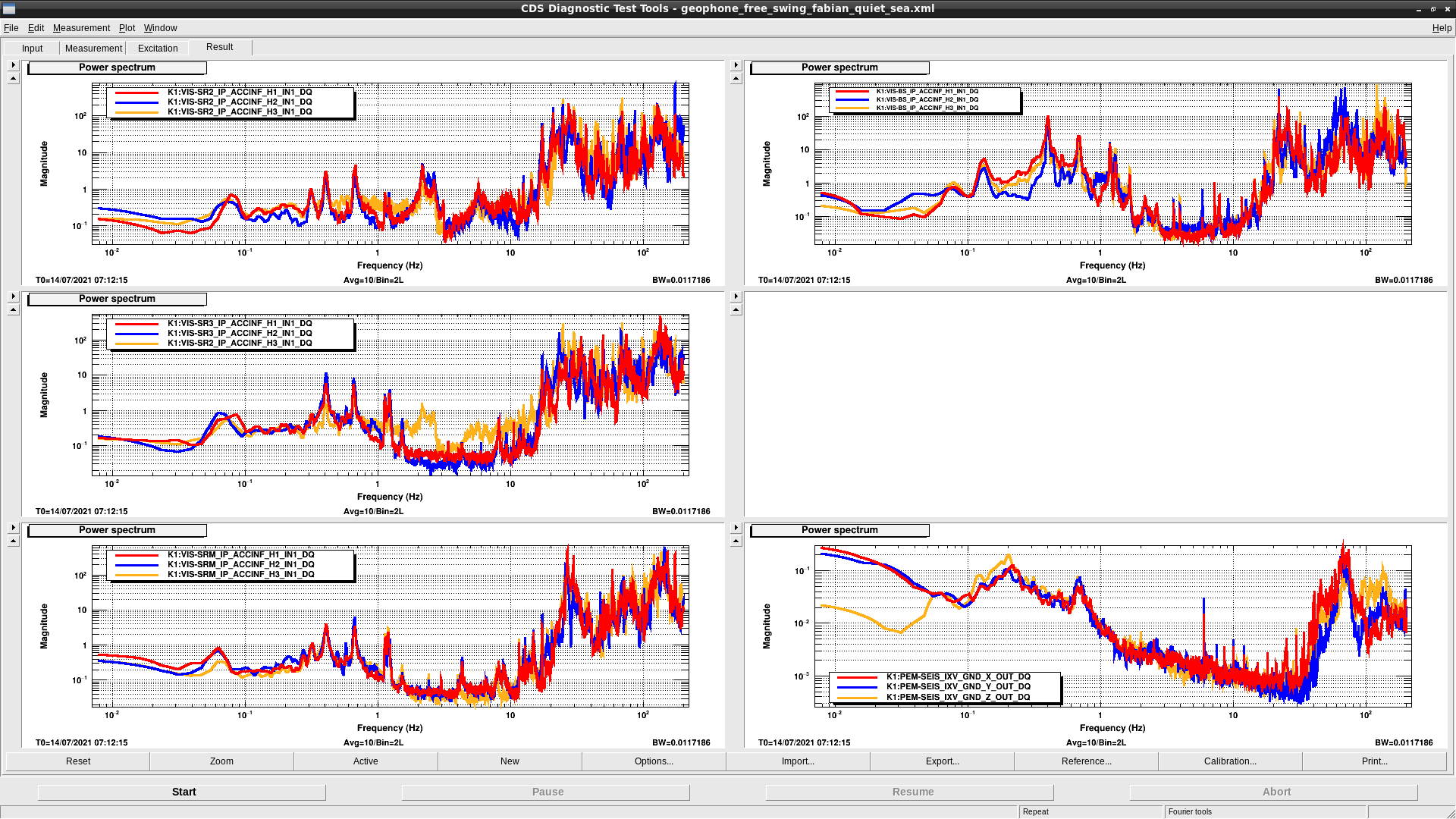
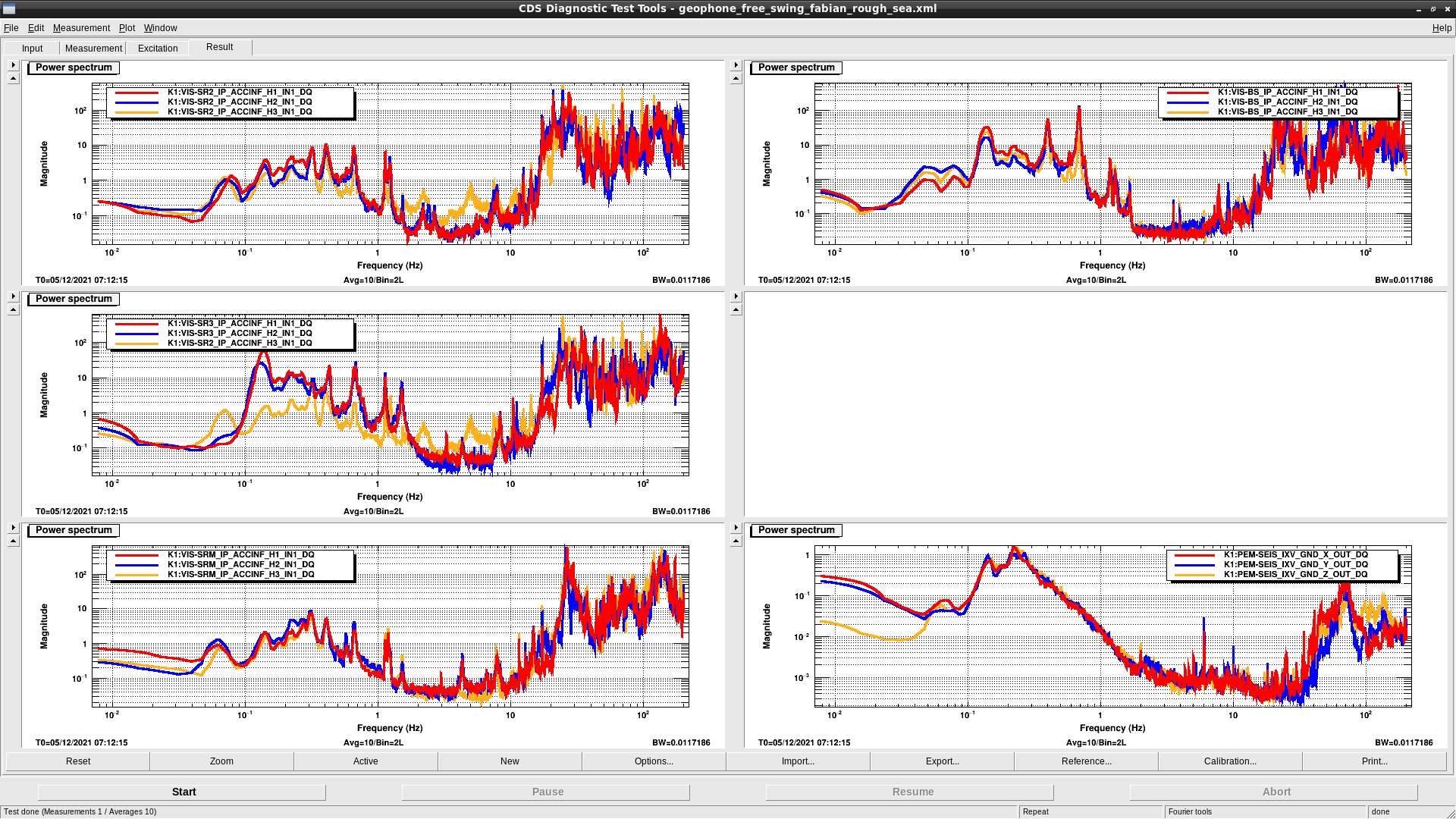
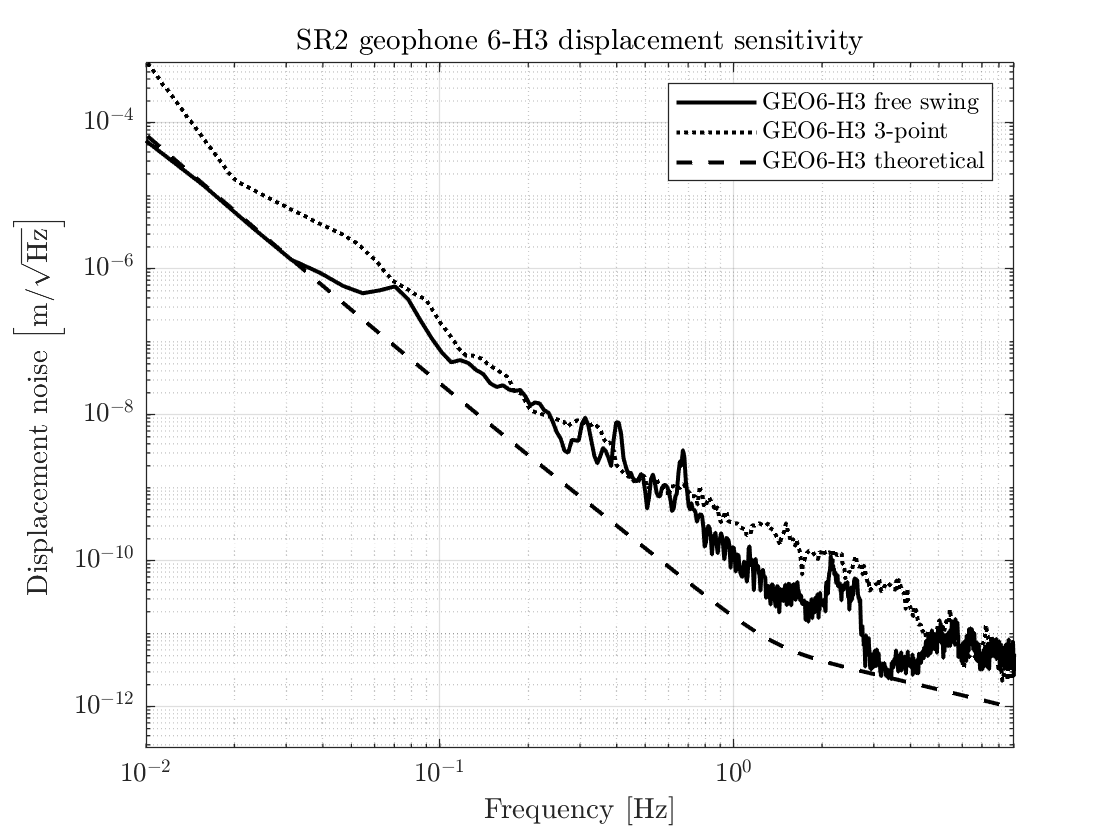
