[Dan, Sawada, YamaT]
Abstract
We did full measurements of IFO calibration.
Thanks to the recent ASC works, IFO was very stable.
So our measurements was going well.
Data analysis haven't been finished yet.
Details
MICH optical gain by Free swinging
We took a 10minute-long fringe data before (7:22 JST-) and after (8:33 JST-) the measurement of MICH OLTF.
Optical gain of MICH was estimated by using POP17Q and POPDC1.
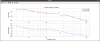
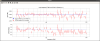
Fig.1 shows one of estimated optical gain from 64second-long data.
(All results are saved in /users/Commissioning/data/MICH/FSM/2023/0426/)
Estimated optical gain is very stable in time.
Statistical fluctuation in time is ~ 0.2%
Hc_mich = (1.0893 +/- 0.0022) * 10^9 [m/ct]
Systematic error haven't been evaluated yet.
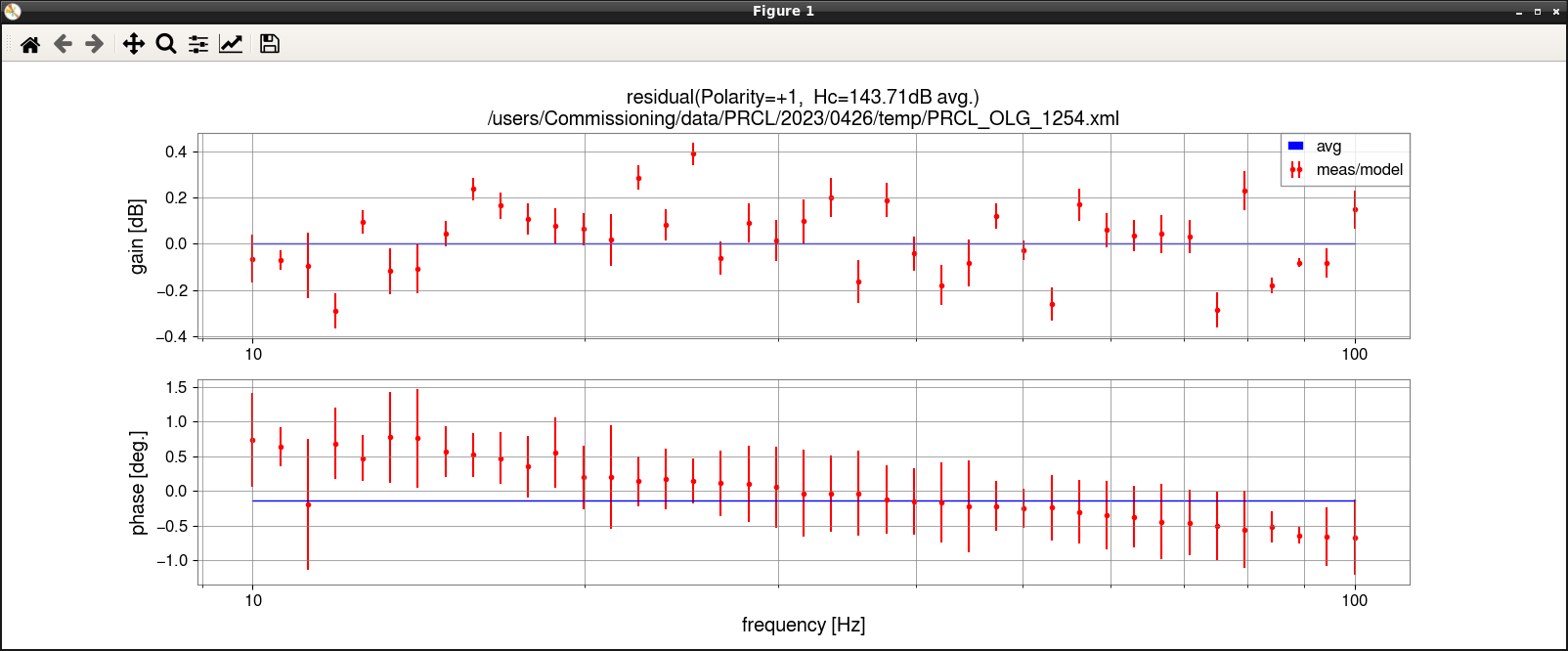
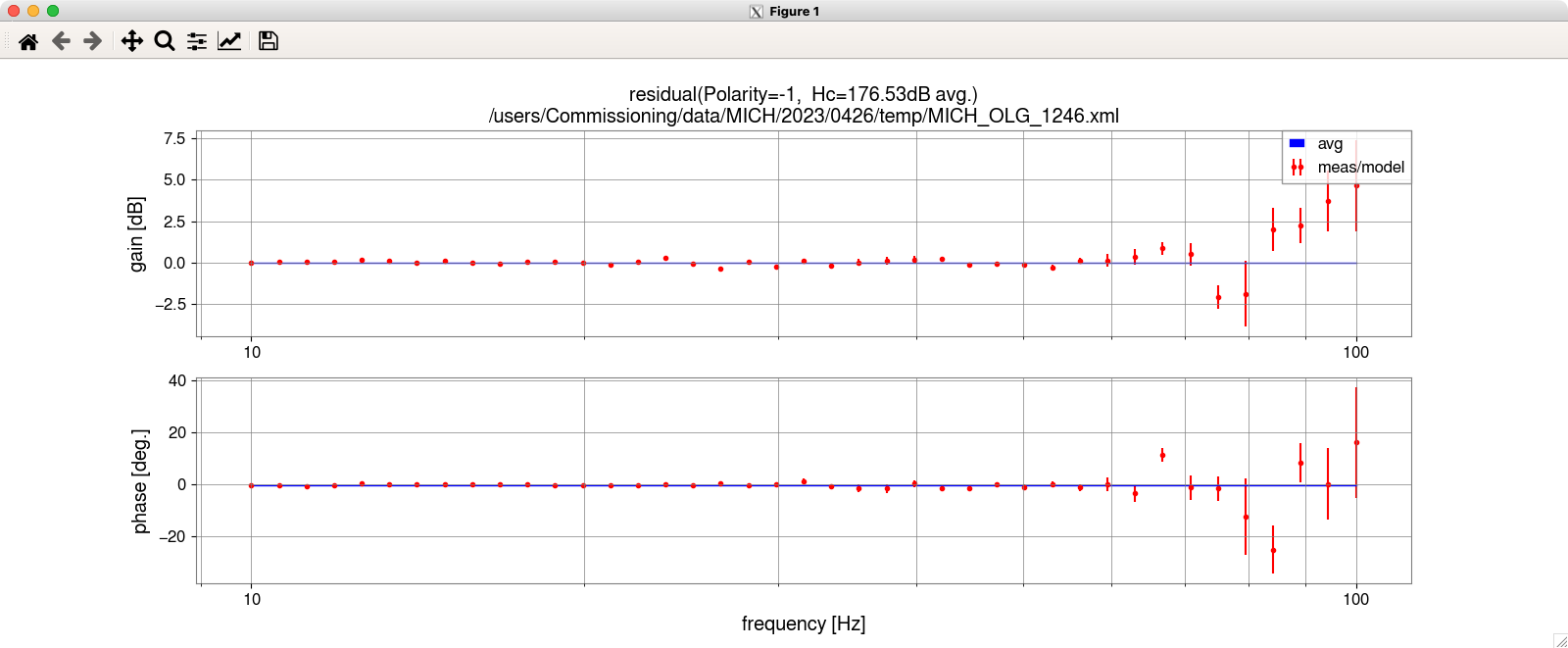
Actuator efficiency ratio of ITMX TM and BS TM with MICH
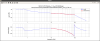
