I had tested the Pcal GRD code.
It works as we expect.
I had tested the Pcal GRD code.
It works as we expect.
Aritomi, Tanaka
We performed some trials, mainly transition from 1f to 3f. But the trial was not work. We need more investigation.
### DRMI lock modification
This morning, DRMI lock got unstable for some reasons. One reason is that MICH loop is oscillated at SRM ADS frequency: ~6 Hz. At that moment, we were not sure of the cause of the oscillation. At once, we turned off only SRM ADS. Also, we changed the setpoints. Then, DRMI lock became stable a little. Another reason is that sometimes PRCL began the oscillation at ~100 Hz. After DRMI lock becoming stable a little, we measued the OLTFs. PRCL UGF increased to 100 Hz though the phase margin was less than 10 deg. So we lowered the gain. Similarly, SRCL OLTF seems to get better. We adjusted the gain. Current SRCL UGF is ~60 Hz (fig.1), PRCL UGF is ~40 Hz (fig.2).
Finally, the gains of the loop summerized the FM4 filter.
### Trial of the transition from 1f to 3f
To transit to 3f signal, we performed the phasing of 3f signals. we followed the procedure in klog32604. As for PRCL, we performed the phasing for REFL135 PD to maximize the I signal when PRCL was excited(fig.3). As for SRCL, we performed the phasing for REFL51 PD to maximize the I signal when SRCL was excited (fig.4). After that, we checked the RF51 signal when MICH was excited. Although the demod. phase is optimized for the SRCL signal, I signal was larger than Q signal when MICH was excited because BS motion is mixture with common and differential length change (fig.5). So we may need to decouple each motion. However, this time, we proceeded our work with this state.
We measued each relative gain and phase between 1f and 3f signals. the figures in the right lower 2 panes of fig. 3, 4, and 5 show each gain and phase of PRCL, SRCL, and MICH. As you can see, the relative phase of SRCL and PRCL seems to be 180 deg. But, the phase of MICH is 40 deg since there are some couplings. Anyway, we input these values in matrix (fig.6) and tried the transition. Then we succeeded PRCL and SRCL transition but failed MICH transition. So we moved the decoupling.
To decouple the DoFs, we excited the one DoFs, PRCL (left panel in fig.1) or SRCL (left panel in fig.2) and measued the relative gain and phase of between excited DoF error signal and others' error signal. From the results, I chosed CARM_IN1 as decoupled sensor for MICH 3F for the test, XARM_IN1 as decoupled SRCL 3F, and YARM_IN1 as decoupled PRCL 3F. After the decoupling, I measured the coupling but the ratio seems not to changed.
### DRMI ADS modification
This morning, we also found that DRMI began the oscillation at ~6 Hz just after engaging ADS. 6.3 Hz is the dither frequency of SRM YAW. The resG for SRM ADS in the MICH loop caused the oscillation. After decoupling the 1f error signals, MICH OLTF seems to got better than before. According to the MICH loop, current MICH UGF is around 10 Hz (fig.6). So I turned off the resG filter in engaging ADS. Then, ADSs seem to become stable.
### DRMI alignment Implementation to the INITIAL_ALIGNMENT guardian
After the modification of DRMI ADS, I implemented the DRMI alignment state with DRMI_1F_LOCKED into the INITIAL_ALIGNMENT guardian. I have not checked INITIAL_ALIGNMENT guardian behavior due to the earthquake.
With Dan Chen
We continued the work from the previous day. (klog_37206)
By adjusting the two mirrors newly installed inside the Pcal-Y Tx module (Fig. 1), we successfully aligned the new laser beam and propagated it to the RxPD.
On the RxPD, the beam position of the new laser appeared to be nearly identical to that of the current laser. The beam positions of the current laser and the new laser are shown in Fig. 2 and Fig. 3.
We also closed the OFS loop, and it appeared to operate normally.
Due to some remaining issues with the previous Pcal Guardian system, we have now updated the Pcal Guardian code to address these issues. The specific details are as follows:
Issue 1: Swap the order of HIGH_POWER and HIGH_POWER_RX_MON.
