OBS (Summary)hiromi.yasui - 17:16 Saturday 05 July 2025 (34473)
Print this reportOperation Shift Summary
Operators: Hido, Yasui
Shift time: 9:00-17:00 JST
Check Items: There was no issue on the regular check of VAC, CRY, and TEMP.
(Ikeda-san’s script for comparing cryocooler temperatures was very helpful!)
IFO state (JST):
9:00 OBSERVING
12:33 LOCKLOSS
(While recovering the IFO, there was an earthquake near the Tokara Islands around 12:50.)
13:45 OBSERVING
17:00 OBSERVING
OBS (General)takahiro.sawada - 20:16 Friday 04 July 2025 (34472)
Print this reportComment to Set observing bit (34099)We turned on the OBS INTENT around 18:53 JST, after Friday CAL.
OBS (SDF)takahiro.yamamoto - 19:09 Friday 04 July 2025 (34469)
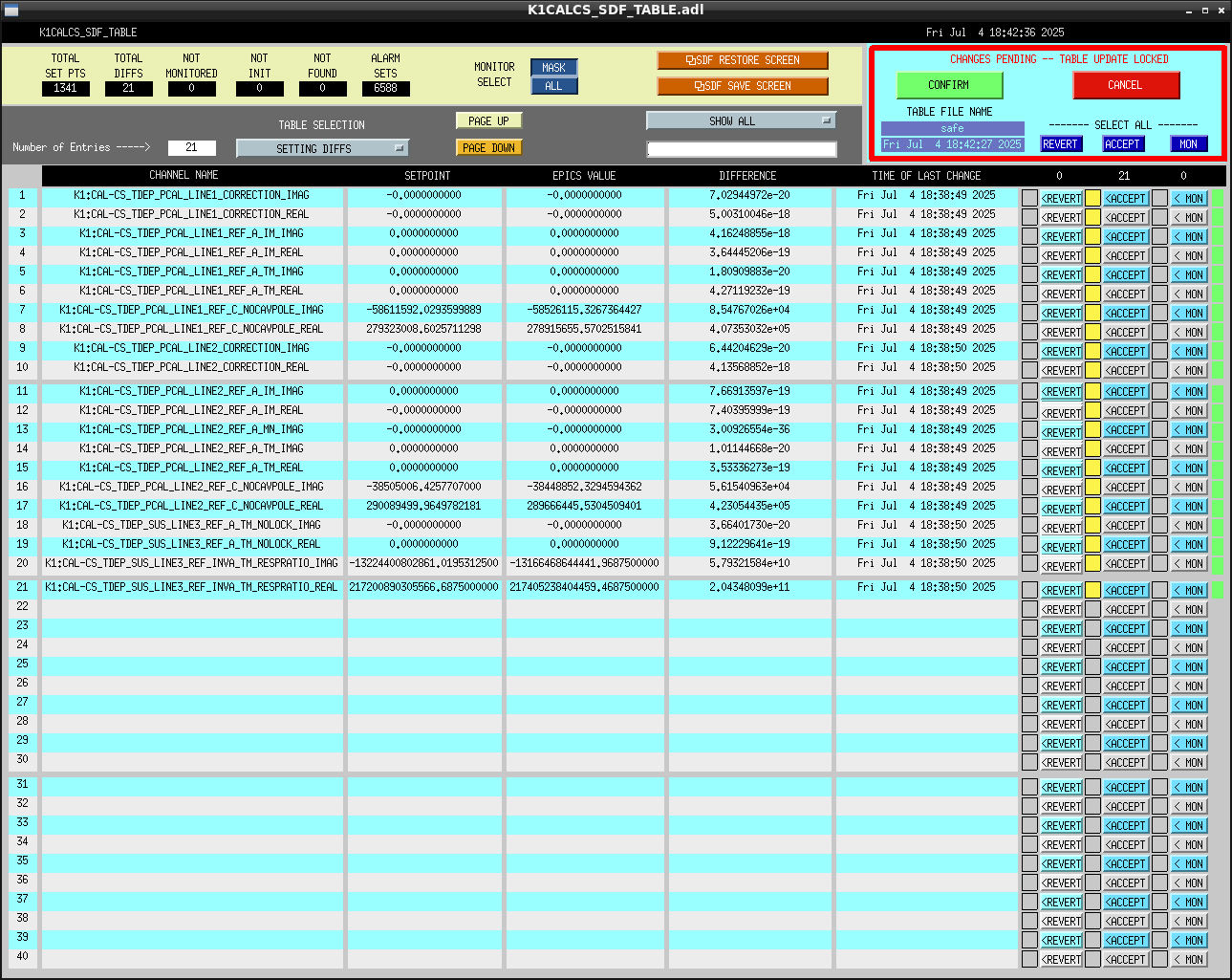
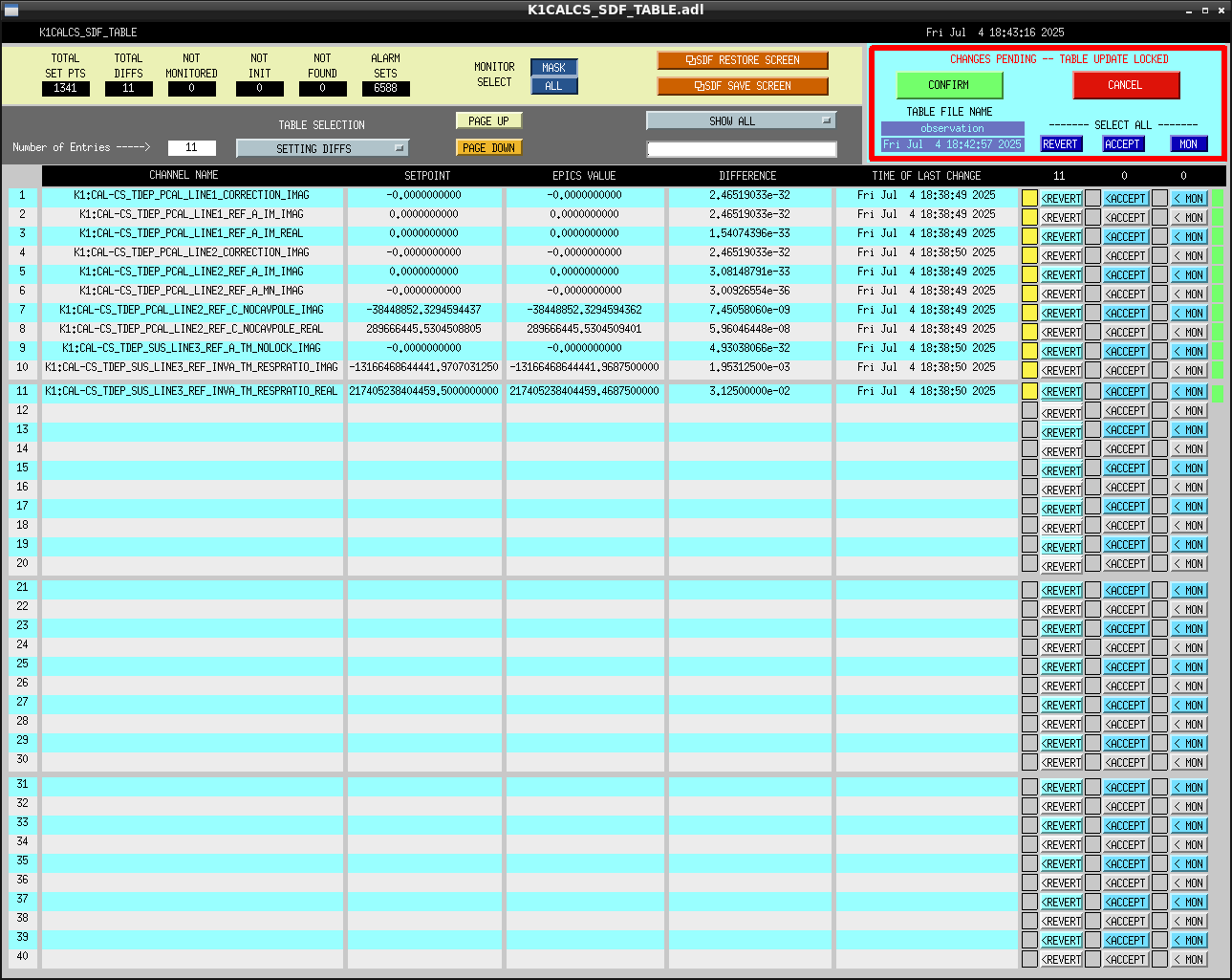
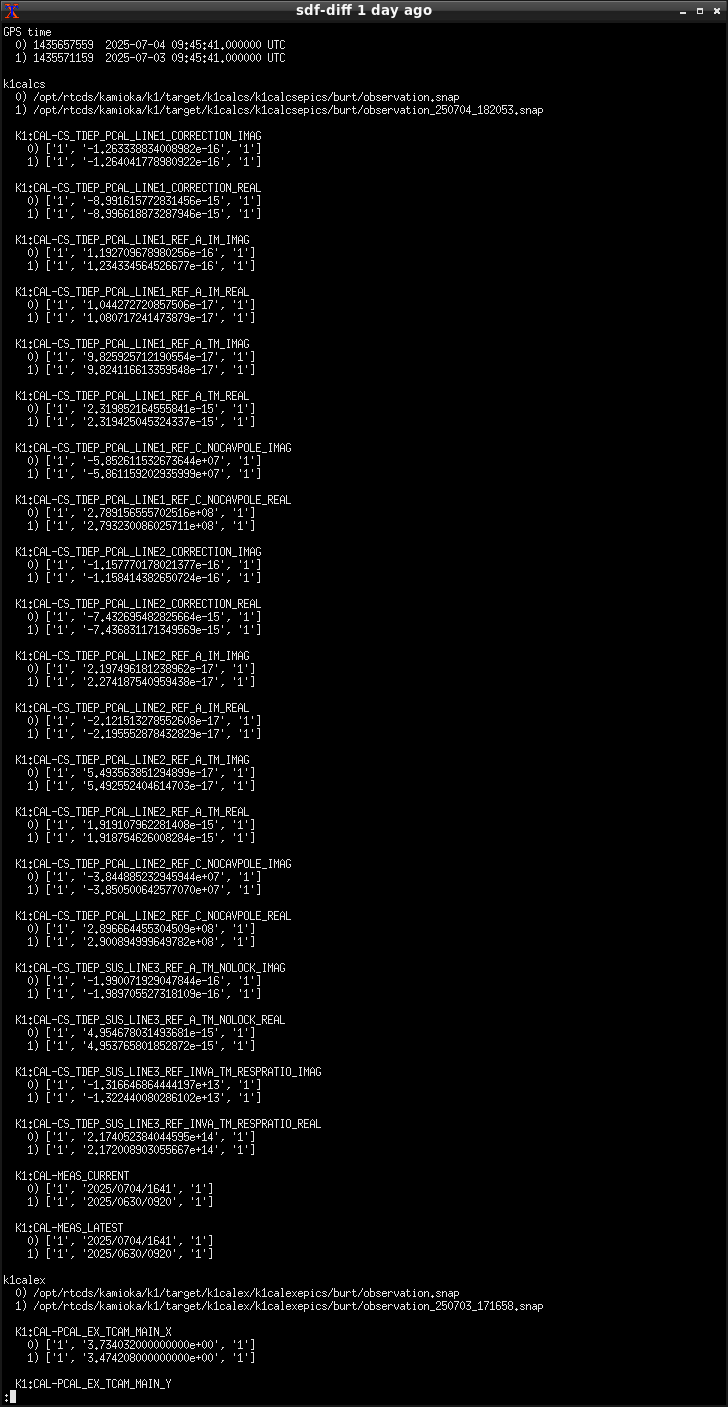
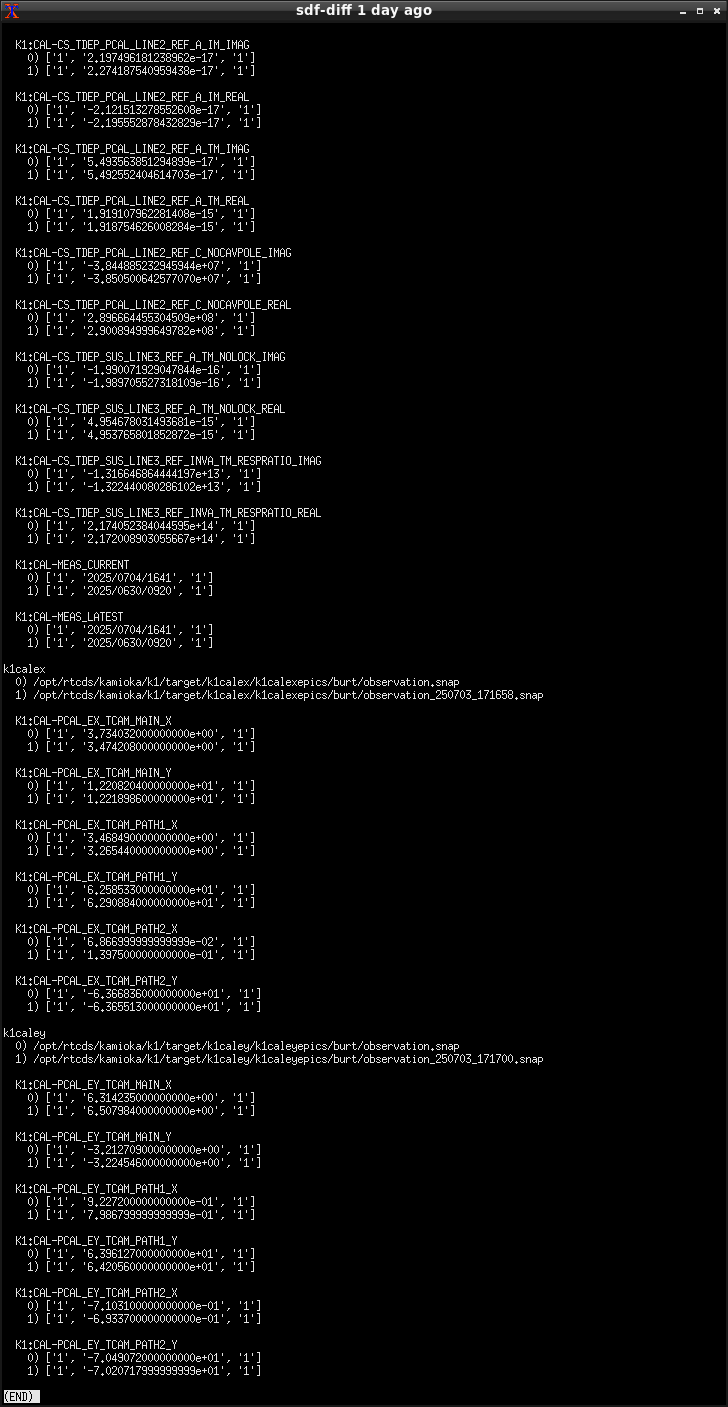
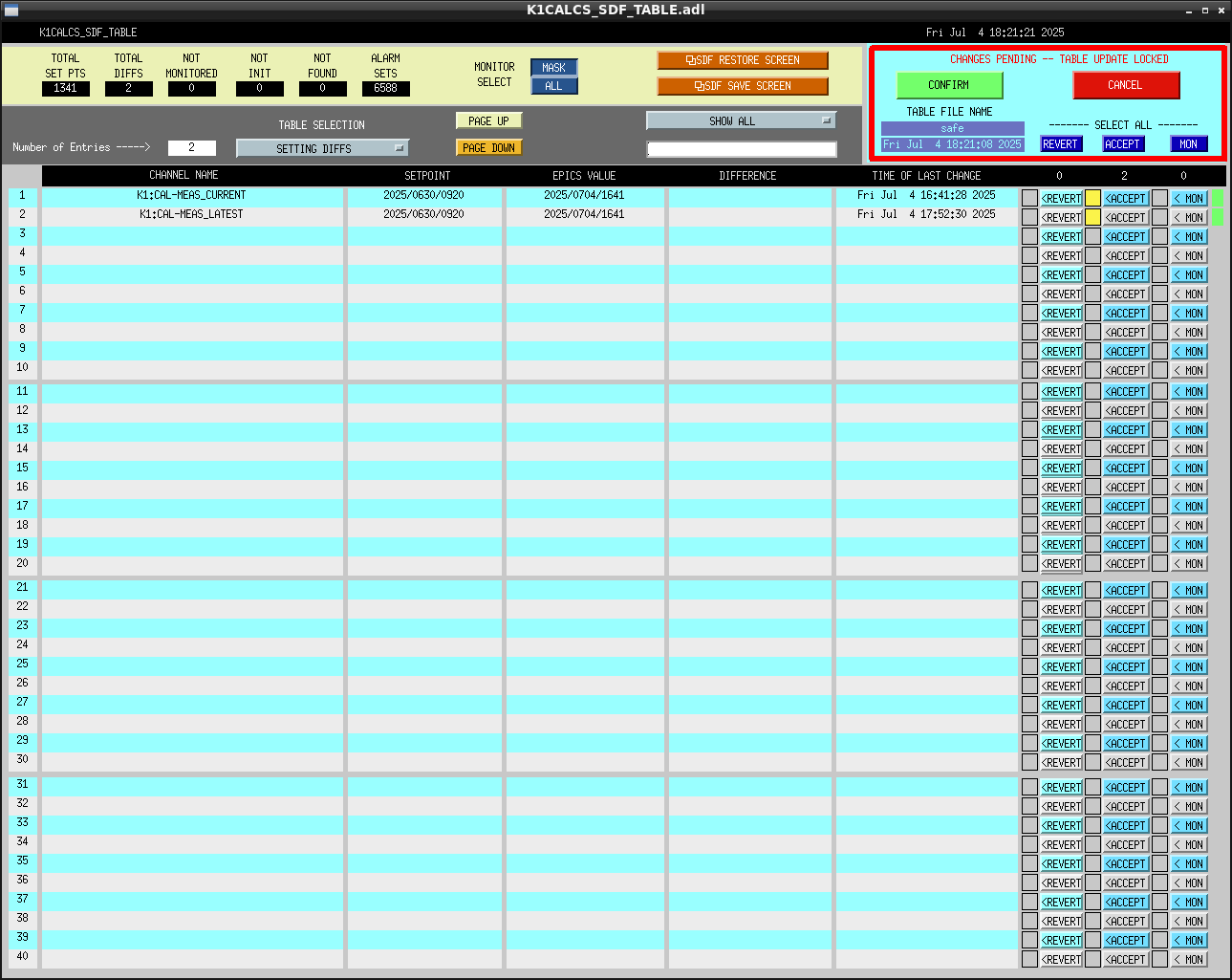
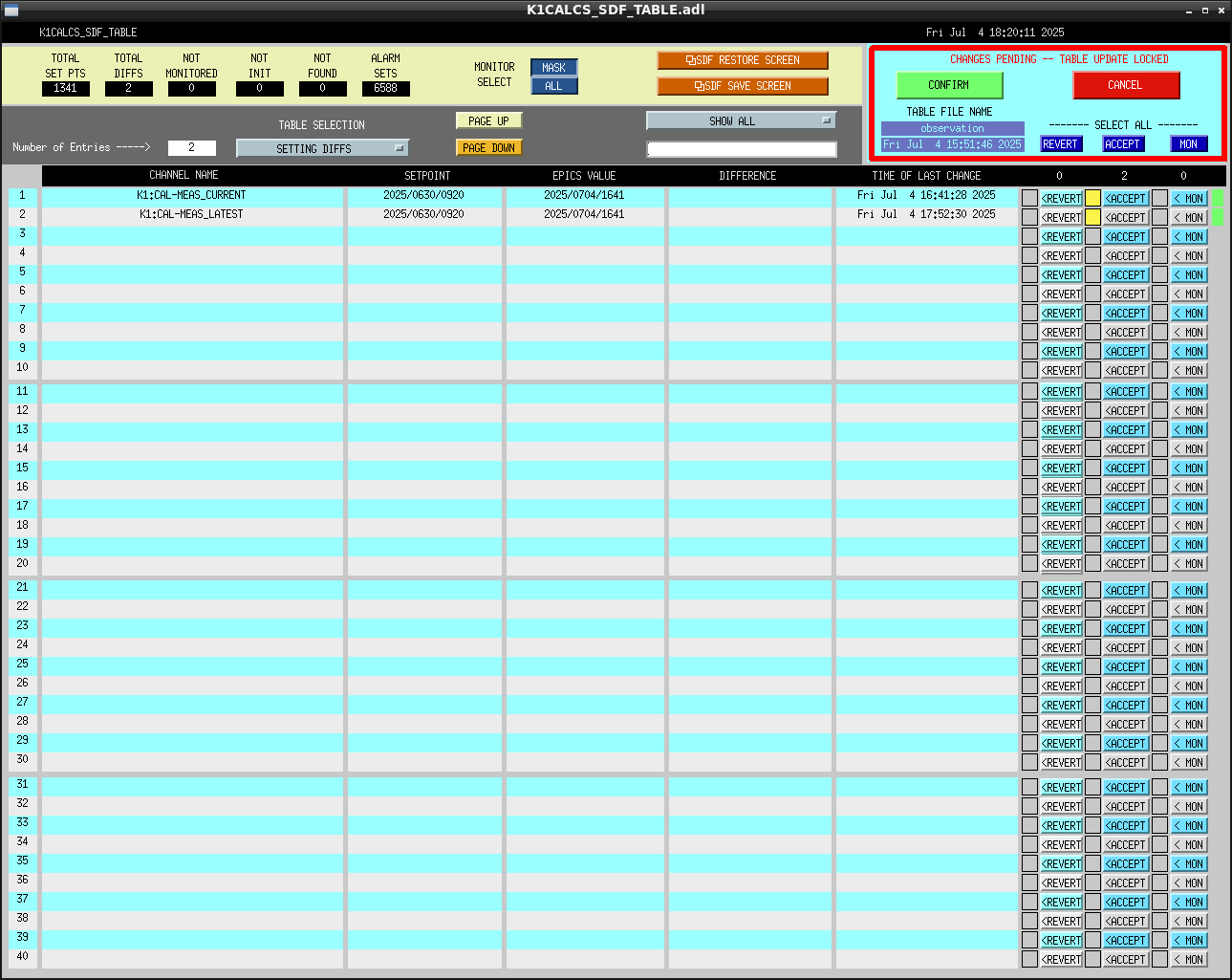
Print this reportComment to Changes of observation.snap during O4c (34169)
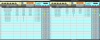
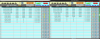
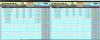