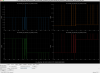
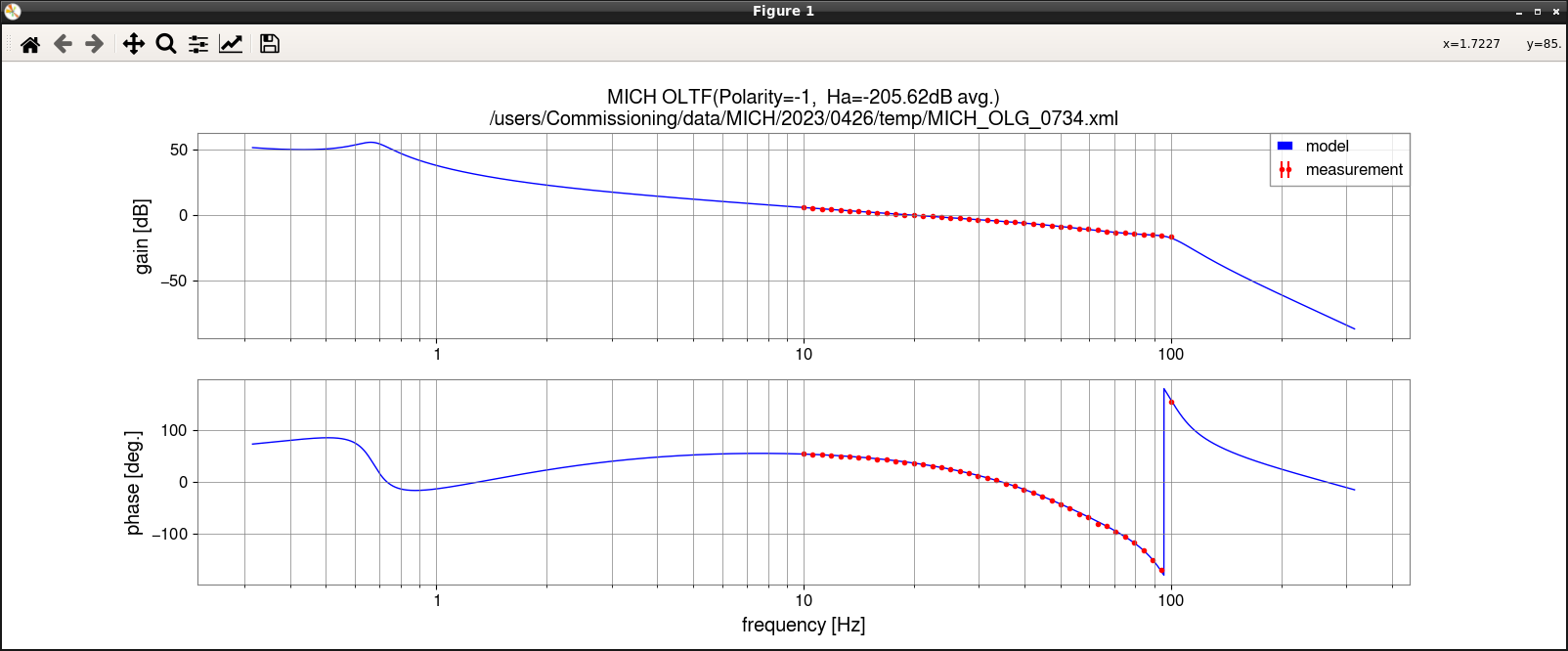
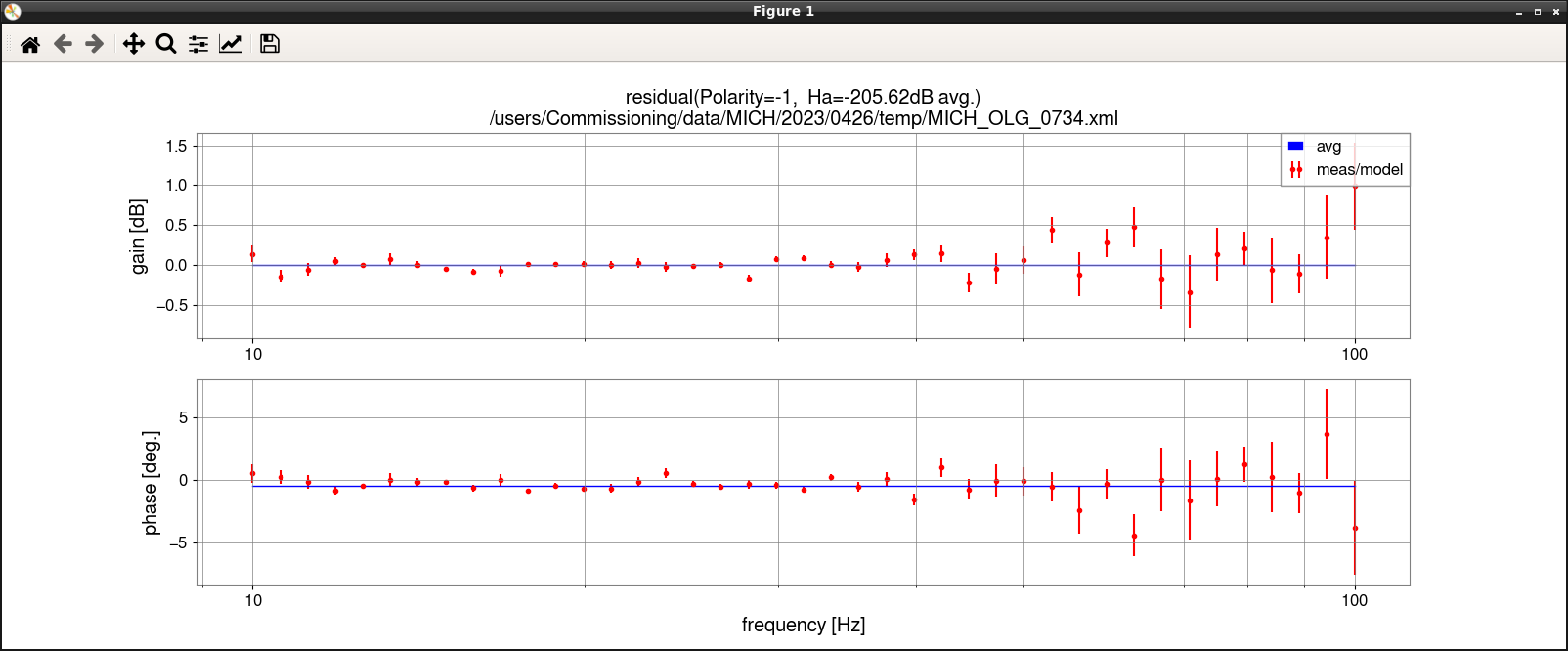
In order to decide the actuator efficiency of ITMX TM, transfer function from BS TM and ITMX TM to MICH error signal were measured.
These results are shown in Fig.2.
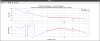
