Following H-infinity methods, I calculated the shape of the F0 sensor correction filter. I used the F0 LVDT noise and the upper limit of the seismic ground motion reported in klog 23507.
The description of the figures is as follows:
- LVDT noise transfer function model.
- Seismometer noise transfer function model.
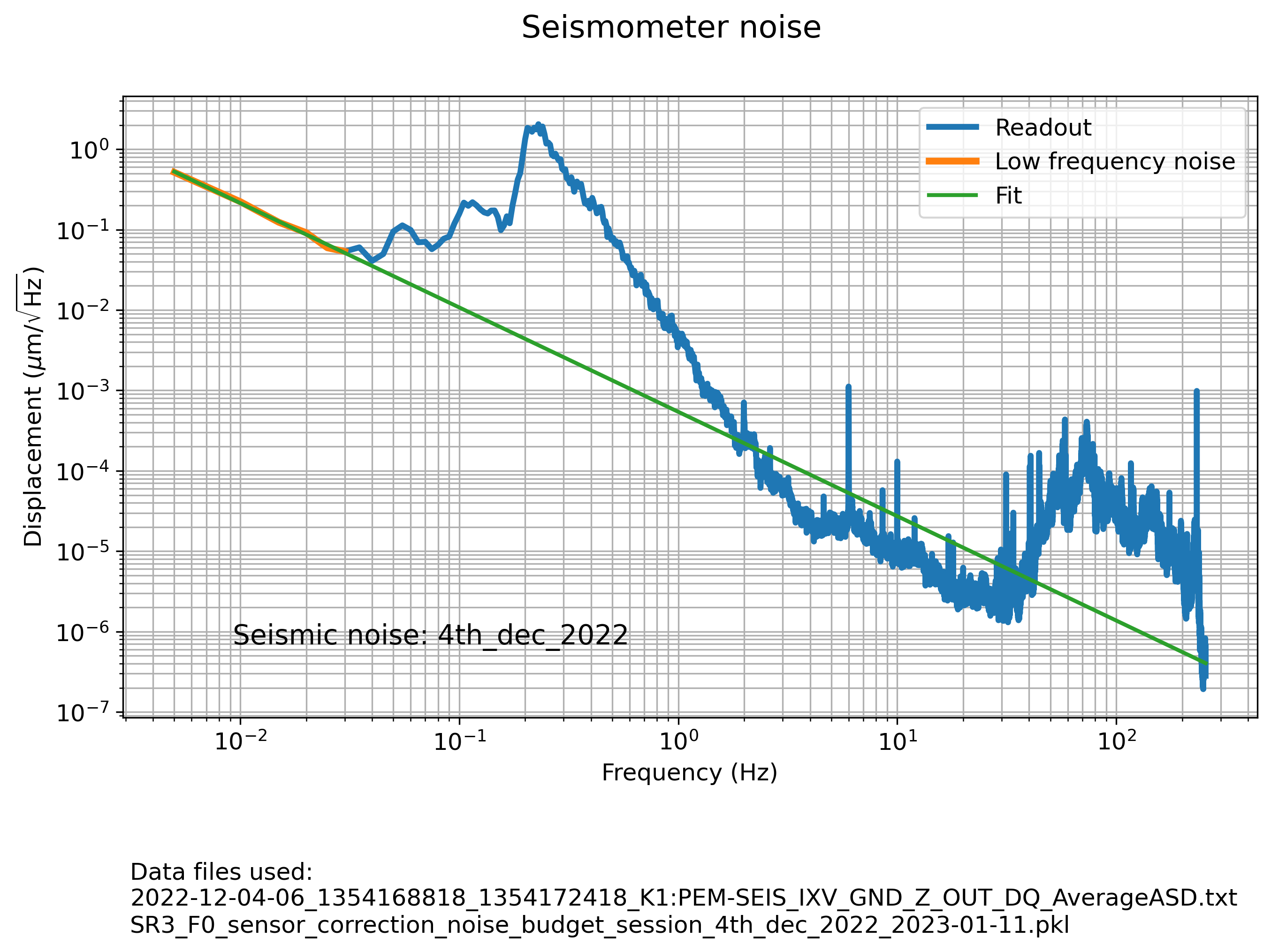
- Seismic noise transfer function model. It also shows the seismic noise processed for the noise budget calculation.
- Sensor correction filter synthesis. It shows the noises, the optimized filters and the sensor correction noise.
- Calculated uncorrected and corrected LVDT noise.
As shown in Fig. 5, the improvement of the corrected LVDT noise, with respect to the uncorrected one, is a factor of 10.
The Foton expression of the sensor correction filter is:
zpk([0.000467+i*0.000831;0.000467+i*-0.000831;0.00587388;0.003640+i*0.040495;0.003640+i*-0.040495;0.051338;0.046736+i*0.047732;0.046736+i*-0.047732;0.0866736;0.015139+i*0.097614;0.015139+i*-0.097614;0.152978;0.463531;1.87951;3.2481;2.87574e+06],[0.00135789;0.015222;0.003709+i*0.039889;0.003709+i*-0.039889;0.024955+i*0.046410;0.024955+i*-0.046410;0.050455+i*0.021623;0.050455+i*-0.021623;0.087169;0.011033+i*0.096770;0.011033+i*-0.096770;0.150737;0.463531;1.8852;3.2481;2.89285e+06],0.00748886,"n")
For my own reference, the session file name is SR3_F0_sensor_correction_synthesis_upper_limit_2023-01-10.pkl. I'll upload the Jupyter notebooks and data files later after the sensor correction campaign is finished.
The filter has not been written in any filter bank yet.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}