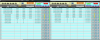
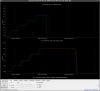
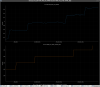
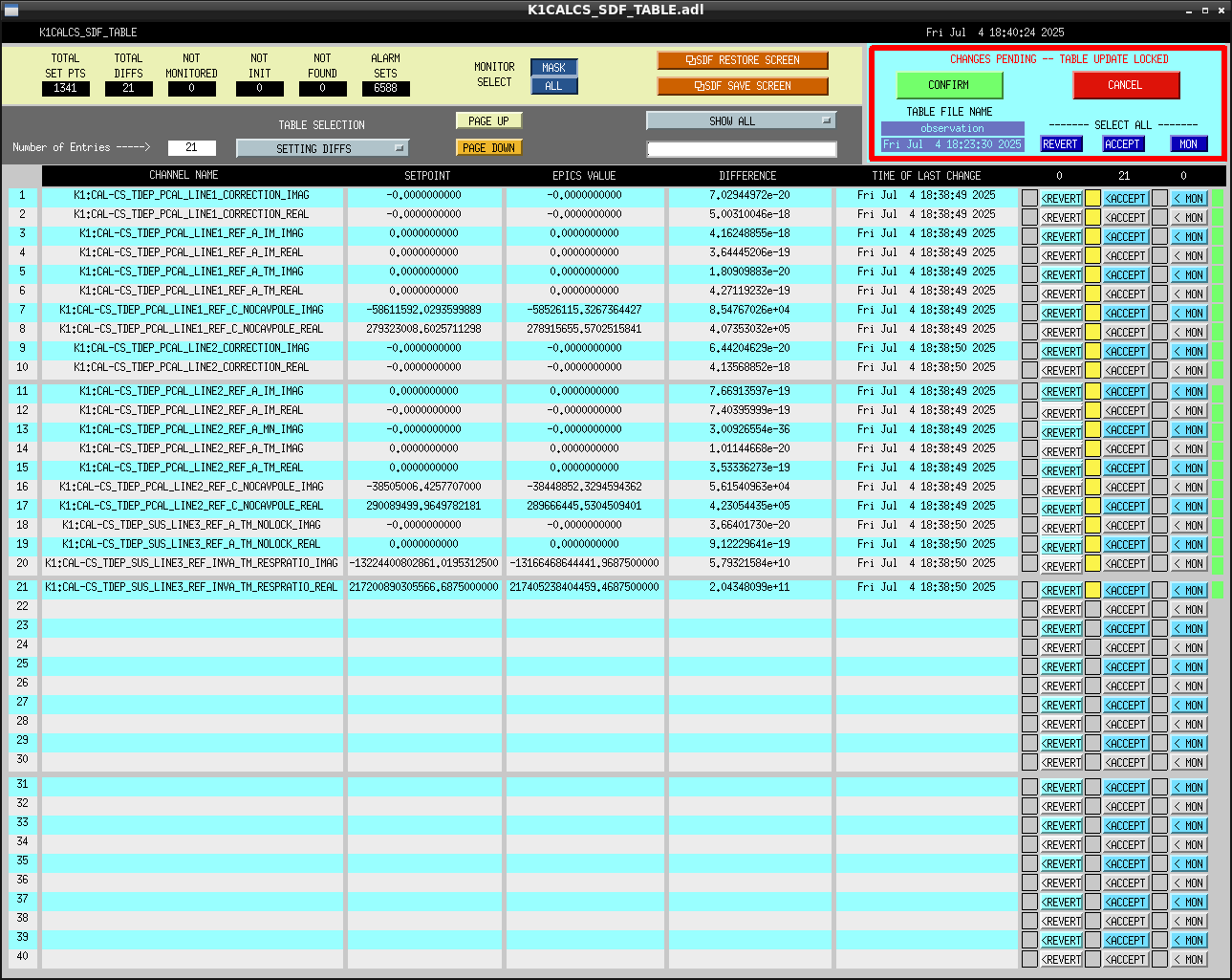
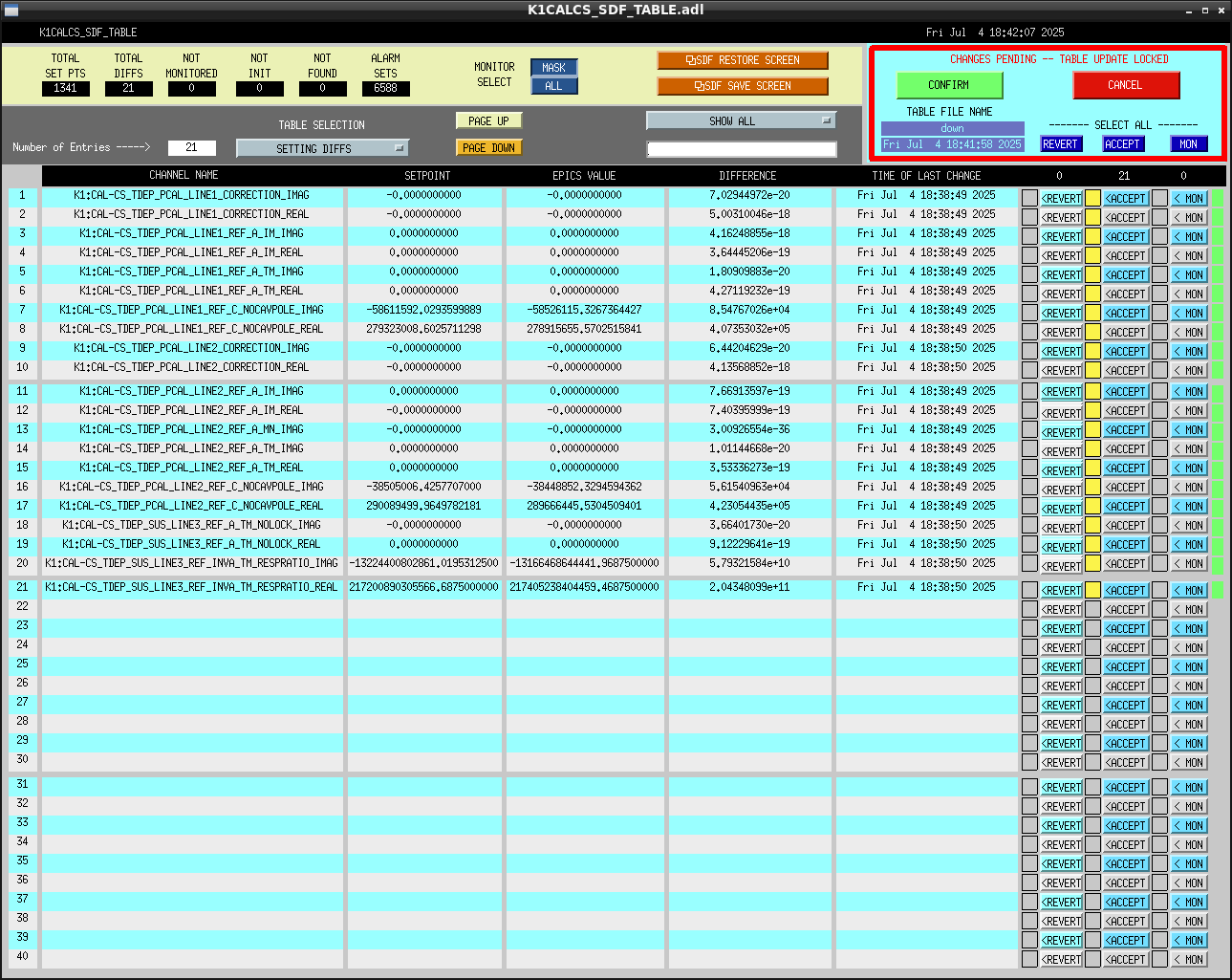
It's related to klog#34468 They were updated based on the latest value of optical gain of DARM and ETMX actuator efficiencies in klog#34466.
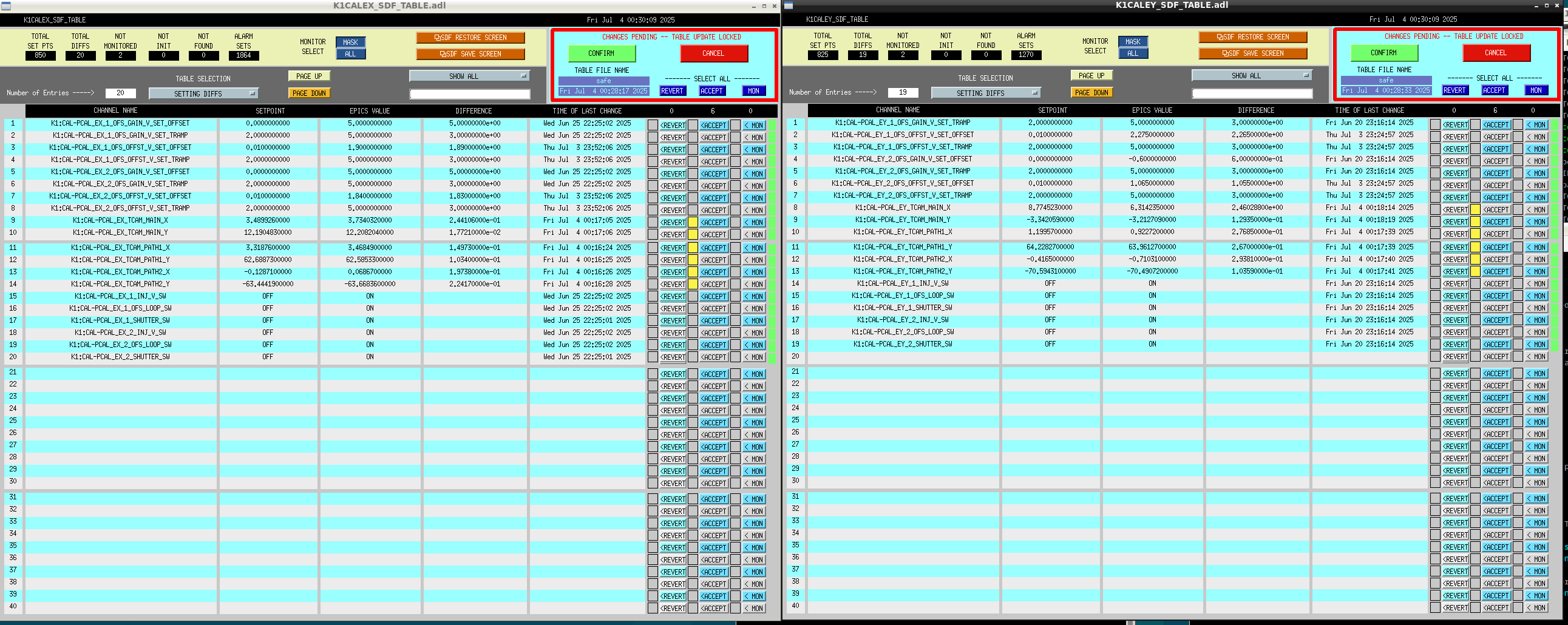
Changes were accepted on observation.snap (Fig.1), down.snap (Fig.2), and safe.snap (Fig.3). Finally, numerical rounding errors were reverted after re-loading observation.snap as shown in Fig.4.