Before: INCREASE_OFFSET → HIGH_POWER_RX_MON → HIGH_POWER ⇄ WAITING_IFO HIGH_POWER_RX_MON → DECREASE_OFFSET HIGH_POWER → DECREASE_OFFSET
Update: INCREASE_OFFSET → HIGH_POWER ⇄ HIGH_POWER_RX_MON ⇄ WAITING_IFO HIGH_POWER → DECREASE_OFFSET HIGH_POWER_RX_MON → DECREASE_OFFSET
2.Issue: Turn on the injection switches in HIGH_POWER, and turn them off automatically when leaving the state.
Update: Added code to automatically turn on the injection switches in the HIGH_POWER state and automatically turn them off when leaving that state (entering HIGH_POWER_RX_MON or DECREASE_OFFSET).
3.Issue: Send a Slack notification if Guardian remains in HIGH_POWER for an extended period.
Update: Added the code to send a Slack notification.
4.Issue: Allow the real-time model to be stopped in the SAFE state.
Update: changed @lpd_check to a comment in the SAFE state.
The fitting results for the individual SRX resonance peaks presented in klog:37223 are summarized below. The measurement data are stored in Dropbox → All files/Dropbox KAGRA/Measurements/IFO/SRCL/SRCL_OMC_REFL_beat_signal_LO_sweep/2026_07_14_SRX.
Figure 3: Around 160 MHz, without a linear background. Using data from 161.8 MHz to 162.6 MHz, the fitted peak frequency is 162.3010 ± 0.0040 MHz.
Figure 4: Around 160 MHz, with a linear background. Using data from 161.8 MHz to 162.6 MHz, the fitted peak frequency is 162.415 ± 0.019 MHz.
Figure 5: Around 140 MHz, without a linear background. Using data from 126.9 MHz to 127.48 MHz, the fitted peak frequency is 127.1931 ± 0.0026 MHz.
Figure 6: Around 140 MHz, with a linear background. Using data from 126.9 MHz to 127.48 MHz, the fitted peak frequency is 127.2057 ± 0.0026 MHz.
Figure 7: Around −140 MHz, without a linear background. Using data from 125.0 MHz to 125.8 MHz, the fitted peak frequency is 125.3625 ± 0.0061 MHz.
Figure 8: Around −140 MHz, with a linear background. Using data from 125.0 MHz to 125.8 MHz, the fitted peak frequency is 125.235 ± 0.031 MHz.
Figure 9: Around −160 MHz, without a linear background. Using data from 157.9 MHz to 158.7 MHz, the fitted peak frequency is 158.2421 ± 0.0048 MHz.
Figure 10: Around −160 MHz, with a linear background. Using data from 157.9 MHz to 158.7 MHz, the fitted peak frequency is 158.1853 ± 0.0091 MHz.
Figure 11: Around −190 MHz, without a linear background. Using data from 193.0 MHz to 193.8 MHz, the fitted peak frequency is 193.3150 ± 0.0033 MHz.
Figure 12: Around −190 MHz, with a linear background. Using data from 193.0 MHz to 193.8 MHz, the fitted peak frequency is 193.2798 ± 0.0058 MHz.
The fitting results for the individual PRX resonance peaks presented in klog:37223 are summarized below. The measurement data are stored in Dropbox → All files/Dropbox KAGRA/Measurements/IFO/PRCL/PRCL_OMC_REFL_beat_signal_LO_sweep/2026_07_14_PRX.
The PRX and SRX data measured in klog:37209 were analyzed. The cavity lengths were determined by fitting the measured resonance frequencies. The differences between the measured and design cavity lengths were 1.25 ± 0.46 cm for PRX and 2.56 ± 0.45 cm for SRX. Since these differences exceed the estimated uncertainties, the actual PRX and SRX cavity lengths may differ from their design values.
The cavity lengths of PRX and SRX were determined using the following data.
PRX
Minimum (MHz) Maximum (MHz)
188.6412 188.6851
162.2368 162.3230
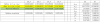
129.2967 129.3204
-125.3945 -125.3351
-158.3357 -158.2847
-186.8535 -186.7711
SRX
Minimum (MHz) Maximum (MHz)
195.1800 195.3102
162.2970 162.4341
127.1905 127.2084
-125.3685 -125.2040
-158.2469 -158.1762
-193.3183 -193.2740
From the measurement results, the midpoint between the minimum and maximum frequencies was calculated for each resonance. These midpoint frequencies were divided by the FSR calculated from the design cavity lengths (68.2563 m for PRX and 68.2562 m for SRX). The resulting values were rounded to the nearest integers, and the measured frequencies were fitted with the linear function AN+B, where A and B are fitting parameters and N is the rounded integer. The fitting results were as follows.