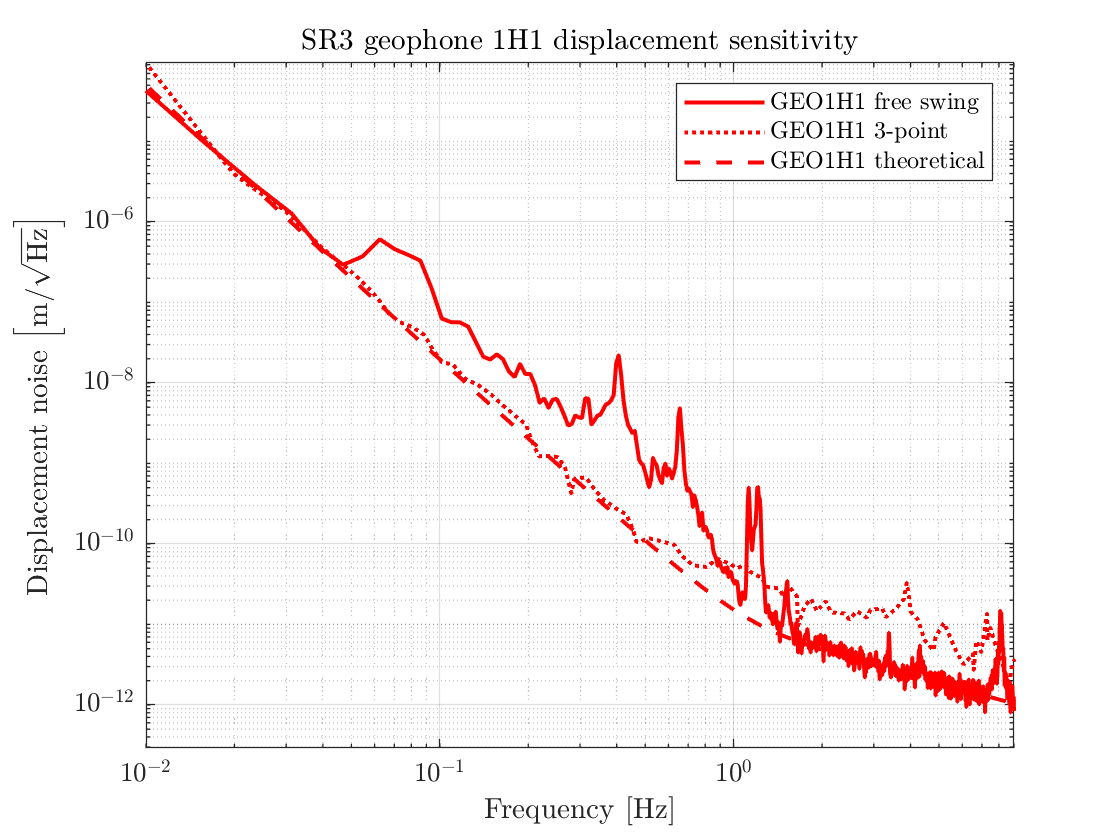
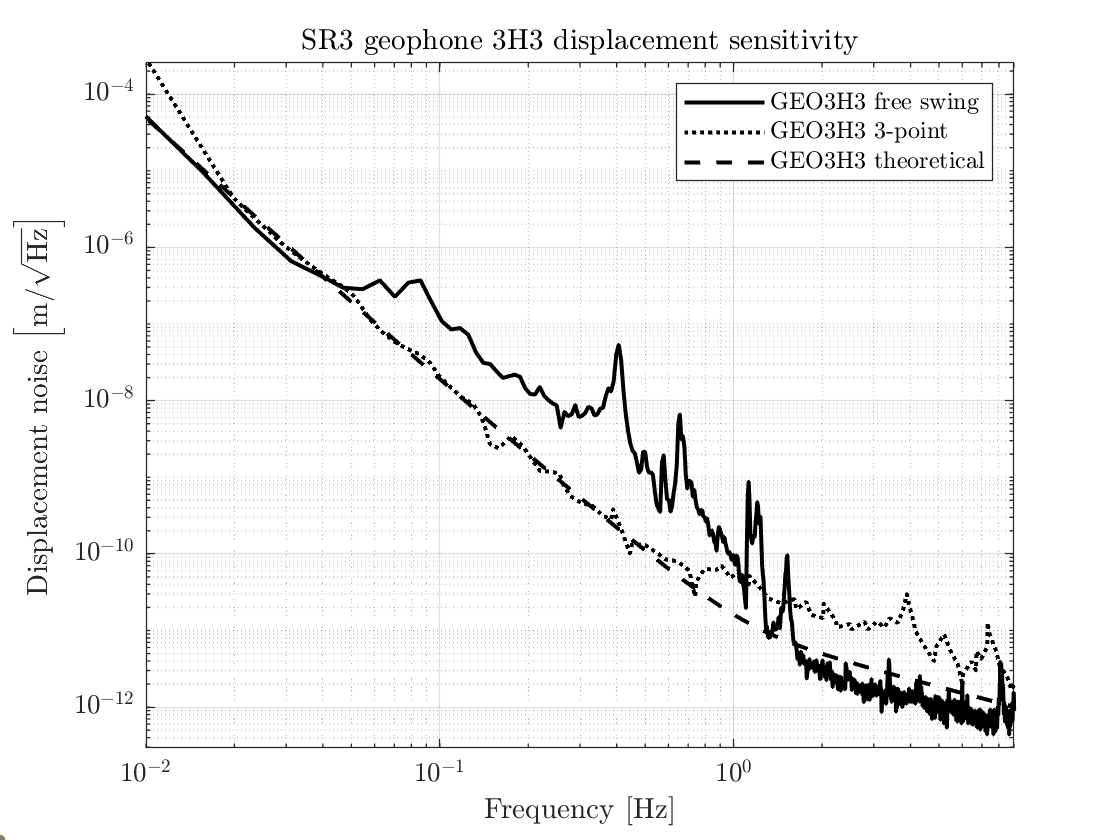
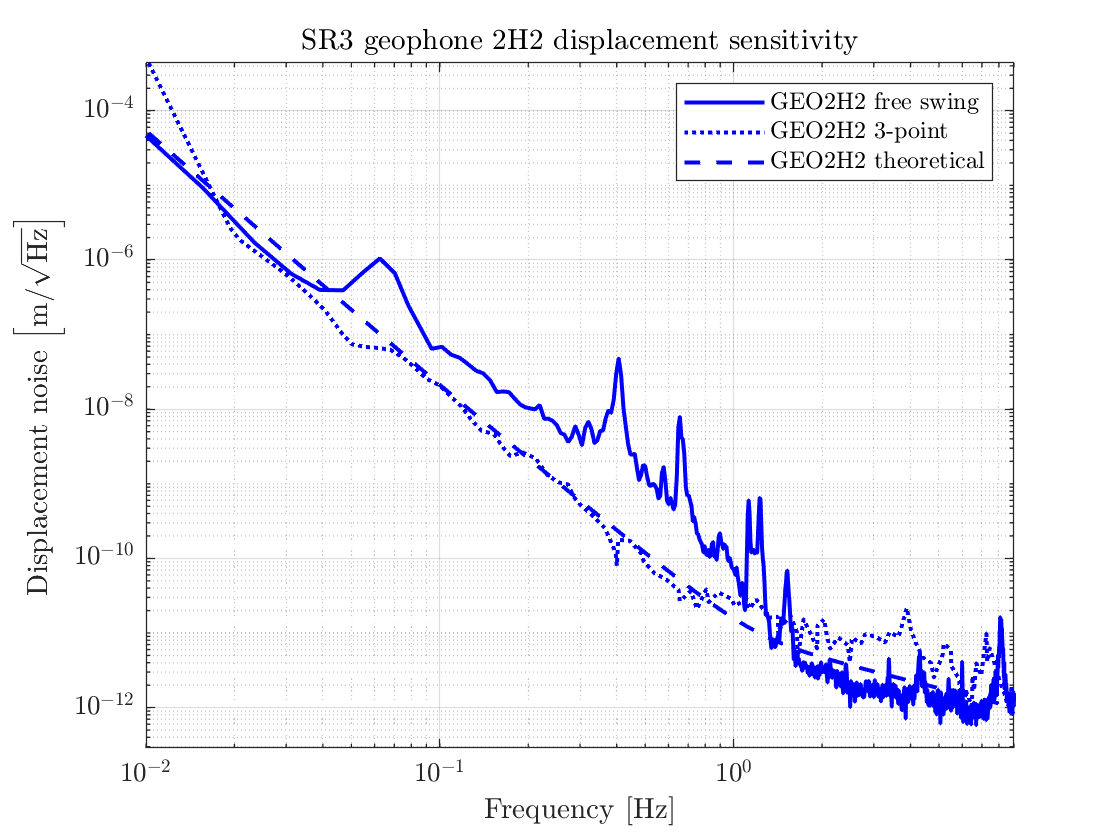
= Sensor noise measurement =
-- Using the parameters, the noise level of the geophones were estimated with 3 channel correlation analysis. The attachments show the noise level of the geophones. (Only the spectra of the geophones for SRM were compared with spectra of seismometer at IXV.)
Ge [V/(m/s)]10000-10000.gwf
-rw-r--r--. 1 virgorun virgo 7.0G Nov 5 12:22 MbtaHL-968920000-10000.gwf



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}