Images attached to this comment
CAL (General)takahiro.yamamoto - 19:08 Friday 04 July 2025 (34468)
Print this reportComment to Weekly calibration on 7/4 (34466)
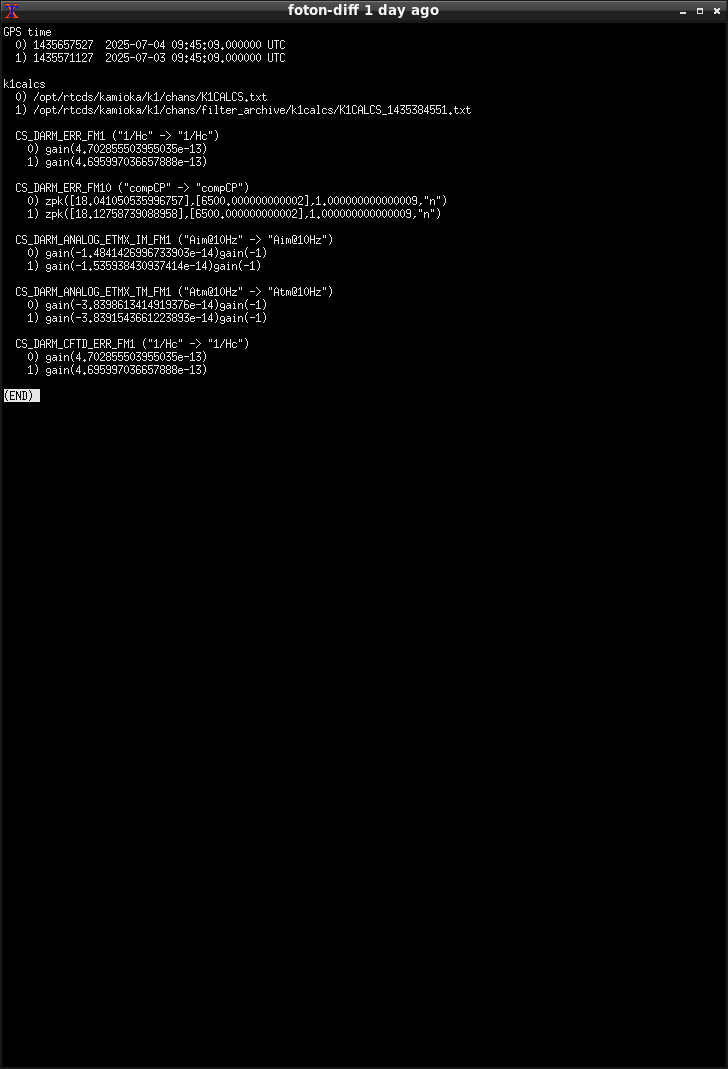
I updated line tracking parameters (JGW-L2314962).
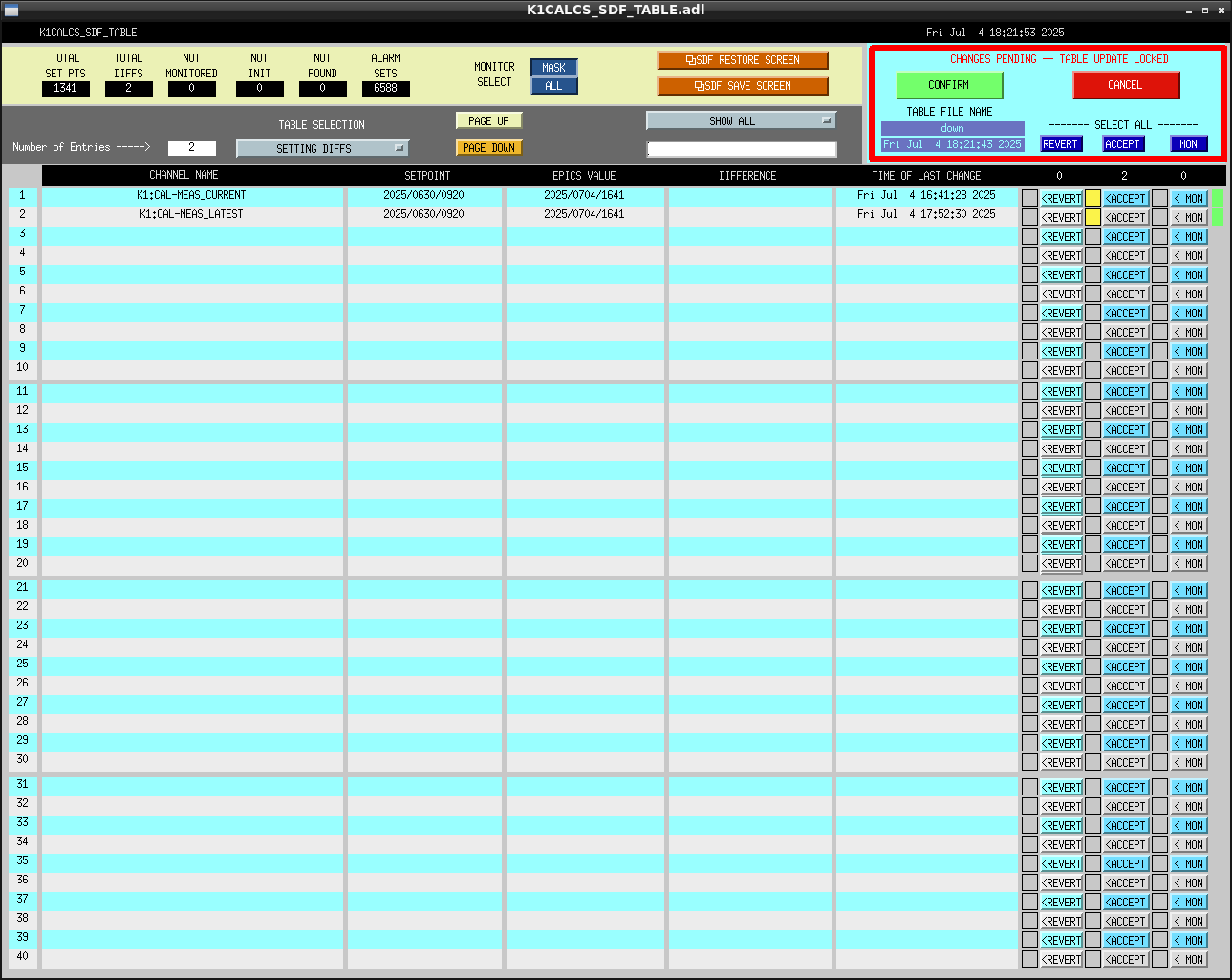
All detected changes are coming from the planned commissioning activities. - Chagens in foton Fig.1 are related to klog#34466 (k1calcs). - No changes in guardian (Fig.2). - Changes in SDF tables shown in Fig.3-4 are related to this klog#34467, klog#34469 (k1calcs), and klog#34464 (k1calex, k1caley). - No changes in the model (Fig.5).
Finally, I raised CFC_LACTCH and IFO guardian moved from CALIB_NOT_READY to READY.
Images attached to this comment
CAL (General)Shingo Hido - 18:28 Friday 04 July 2025 (34466)
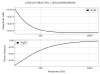
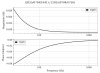
Print this reportWeekly calibration on 7/4
CAL group
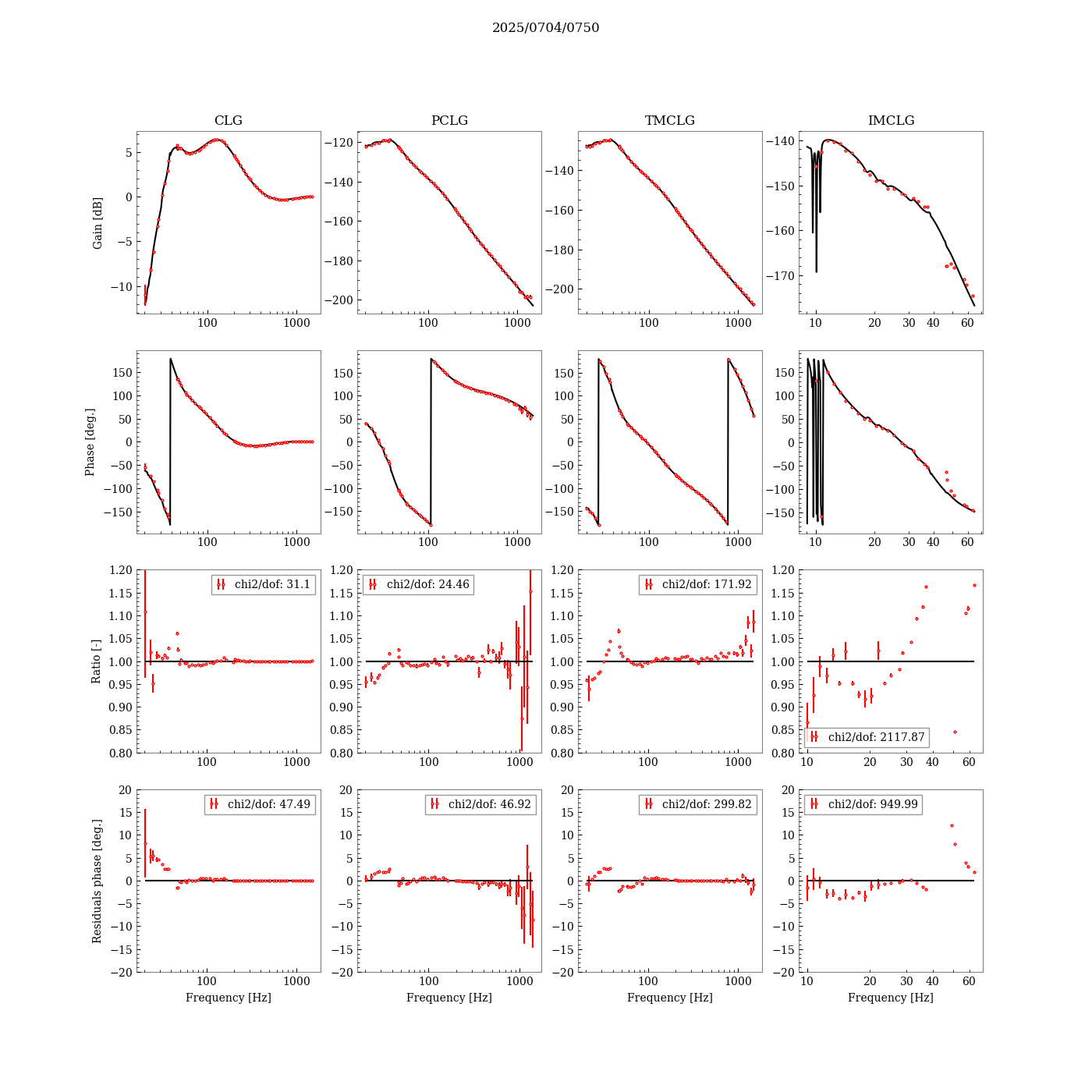
We did the calibration measurements and update the prameters.