PRX (Fig. 1)
A: 2.19568 ± 0.00015 MHz
B: −0.2170 ± 0.0099 MHz
SRX (Fig. 2)
A: 2.19526 ± 0.00014 MHz
B: −0.1252 ± 0.0092 MHz
Since A corresponds to the FSR, the cavity lengths were calculated from the fitted values of A.
PRX
Measured cavity length: 68.2688 ± 0.0046 m
Design value: 68.2563 m
Difference (measured − design): 1.25 ± 0.46 cm
SRX
Measured cavity length: 68.2818 ± 0.0045 m
Design value: 68.2562 m
Difference (measured − design): 2.56 ± 0.45 cm
Therefore, the differences between the measured and design values for both PRX and SRX exceed the estimated uncertainties, suggesting that the actual cavity lengths may differ from their design values.
The SRM GRD says "GAS is close to saturation (F0)".
The K1:VIS-SRM_F0_COILOUTF_GAS_OUTPUT is ~25100 counts now.
I updated the Pcal guardian code based on the preparation report from Jinshui Tian and Yuli Liang.
We incorporated the minor improvements discussed so far.
A detailed report will follow.
Due to some remaining issues with the previous Pcal Guardian system, we have now updated the Pcal Guardian code to address these issues. The specific details are as follows:
Issue 1: Swap the order of HIGH_POWER and HIGH_POWER_RX_MON.
Before: INCREASE_OFFSET → HIGH_POWER_RX_MON → HIGH_POWER ⇄ WAITING_IFO HIGH_POWER_RX_MON → DECREASE_OFFSET HIGH_POWER → DECREASE_OFFSET
Update: INCREASE_OFFSET → HIGH_POWER ⇄ HIGH_POWER_RX_MON ⇄ WAITING_IFO HIGH_POWER → DECREASE_OFFSET HIGH_POWER_RX_MON → DECREASE_OFFSET
2.Issue: Turn on the injection switches in HIGH_POWER, and turn them off automatically when leaving the state.
Update: Added code to automatically turn on the injection switches in the HIGH_POWER state and automatically turn them off when leaving that state (entering HIGH_POWER_RX_MON or DECREASE_OFFSET).
3.Issue: Send a Slack notification if Guardian remains in HIGH_POWER for an extended period.
Update: Added the code to send a Slack notification.
4.Issue: Allow the real-time model to be stopped in the SAFE state.
Update: changed @lpd_check to a comment in the SAFE state.
I had tested the Pcal GRD code.
It works as we expect.
Tanaka, Aritomi
We succeeded in locking DRMI with 1F signals and also in engaging ADS for DRMI (IMMT2, PRM, BS, and SRM). We measured Open loop TFs of DRMI DoFs (PRCL, SRCL, MICH). Current Lock duration is at most 20 mins. However, the lock can be restored automatically soon. According to the results, there seem to be some couplings between the DoFs. Anyway, It is enough duration to characterize DRMI more finely.
We checked the current DRMI lock with 1f and 3f mixtur configuration (PRCL:3f, MICH, SRCL:1f, (ref. Takano-san's summary slide)). DRMI could be locked with this configuration but some offsets are necessary as setpoints of errro signals. And lock duration seemed to be short, less than 10 sec. We performed try and error to improve the duration. Eventually, we tried to change PRCL error signal from 3f (REFL135I) to 1f (POP45I) and succeeded in DRMI lock with 1f signal. This time, we changed the sign (3f:+ -> 1f:-) and increased the gain (3f:1 -> 1f:30). Also, we implemented the roll-off filters in loops. Moreover, There seems to be some offsets in error signals
After that, we measured OLTFs of their loops.
