[Ushiba, YamaT]
Abstract
MICH was locked stably with a 3f signal, so we measured optical gain and actuator efficiency of BS TM.
Measured actuator efficiency is ~5.9e-11 * f^{-2} which seems to be consistent with ones measured in O3 (I haven't estimated an error in detail yet).
Details
Optical gain of MICH
Optical gain of MICH was estimated by using MICH fringes at first.
As shown in Fig.1, estimated optical gain H_mich is ~4.9e6 [ct/m] (= 0.42ct * 4 * \pi / 1064e-9m)
where H_mich means from the MICH displacement to K1:LSC-REFL_PDA2_RF51_Q_ERR_DQ.
We need to take care that optical gain which is used for reconstructing the MICH displacement is from the MICH displacement to K1:LSC-MICH_IN1_DQ.
Relation between K1:LSC-MICH_IN1_DQ and K1:LSC-REFL_PDA2_RF51_Q_ERR_DQ is
K1:LSC-MICH_IN1_DQ = K1:LSC-REFL_PDA2_RF51_Q_ERR_DQ / K1:LSC-PSL_PWR_SCALE_OUT * K1:LSC-PD_DOF_MTRX_3_18.
Now K1:LSC-PSL_PWR_SCALE_OUT and K1:LSC-PD_DOF_MTRX_3_18 is ~2.4 and 1.0, respectively.
So optical gain for CAL is ~2.0e6 [ct/m] (=4.9e6 / 2.4 * 1.0).
Actuator efficiency of BS TM
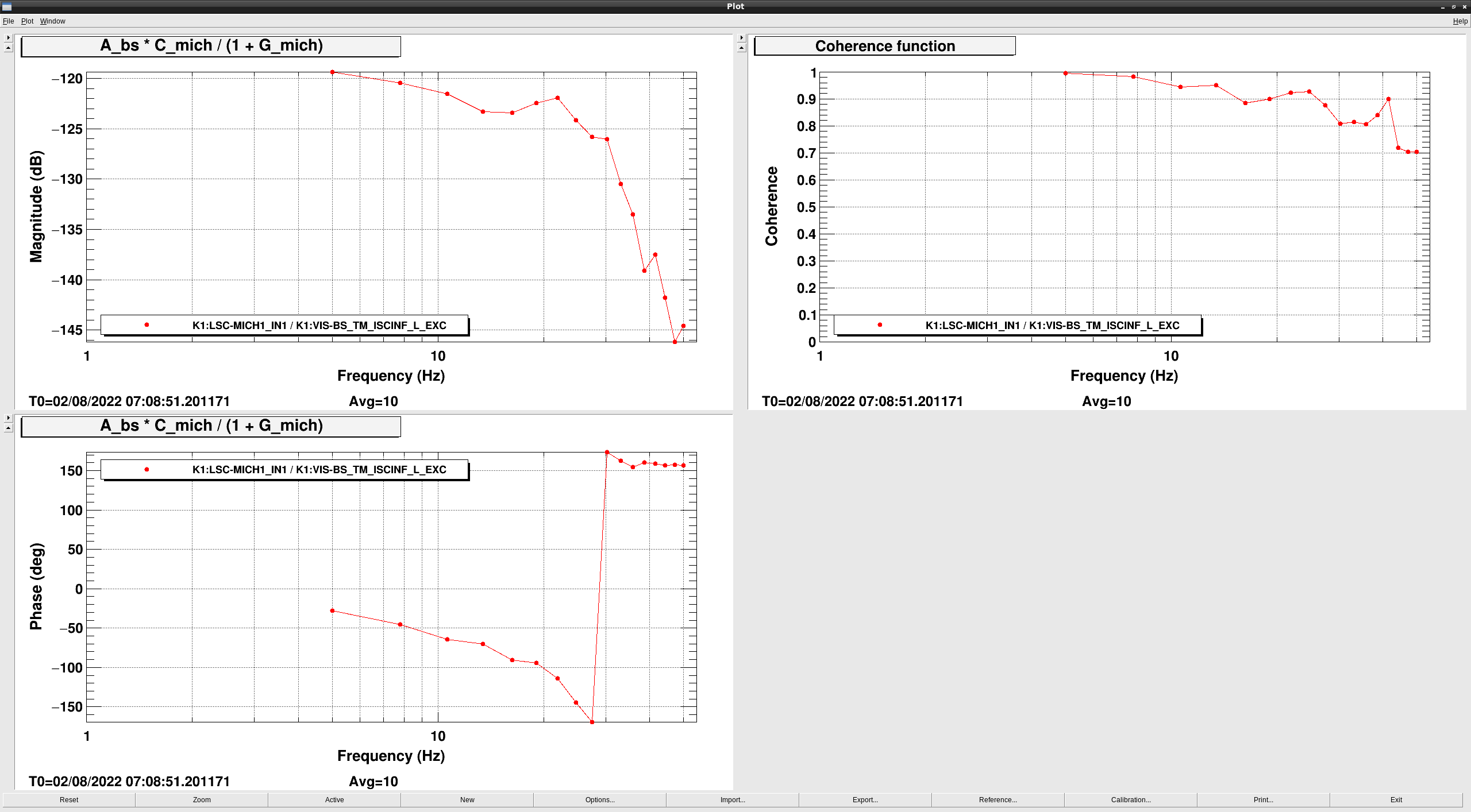
Next, we measured some transfer functions for estimating BS actuator efficiency.