Estimated parameters in the Pre-maintenance measurements are as follows. H_etmxtm = 3.840823152e-14@10Hz ( 0.04% from previous measurements) H_etmxim = 1.546766367e-14@10Hz ( 0.70% from previous measurements) Optical_gain = 2.114710228e12 ( -0.69% from previous measurements) Cavity_pole = 18.100765775 Hz ( -0.15% from previous measurements)
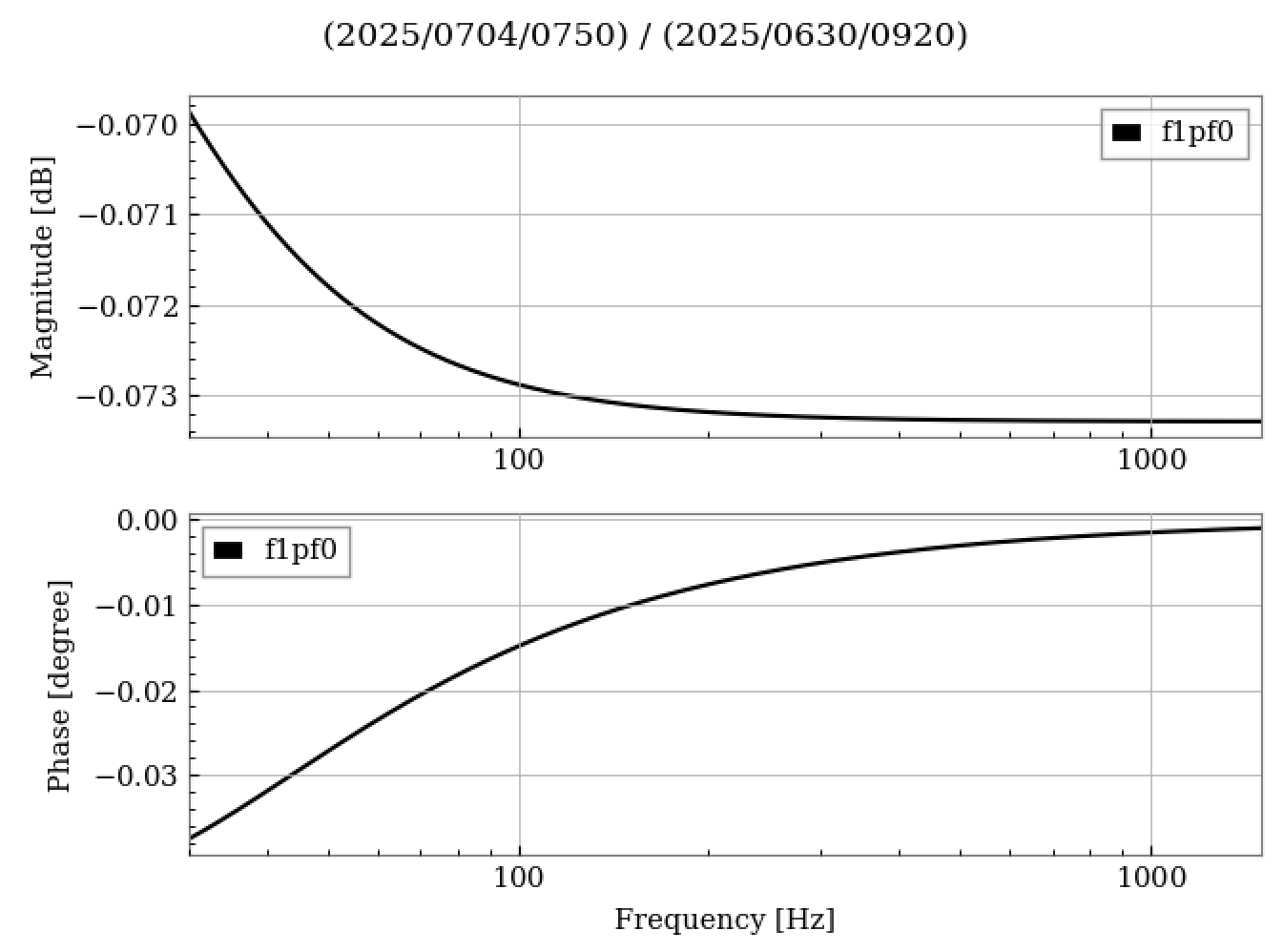
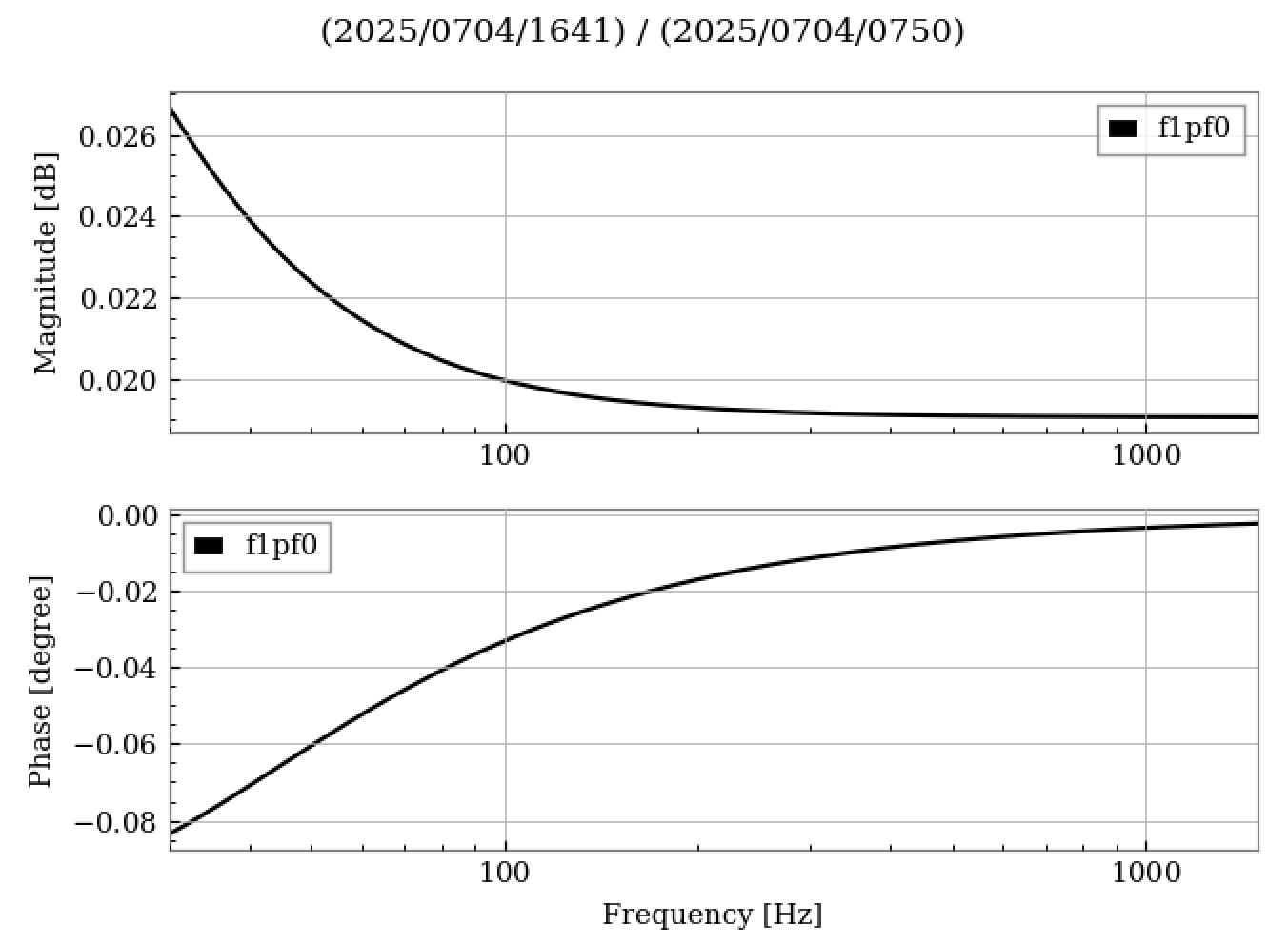
Fig. 2 and Fig.4 shows the ratio of the sensing functions estimated.
Estimated parameters in the Post-maintenance measurements are as follows. H_etmxtm = 3.839861341e-14 @10Hz ( -0.03% from pre-maintenance measurements) H_etmxim = 1.484142700e-14@10Hz ( -4.05 % from pre-maintenance measurements) Optical_gain = 2.126367691e12 ( 0.55 % from pre-maintenance measurements) Cavity_pole = 18.041050536 Hz ( -0.33% from pre-maintenance measurements)
Images attached to this report
Comments to this report:
takahiro.yamamoto - 19:08 Friday 04 July 2025 (34468)
Print this report
I updated line tracking parameters (JGW-L2314962).
All detected changes are coming from the planned commissioning activities. - Chagens in foton Fig.1 are related to klog#34466 (k1calcs). - No changes in guardian (Fig.2). - Changes in SDF tables shown in Fig.3-4 are related to this klog#34467, klog#34469 (k1calcs), and klog#34464 (k1calex, k1caley). - No changes in the model (Fig.5).
Finally, I raised CFC_LACTCH and IFO guardian moved from CALIB_NOT_READY to READY.
Images attached to this comment
OBS (SDF)dan.chen - 18:25 Friday 04 July 2025 (34467)
Print this reportComment to Changes of observation.snap during O4c (34169)
k1calcs
I accepted the following SDFs in observation.snap, down.snap, and safe.snap. This is caused by calibration measurements.
Images attached to this comment
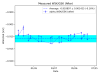
CAL (Pcal general)dan.chen - 17:32 Friday 04 July 2025 (34465)
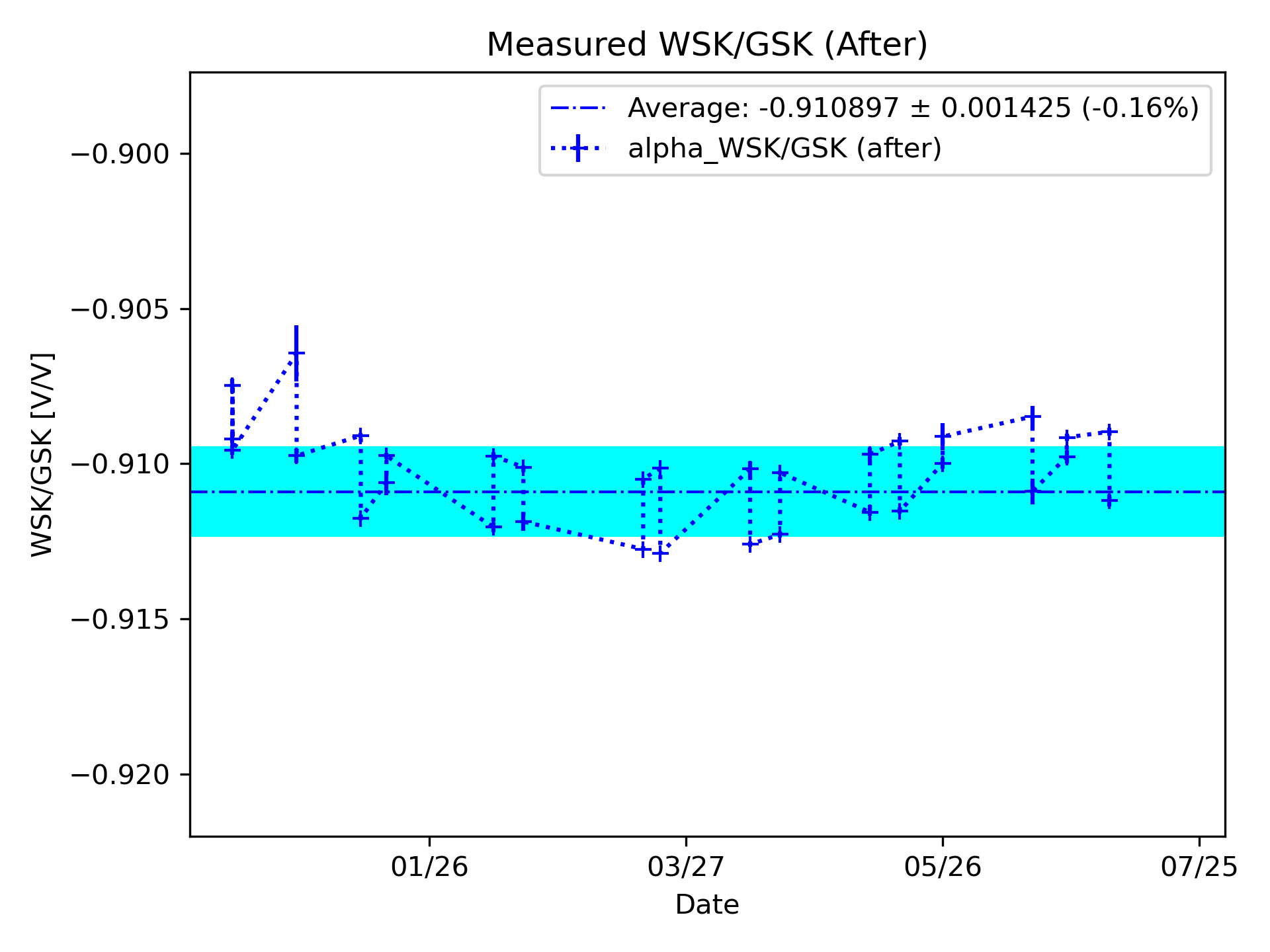
Print this reportWSK calibration at UToyama
Date: 2025/07/04
Member: Misato Onishi, Keisuke Sakanoue
We performed our usual WSK calibration at UToyama.