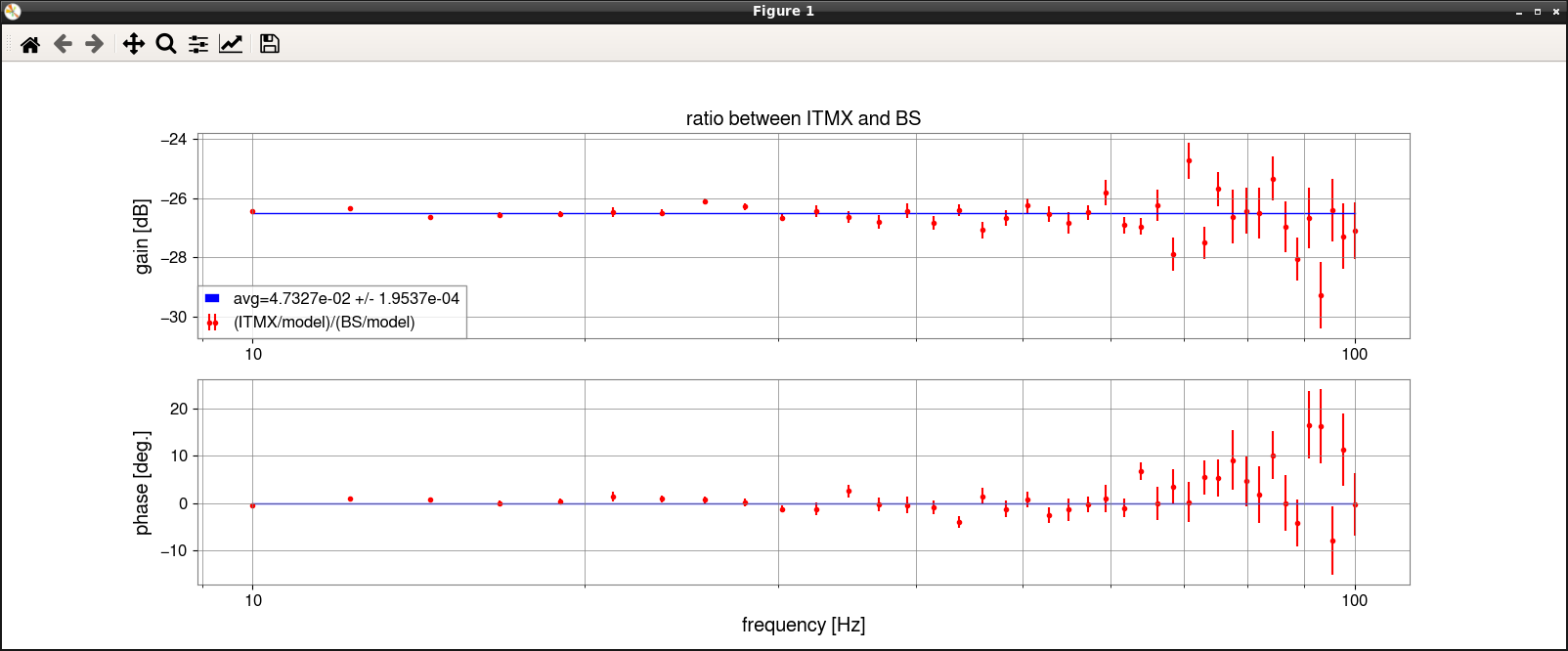
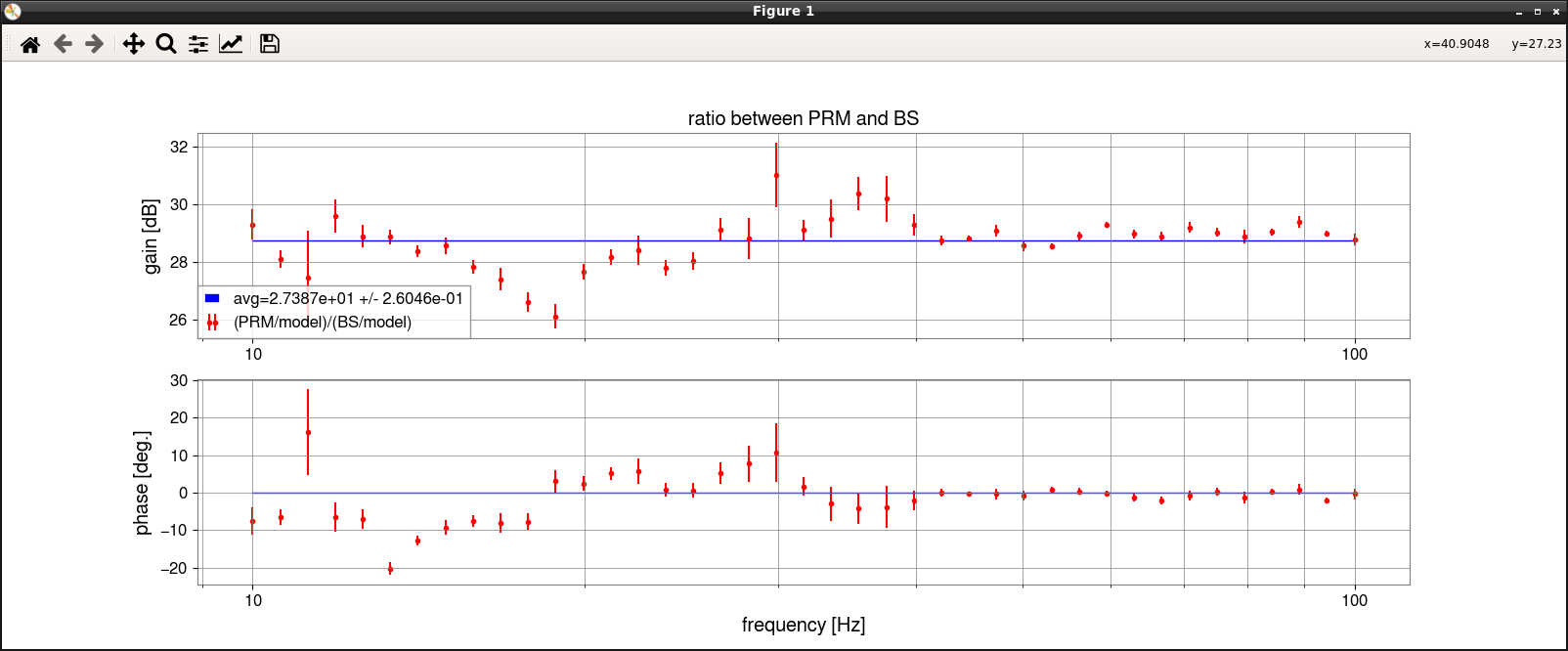
Actuator efficiency ratio was estimated by the ratio of these two transfer functions and estimated value is ITMX/BS = 0.04732 as shown in Fig.3
Note that corner frequency around 30Hz in measured transfer function is unknown effect in MICH length loop model.