TF from K1:VIS-BS_TM_ISCINF_L_OUT to K1:LSC-MICH_IN1_DQ shows the product of MICH optical gain and the actuator response. Measured value is ~1.2e-6 [ct/ct] @10Hz (See Fig.2).
As the result, BS actuator efficiency can be estimated as
5.9e-13 [ct/m] @10Hz (=1.2e-6 [ct/ct] @10Hz / 4.9e6 [ct/m] * 2.4).
In the observation band (above 10Hz), we can approximate as
5.9e-11 * f^{-2} [ct/m]
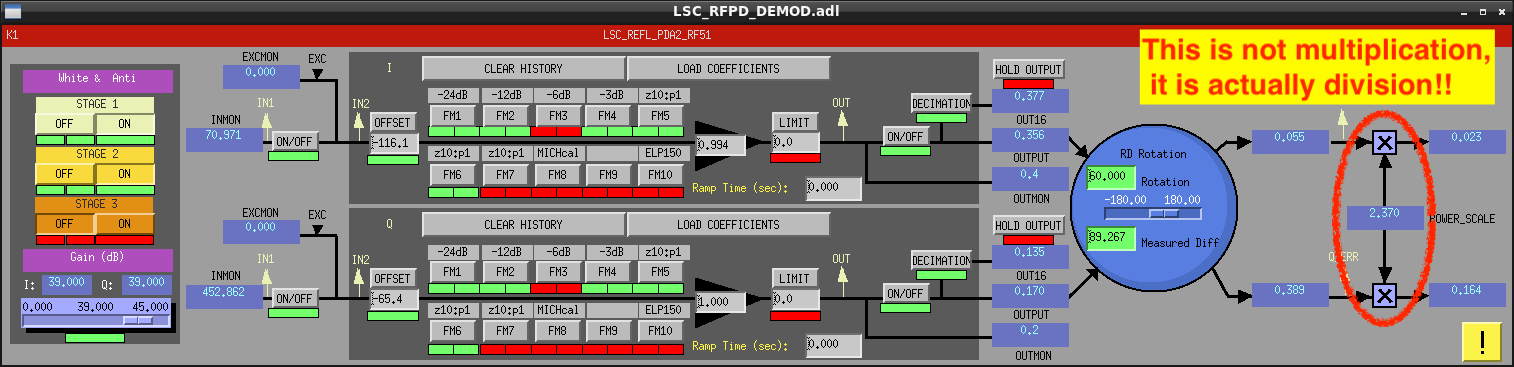
By the way, norm factor for PD signal seems to be multiplied to PD signal on the MEDM screen as shown in Fig.3.
However, it is actually divided on the real-time model.
Thanks to this confusing MEDM screen, I computed BS actuator efficiency as 1.0e-13 [ct/m] @10Hz (=1.2e-6@10Hz / 4.9e6 / 2.4) at first and spent wasted a few hours to check gain, filter modules etc. of all blocks on the MICH control loop.
-REFL1DC(16k).png)





-REFL1DC(16k).png){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}