The results look no problem.
Results
Case
Alpha (Main Value)
Alpha (Uncertainty)
Front WSK, Back GSK
-0.911184
0.000188
Front GSK, Back WSK
-0.908968
0.000122
Comparison with Previous Results
Comparing with previous results, no significant issues were found. Attached graph is the result summary including the latest measured data.
Images attached to this report
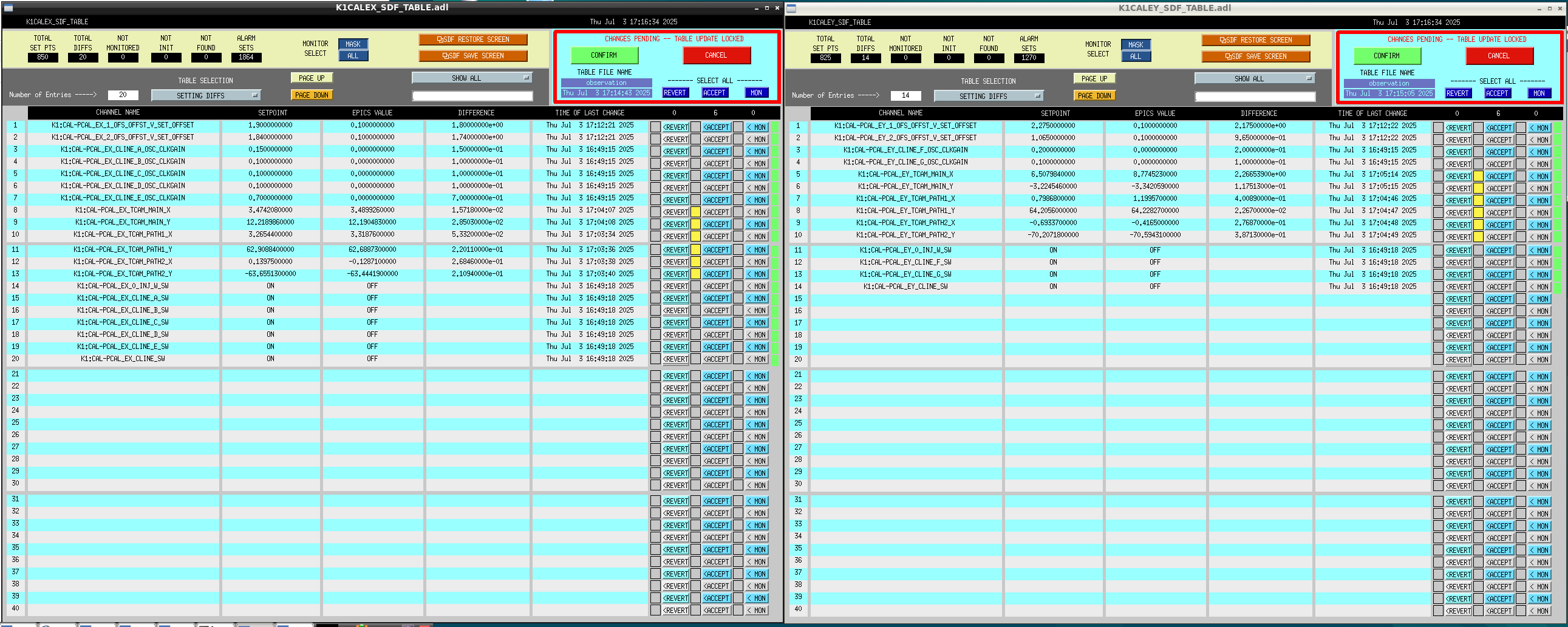
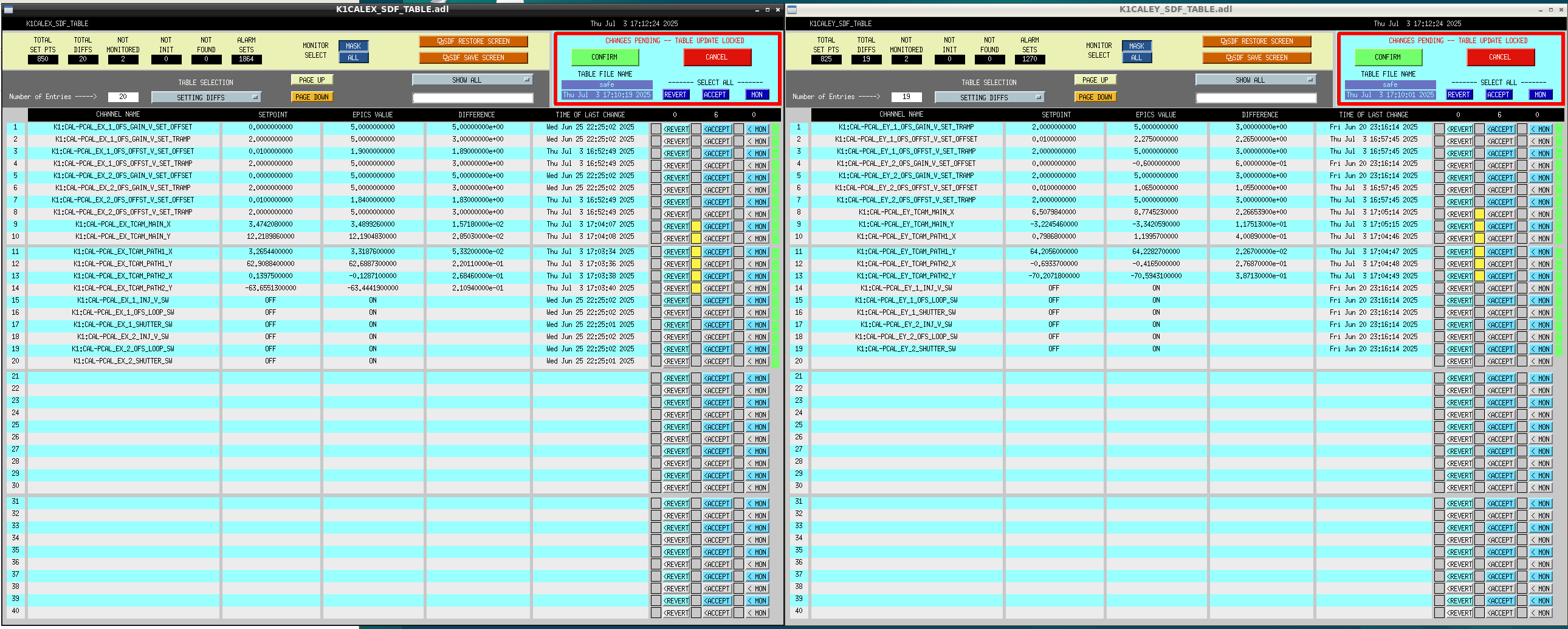
OBS (SDF)dan.chen - 16:40 Friday 04 July 2025 (34464)
Print this reportComment to Changes of observation.snap during O4c (34169)
CAL (Pcal general)dan.chen - 16:38 Friday 04 July 2025 (34463)
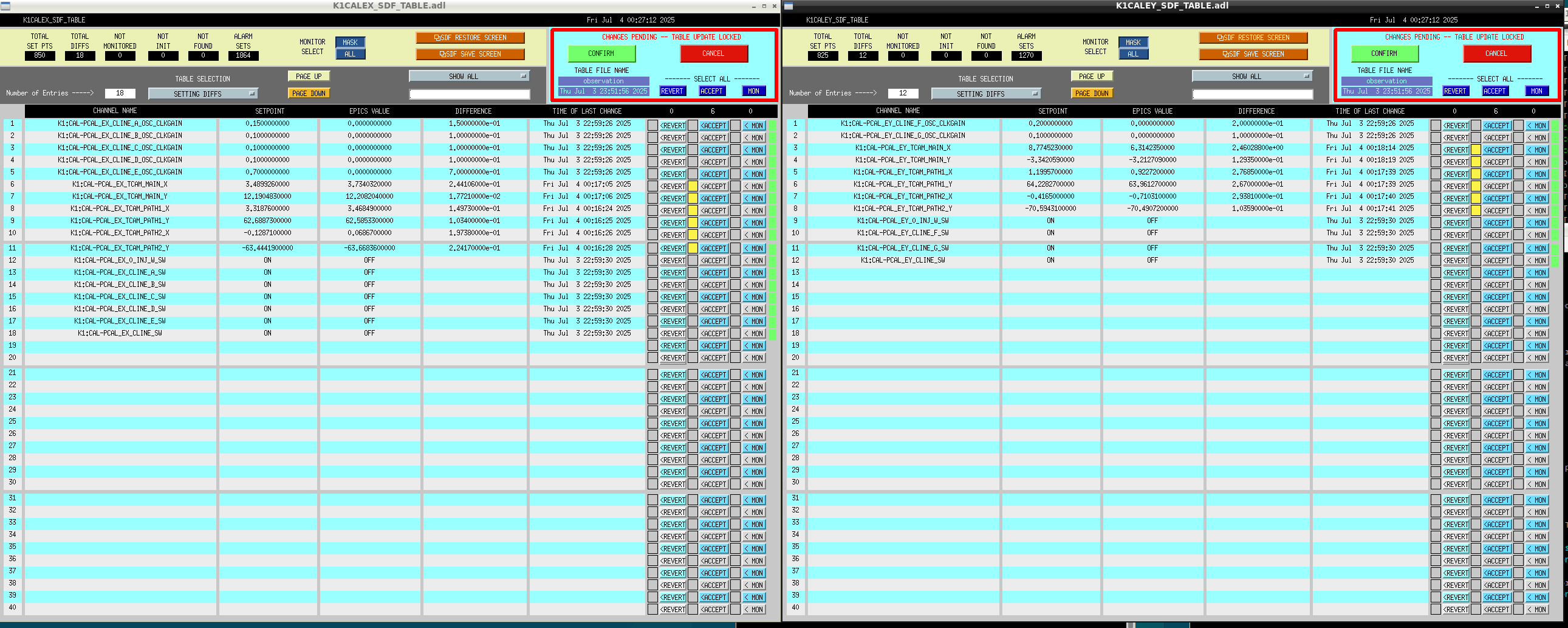
Print this reportPcal Parameter Update Report
A CAL Tcam session was performed to obtain beam position information necessary for Pcal. The parameters have already been updated, and SDF has alreadly been accepted.