Fig.1 shows the PRCL OLTF, red shows the one in locking DRMI with the 1f signal and brue shows the one in locking PRMI with the 1f signal. According to KAGRA schnupp asymmetry, RF45 at AS port should be dark. So the PRCL response should not be changed if we use RF45 for PRCL, that is, the PRCL OLTF in locking DRMI should not be changed from the PRMI one. In this sense, the shape of red gain TF seems to be almost same as the brue one. However, as for the overall gain, we did not tuned finely. So the change of the overall gain is fine. On the other hands, phase TF seems to be changed from the PRMI one. This indicates there are some coupling between PRCL and other DoFs for some reason (MICH detune? upper/lower sideband asymmetry?)
Fig.2 and 3 show the MICH and SRCL OLTFs, respectively. Reds are the ones in locking DRMI, and blues are the ones in locking SRMI. OLTF could not be measued well maybe due to large coupling between DoFs.
After that, we tried to implement ADS for DRMI. I expected that the response of the RF45 build up power, POP90 shoud not be changed by the SRM exsitance. In this case, I assumed that only SRM ADS should be tuned and tuning for others is not necessary. I chosed AS34 as SRM ADS signal in locking DRMI and performed the phasing of the signals. Then we obtained the demod. phases of SRM ADS PIT:-174 deg(Fig.4), and YAW:170 deg(Fig.5). Thanks to the phasing, Q signals seems to become 0 after the phasing (Fig.6). They seem to be fine.
I engaged SRM ADS at the same time as BS, PRM, and IMMT2 ADSs after DRMI was locked. Fig. 7 shows the time series of ADS error/feedback signals and build up power in PRC (POP90) and SRC(AS34). After calming down the feedback signals, especially SRM YAW, POP90 and AS34 seems to be improved.
Now, the lock duratiion of DRMI with ADS is at most 20 mins (fig.8). For now, we do not investigate the cause of lock loss. Tomorrow, we will perform the DRMI characterization.
The fitting results for the individual PRY resonance peaks presented in klog:37209 are summarized below. The measurement data are stored in Dropbox → All files/Dropbox KAGRA/Measurements/IFO/PRCL/PRCL_OMC_REFL_beat_signal_LO_sweep/2026_07_14_PRY.
The fitting results for the individual SRY resonance peaks presented in klog:37209 are summarized below. The measurement data are stored in Dropbox → All files/Dropbox KAGRA/Measurements/IFO/SRCL/SRCL_OMC_REFL_beat_signal_LO_sweep/2026_07_14_SRY.
[Kimura and Yasui]
On July 15, as part of maintenance work on the cryogenic cooling units, we set up two valve units for the radiation shield cryo-coolers (IXC P-53 and IXC P-55).
The remaining tasks are filling the system with G-1 class helium gas up to 15 bar and performing leak tests on all connections.
Saito-kun,
Could you upload the overplot graphs of the raw data and the fitting functions similar to fig 2 and 3 in klog37201?
[Aritomi, Ushiba, Tanaka, Saito]
Sub-laser light was injected into the SRY, PRY, PRX, and SRX, and a PLL was established. The LO frequency was then swept to scan the beat signal. Using the maximum hold function of the Moku:Lab spectrum analyzer, transmission power as a function of frequency was recorded around 190 MHz, 160 MHz, 140 MHz, −140 MHz, −160 MHz, and −190 MHz. The data were fitted both with and without a linear background, and the maximum and minimum peak frequencies within the corresponding fitting uncertainties were determined. The cavity lengths were then calculated from these results. The differences between the measured cavity lengths and the design values were 0.15 ± 0.33 cm for PRY and 1.58 ± 0.82 cm for SRY. Therefore, the PRY measurement is consistent with the design value within its uncertainty of 0.33 cm, whereas the SRY measurement differs from the design value by more than the estimated uncertainty, suggesting that the actual cavity length may differ from the design value. The results for PRX and SRX will be reported after the analysis is completed.
For the data near each resonance peak, fitting was performed both with and without a linear background, following the same procedure as in the previous analysis (klog:37201). From the fitted peak frequencies and their uncertainties, the maximum and minimum frequencies within the fitting uncertainty were determined. The overall uncertainty range was then defined as the largest and smallest values obtained from both fitting models. The following data were used to determine the PRY and SRY cavity lengths.
