I calculated the intercalibration factor between the seismometer on the ground and the F0 LVDT, following the method described in entry 22998.
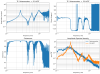
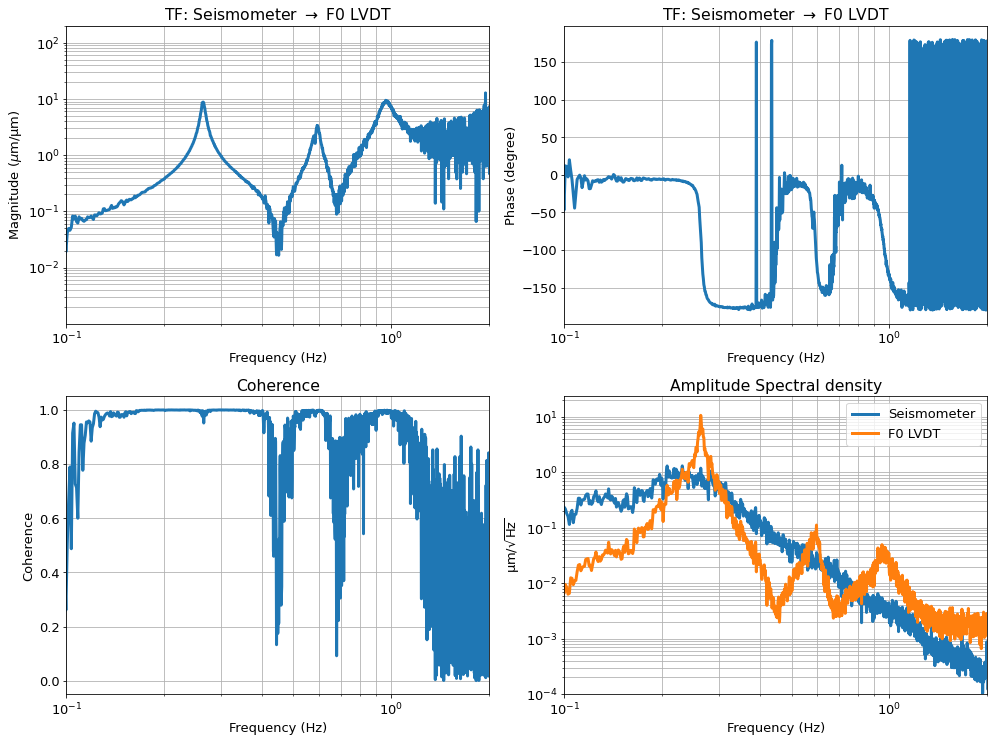
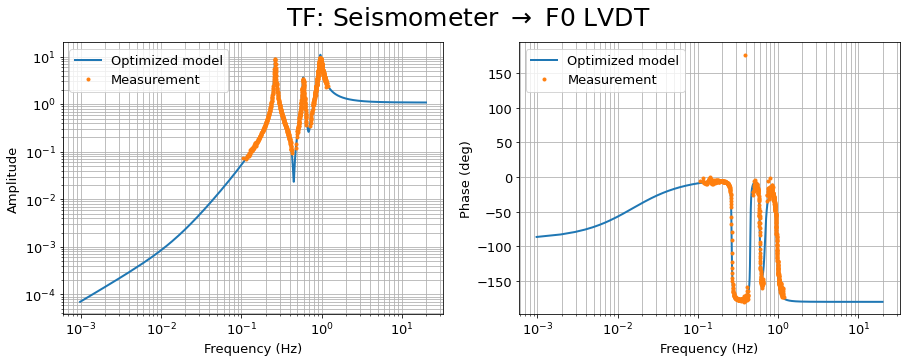
Fig. 1 shows the TF from the seismometer to the F0 LVDT, the coherence and the ASD of the readout of both devices. An advantageous feature of the F0 LVDT in SR3, is its high sensitivity, namely around 2 nm/rtHz above 1 Hz. This allows us to acquire information of the three peaks expected in the TF.
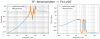
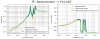
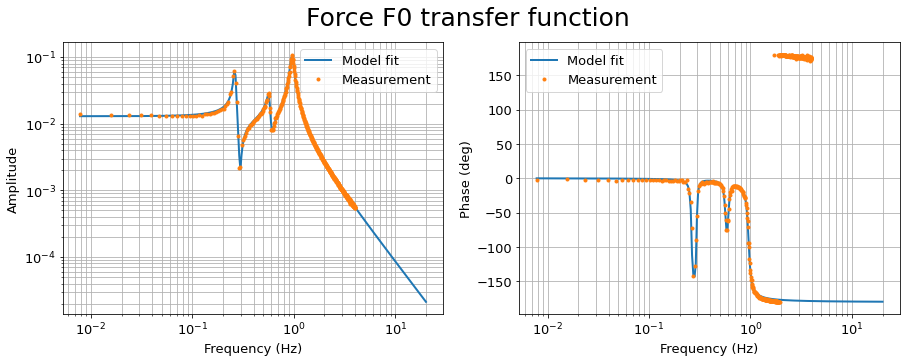
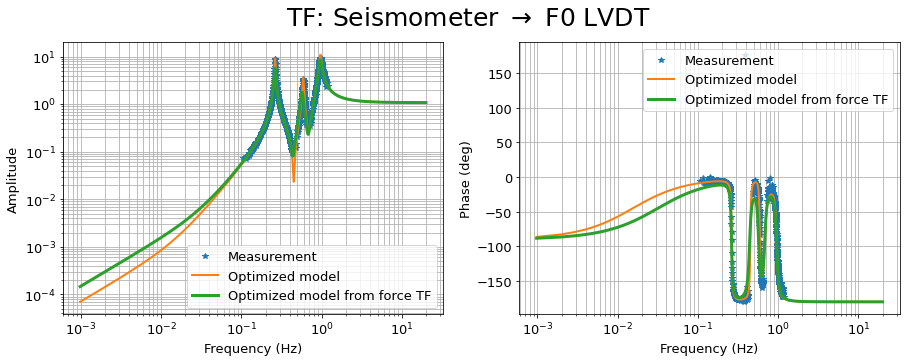
Fig. 2 shows the fit of a transfer function mathematical model to the measured data (see entry 22998). The data used was between 0.1 and 1.5 Hz with a coherence higher than 0.95. In the script, I used the seismometer readout in units of velocity and without a sensor correction filter.
The value of the intercalibration factor, that must multiply the seismometer readout, is a = 1.0838.
This is information on the Jupyter notebook I used:
- File name: seismometer_F0_lvdt_intercalibration.ipynb
- Directory: /kagra/Dropbox/Subsystems/VIS/vis_commissioning/sr3/IP_diag/SENS_corre/Vertical/notebooks/
- Conda environment: vishack.
- Diaggui file: sr3_seis2f0_tf_ol_221130.xml


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}