Operator: Shingo Hido, DanChen
Update Time: 2025/07/04 16:16:28
EPICS Key
Before [mm]
After [mm]
Δ (After - Before) [mm]
K1:CAL-PCAL_EX_TCAM_PATH1_X
3.31876 mm
3.46849 mm
+0.14973 mm
K1:CAL-PCAL_EX_TCAM_PATH1_Y
62.68873 mm
62.58533 mm
-0.10340 mm
K1:CAL-PCAL_EX_TCAM_PATH2_X
-0.12871 mm
0.06867 mm
+0.19738 mm
K1:CAL-PCAL_EX_TCAM_PATH2_Y
-63.44419 mm
-63.66836 mm
-0.22417 mm
Update Time: 2025/07/04 16:17:06
EPICS Key
Before [mm]
After [mm]
Δ (After - Before) [mm]
K1:CAL-PCAL_EX_TCAM_MAIN_X
3.48993 mm
3.73403 mm
+0.24411 mm
K1:CAL-PCAL_EX_TCAM_MAIN_Y
12.19048 mm
12.20820 mm
+0.01772 mm
Update Time: 2025/07/04 16:17:41
EPICS Key
Before [mm]
After [mm]
Δ (After - Before) [mm]
K1:CAL-PCAL_EY_TCAM_PATH1_X
1.19957 mm
0.92272 mm
-0.27685 mm
K1:CAL-PCAL_EY_TCAM_PATH1_Y
64.22827 mm
63.96127 mm
-0.26700 mm
K1:CAL-PCAL_EY_TCAM_PATH2_X
-0.41650 mm
-0.71031 mm
-0.29381 mm
K1:CAL-PCAL_EY_TCAM_PATH2_Y
-70.59431 mm
-70.49072 mm
+0.10359 mm
Update Time: 2025/07/04 16:18:19
EPICS Key
Before [mm]
After [mm]
Δ (After - Before) [mm]
K1:CAL-PCAL_EY_TCAM_MAIN_X
8.77452 mm
6.31424 mm
-2.46029 mm
K1:CAL-PCAL_EY_TCAM_MAIN_Y
-3.34206 mm
-3.21271 mm
+0.12935 mm
CAL (General)dan.chen - 16:17 Friday 04 July 2025 (34462)
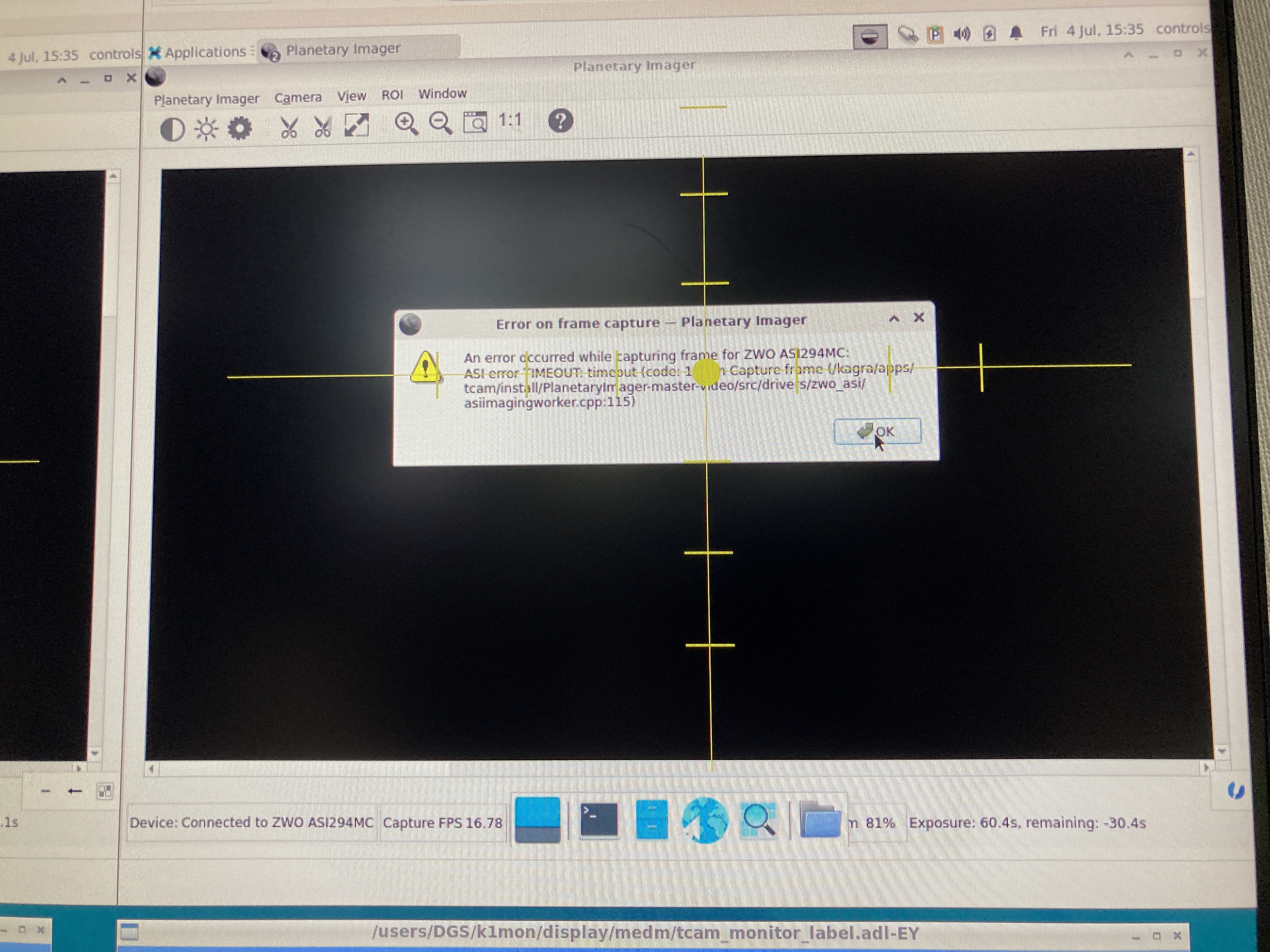
Print this reportEYA Tcam Stoppage During Pcal Tcam Session
With Shingo Hido, Hirotaka Yuzurihara
This afternoon, during the Pcal Tcam session, the EYA Tcam stopped and could not capture images. An error message was displayed on the screen: "An error occurred while capturing frame for ZWO ASI294MC."
As a countermeasure, "Recovery" and "Force" under the "Recovery" menu were executed, but a GRD timeout error occurred and recovery was unsuccessful. After manually setting the GRD to "DOWN," executing "Recovery" - "Recovery" restored normal operation.
If the same error occurs in the future, setting the GRD to "DOWN" before attempting recovery may be an effective procedure.
Images attached to this report
FCL (Electricity)nobuhiro.kimura - 14:03 Friday 04 July 2025 (34461)
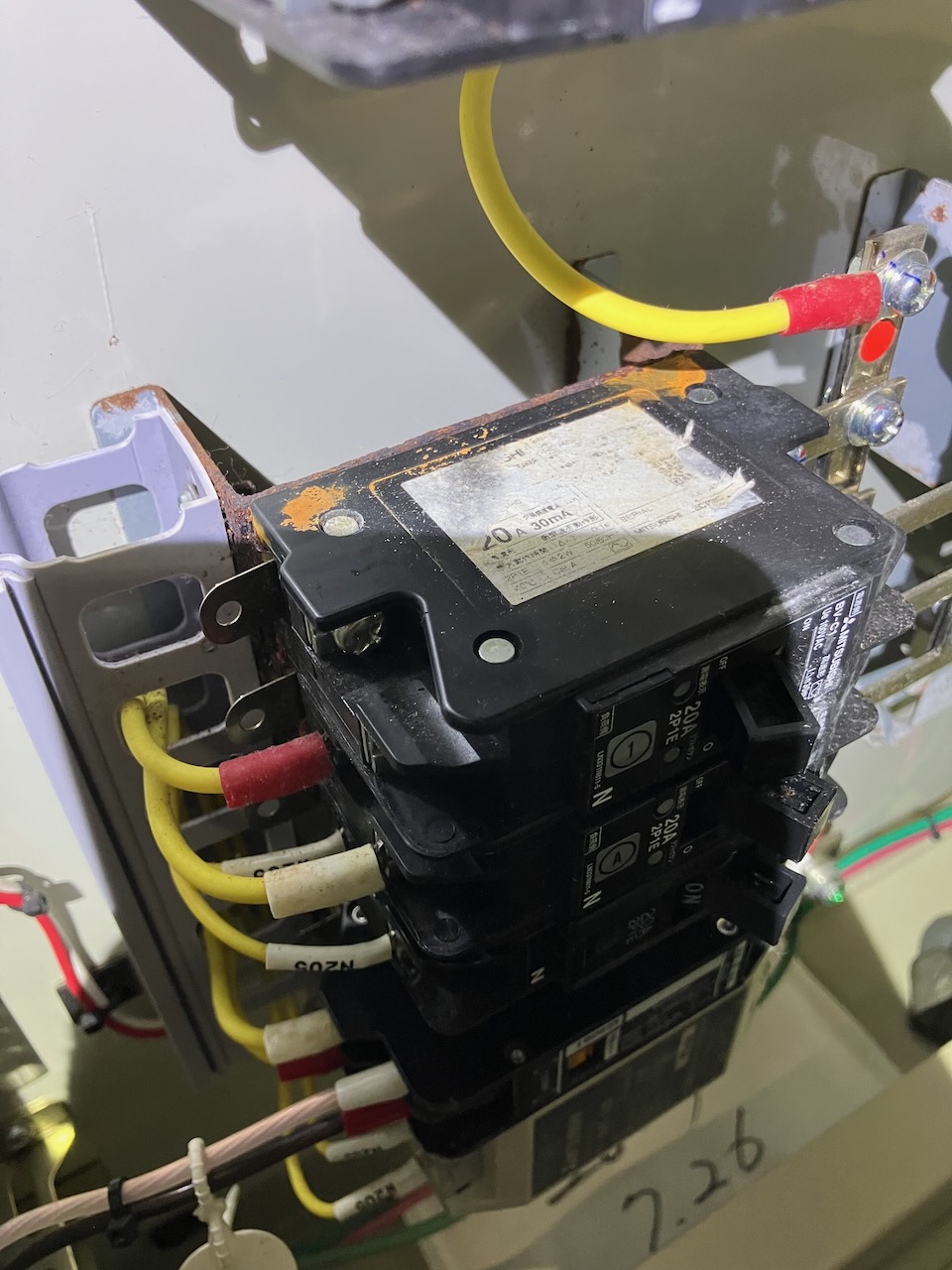
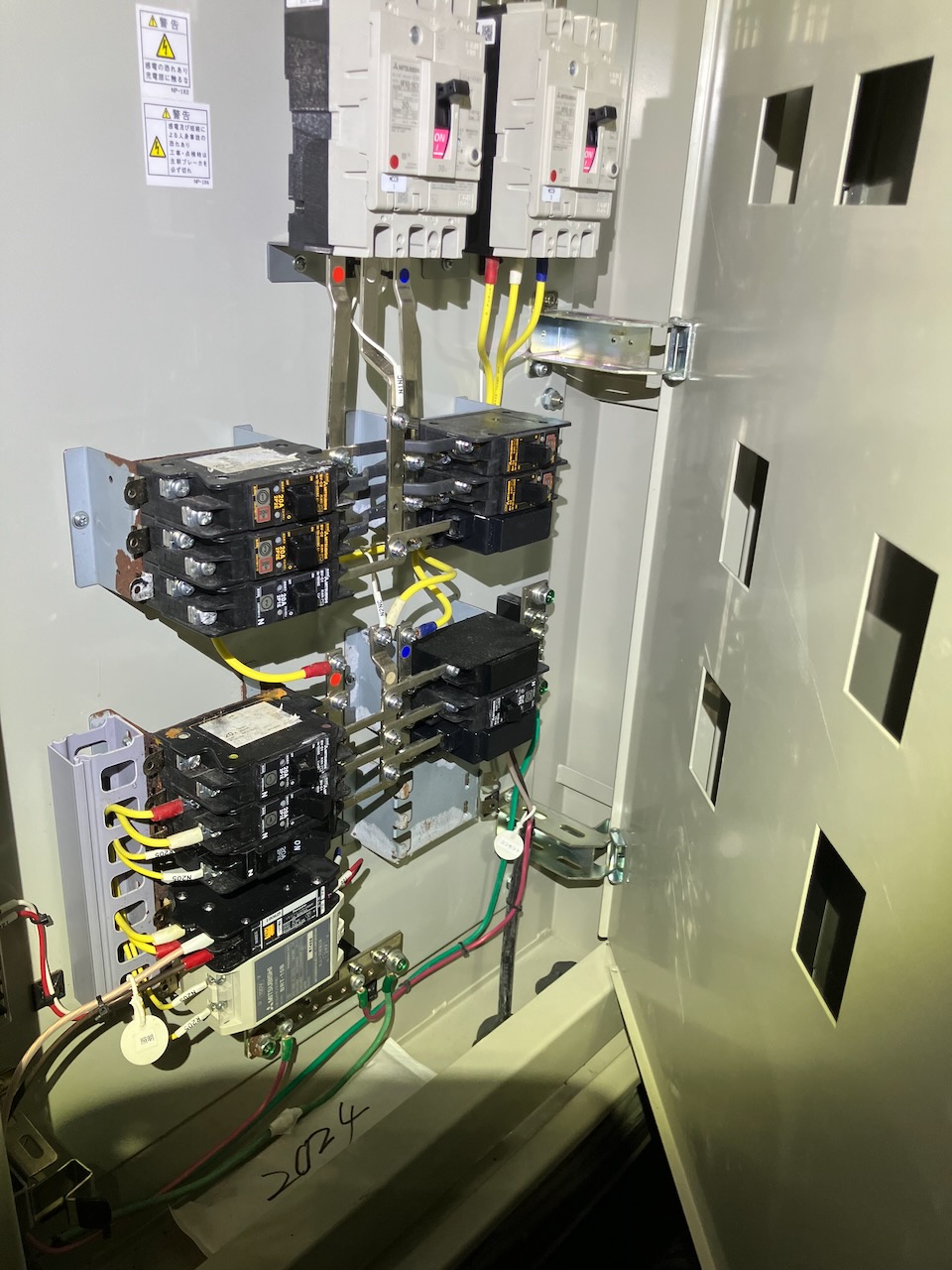
Print this reportInspections for distribution board repair (PLX-127 and PLX-129)
Kimura and Furuyado (Shinkoh Denki) In order to repair the insulation defects caused by rust in the distribution board PLX-129, we confirmed the replacement procedure and the on-site situation. (See attached photos.) Based on the results of the check, a distribution board repair plan will be prepared and the repair will be implemented.