PRY
Minimum (MHz) Maximum (MHz)
186.9049 186.9561
163.8426 163.8974
131.4761 131.5159
-115.5105 -115.4909
-157.0807 -157.0589
-189.4049 -189.3442
SRY
Minimum (MHz) Maximum (MHz)
186.8354 186.9305
166.0559 166.2530
131.4035 131.4918
-127.2003 -126.2609
-159.4324 -159.3557
-189.3570 -189.2707
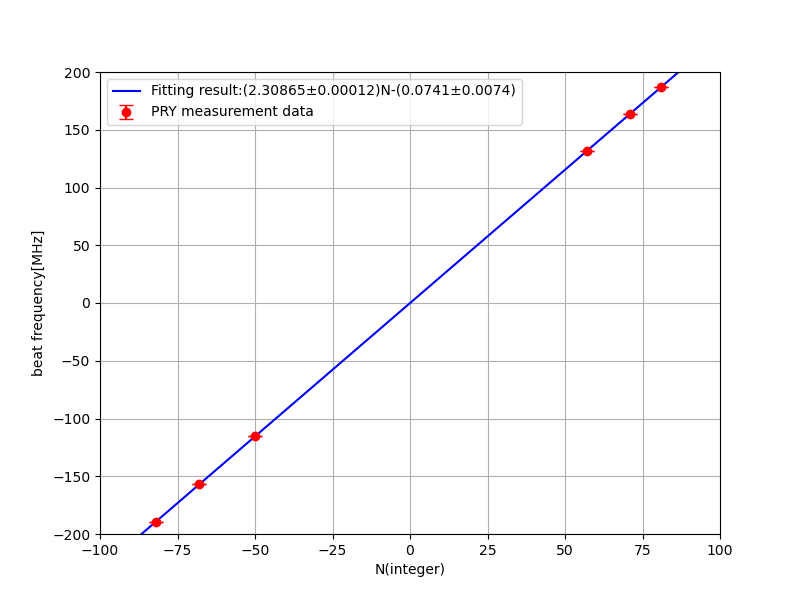
From the measurement results, the midpoint between the minimum and maximum frequencies was calculated for each resonance. These midpoint frequencies were divided by the FSR calculated from the design cavity lengths (64.9265 m for PRY and 64.9264 m for SRY). The resulting values were rounded to the nearest integers, and the measured frequencies were fitted with the linear function AN+B, where A and B are fitting parameters and N is the rounded integer. The fitting results were as follows.
PRY (Fig. 1)
A: 2.30865 ± 0.00012 MHz
B: −0.0741 ± 0.0074 MHz
SRY (Fig. 2)
A: 2.30815 ± 0.00029 MHz
B: −0.092 ± 0.021 MHz
Since A corresponds to the FSR, the cavity lengths were calculated from the fitted values of A.
PRY
Measured cavity length: 64.9280 ± 0.0033 m
Design value: 64.9265 m
Difference (measured − design): 0.15 ± 0.33 cm
SRY
Measured cavity length: 64.9422 ± 0.0082 m
Design value: 64.9264 m
Difference (measured − design): 1.58 ± 0.82 cm
Therefore, the PRY measurement is consistent with the design value within the uncertainty of 0.33 cm. In contrast, the difference between the measured and design values for SRY exceeds the estimated uncertainty, suggesting that the actual SRY cavity length may differ from the design value. The results for PRX and SRX will be posted once the analysis has been completed.