It may come from coupling from other DoF. So it should be checked more carefully.
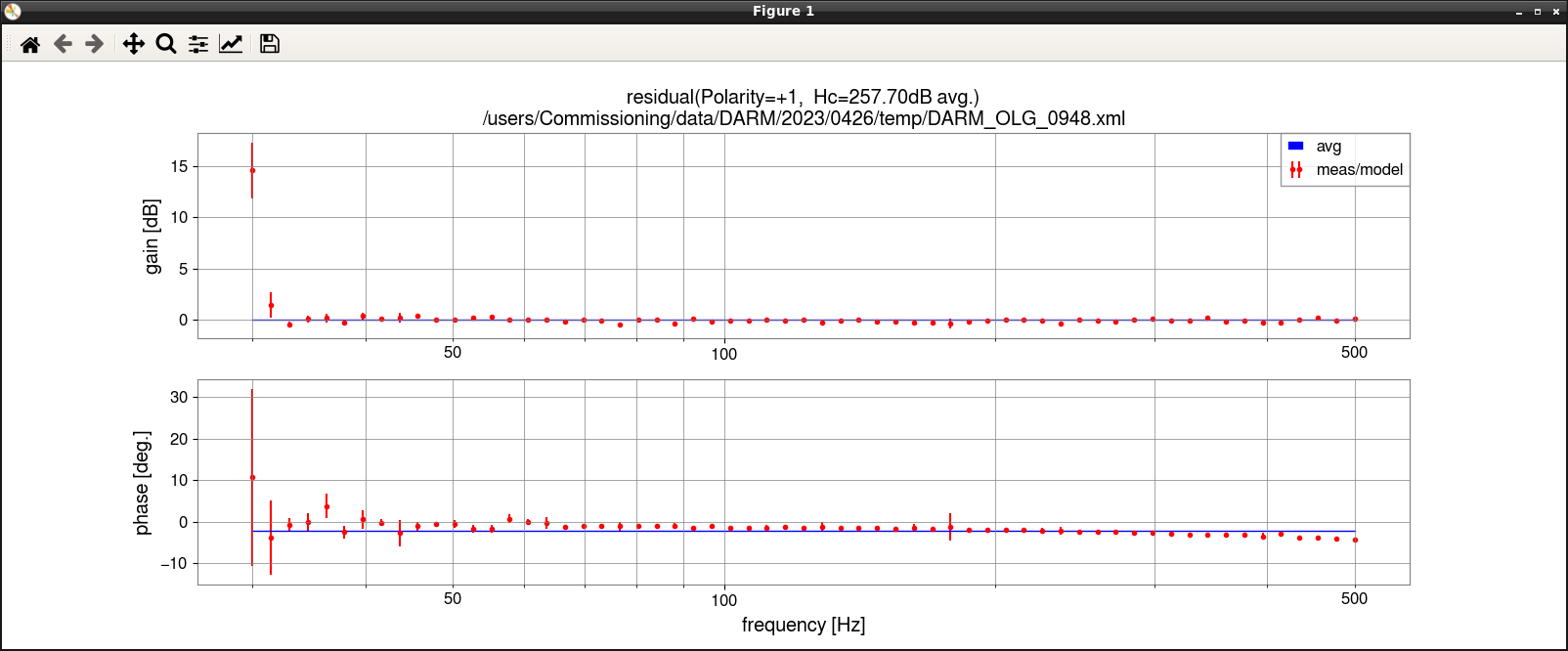
Actuator efficiency ratio of ETMX TM and ITMX TM with DARM
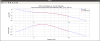
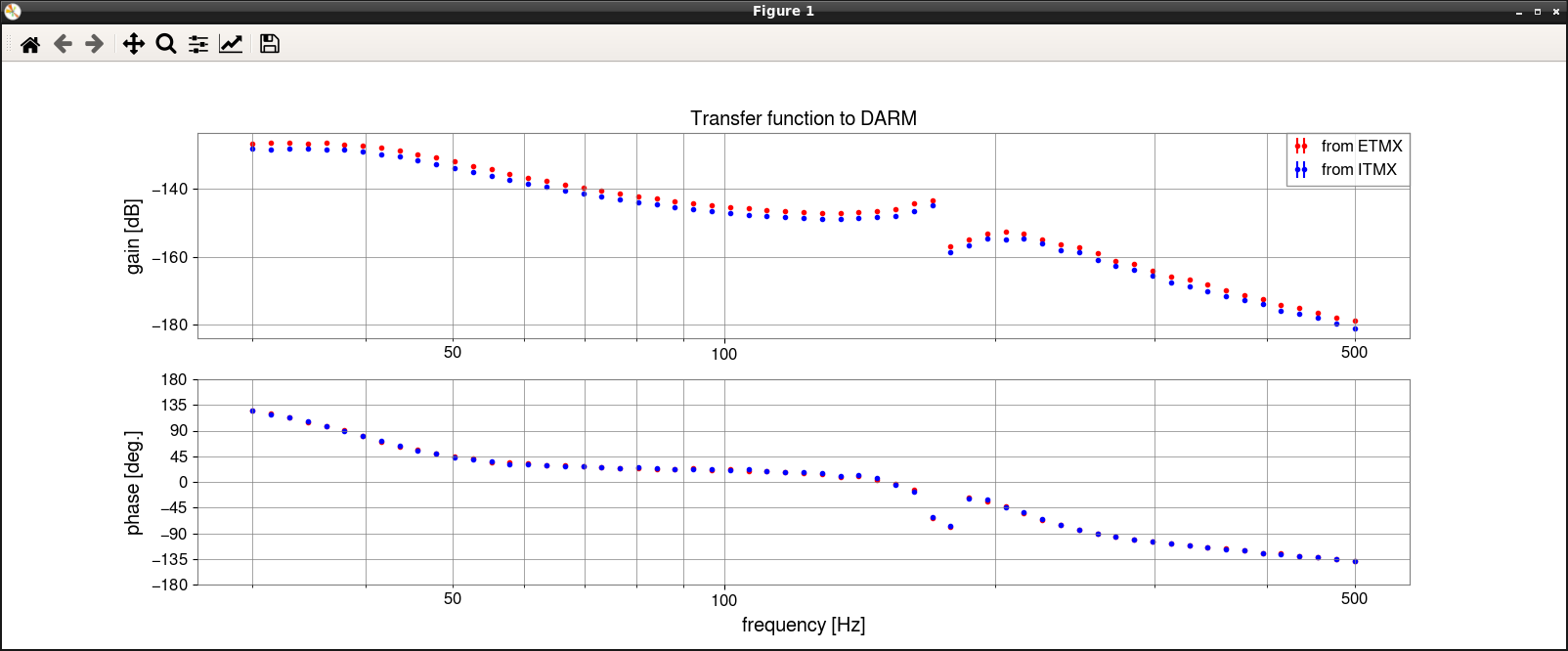
Actuator efficiency ratio of ETMX and ITMX is also estimated by measuring transfer functions from each suspension to DARM error signal.
Results are shown in Fig.4.
Gap around 180Hz comes from the violin mode. (Violin mode seems to be coherency in the time scale of injected swept sine.)
It must be removed from injected frequency points in the measurement just before O4a.
But in this time, we didn't remeasure it. We removed these measured points by analytically.
Estimated actuator efficiency ratio is ETMX/ITMX = 1.223 as shown in Fig.5.
We also measured TFs from IM stage and MN stages. But analysis haven't been finished.
In this time we measured TF from 30Hz to 500Hz.
In order to obtain better coherence for IM and MN stages, we planned to add measurement frequency points below 30Hz in the next measurement.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}