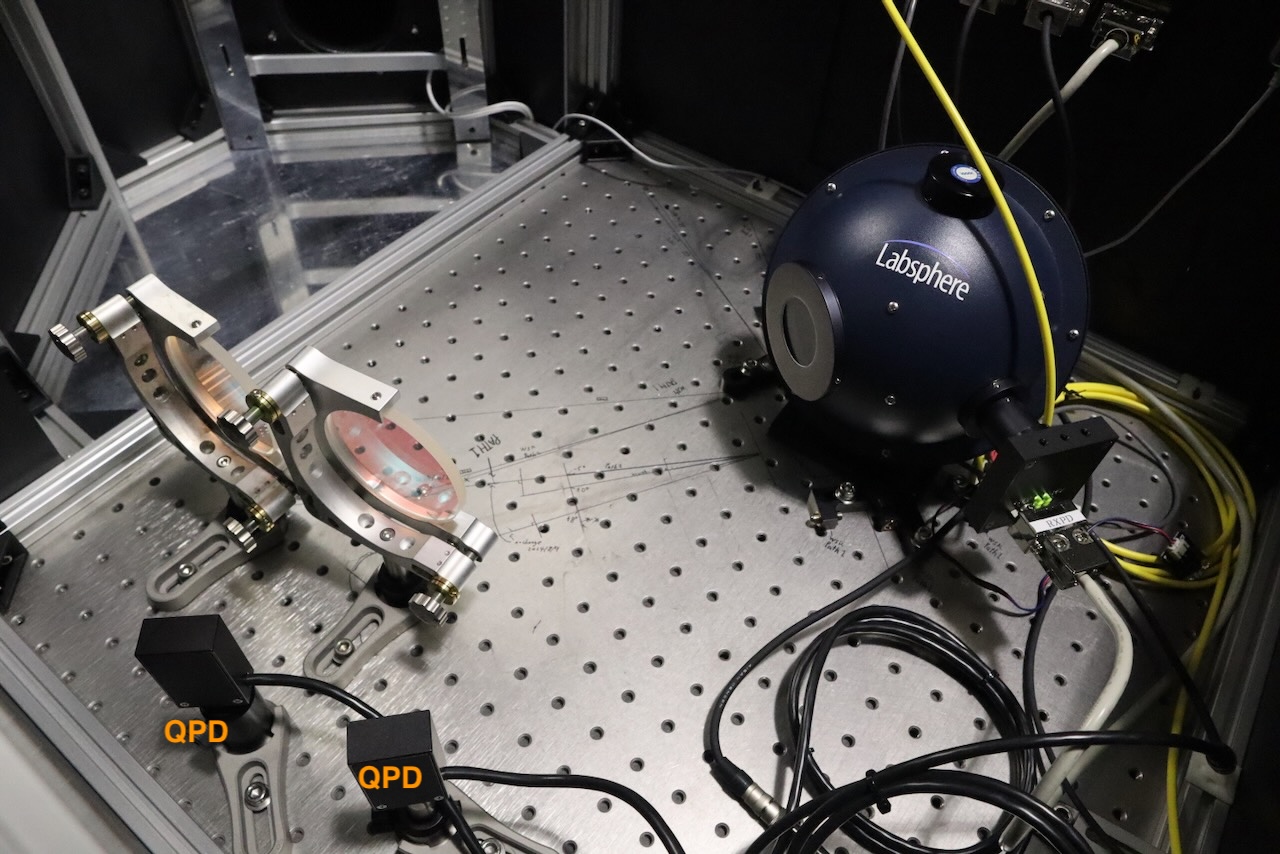
With Misato Onishi, Yuli Liang, Jinshui Tian
We installed 2 QPDs in Rx module on 7/14 for the Pcal beam monitoring.
And, I took Tcam data with changing Pcal beam positions by the pico PCAL_EY2 in the 7/15 morning.
The data will be analysed to check the QPD performance.
With Dan Chen, Yuli Liang, Jinshui Tian
We continued the work from the previous day. (37183)
Before starting the work, we recorded the alignment of the current YPcal laser using the previously prepared reference setup.
We reduced the power of the main beam path of new laser using HWP before performing the alignment work.
We aligned the beam from the new laser and successfully extracted it from the Tx module.
At the end of the work, we turned on the current laser and checked the beam position on the RxPD.
No significant change was observed, indicating that the installation and alignment work had not affected the alignment of the existing laser.
I collected the high-power coil driver (HPCD) from EYV (S1604763) and brought it back to Mozumi.
According to Saito-kun, HV amp (x10) was directly connected to the laser PZT input for the PLL lock. According to my past experiences, the direct connection tends to excite PZT at high frequency.
To solve this problem, we inserted a passive LPF that is set as one of the filters for the control servo between the PZT input and the HV. According to my memory, 10Hz ?? LPF and 100kHz?? LPF were used as one of the control filters. So what I can suggest is to set a passive LPF btw the PZT and the HV, and remove the same LPF in the control filters. I have a ponoma case and a film condenser (400V?) in my room.
Another concern is that the UGF at 10kHz for the PLL control might to excite some resonances of the PZT as in the main laser frequency stabilization servo.








































































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}