Images attached to this report
VIS (EX)dan.chen - 12:42 Friday 04 July 2025 (34460)
Print this reportETMX IP Offload
With Takahumi USHIBA
Purpose and Overview
Due to tidal motion, an offset gradually accumulates in the feedback signal applied to the IP (Inverted Pendulum).
The purpose of this work was to offload this offset before the IP feedback signal saturates.
Because there is LPY coupling, the offloading causes a drift in the PY alignment of ETMX. Therefore, after offloading, the PY alignment was manually adjusted to maximize the green transmission, and the good oplev setpoints were updated accordingly.
Procedure
Request RESET_ASC_FEEDBACK and DOWN to LSC_LOCK This was necessary to correct the alignment and set all suspensions to LOCK_ACQUISITION.
Monitoring TM Oplev and Green Transmission TM oplev signals and green transmission were monitored during the procedure.
ETMX-IP-ISC2LVDT Filter Bank Opened the filter bank of ETMX-IP-ISC2LVDT. The objective was to bring the output signal to zero. Set the ramp time to 100 seconds. Set the gain to 0. Waited for 100 seconds. Observed that the green transmission decreased (flash level dropped to around 0.4), which was too low for locking. Pressed Clear History. Restored the ramp time to 3 seconds. Restored the gain to 1.
Recovery of Green Transmission by Adjusting TM Oplev Setpoints Manually adjusted TM oplev setpoints referencing the green transmission value. After adjustment, the green transmission recovered to approximately 0.9.
Updating Good Oplev Setpoints Updated oplev setpoints to reflect the adjustments made during this work today: Pitch: 37.2 → 39.1 Yaw: –9.26 → –1.76
Lock Trial Performed a lock acquisition trial. Successfully achieved lock.
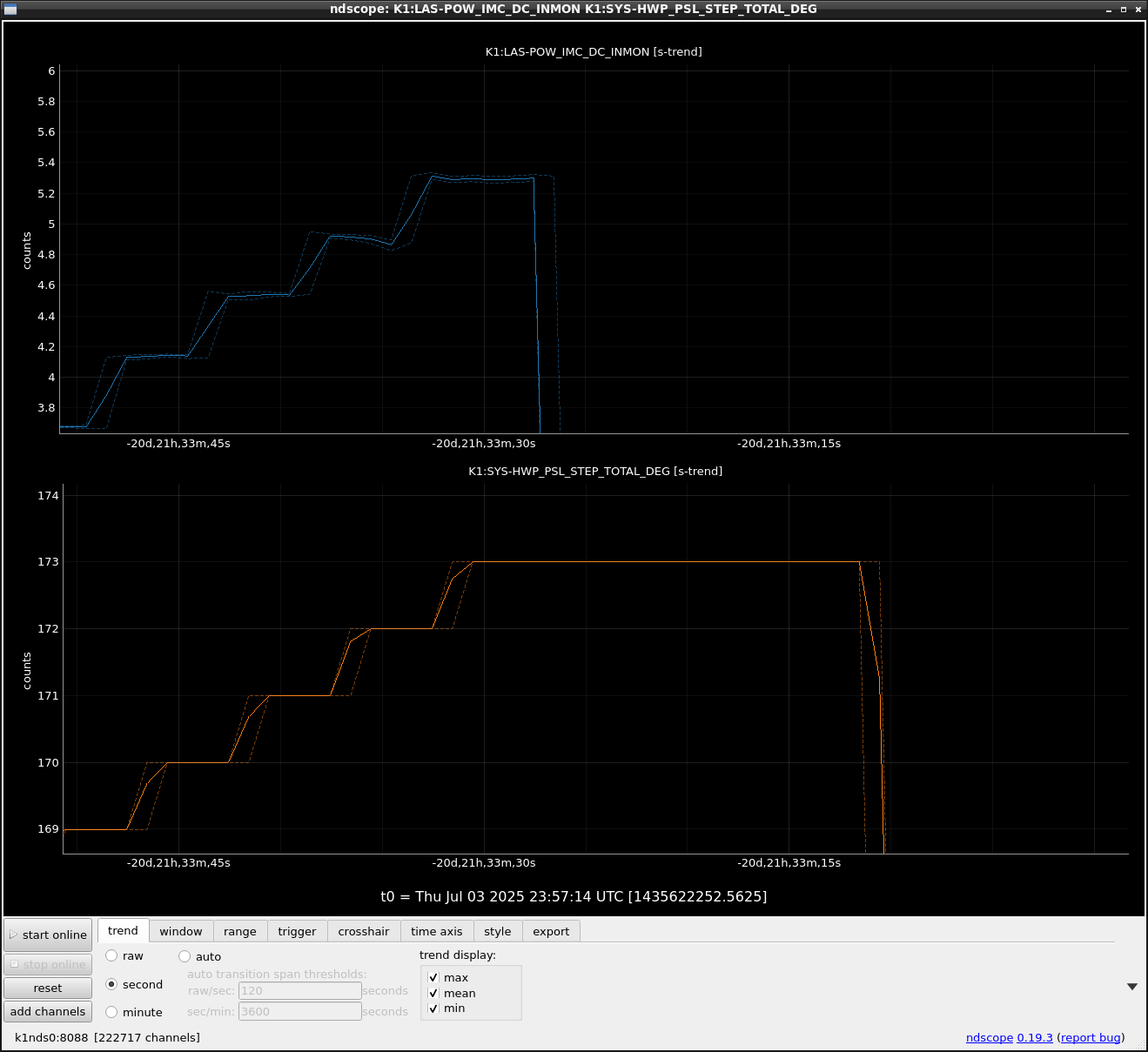
MIF (General)takaaki.yokozawa - 11:05 Friday 04 July 2025 (34459)
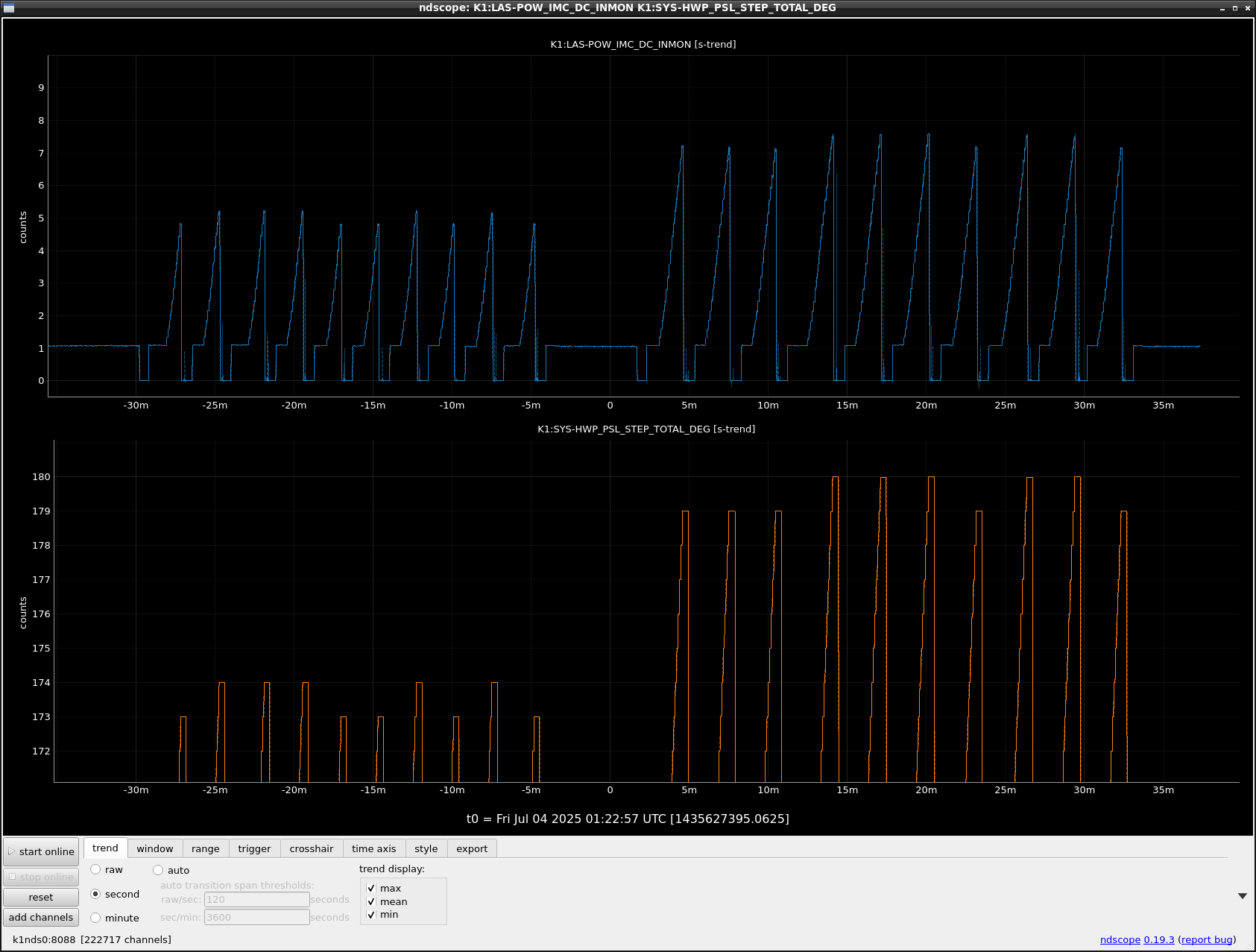
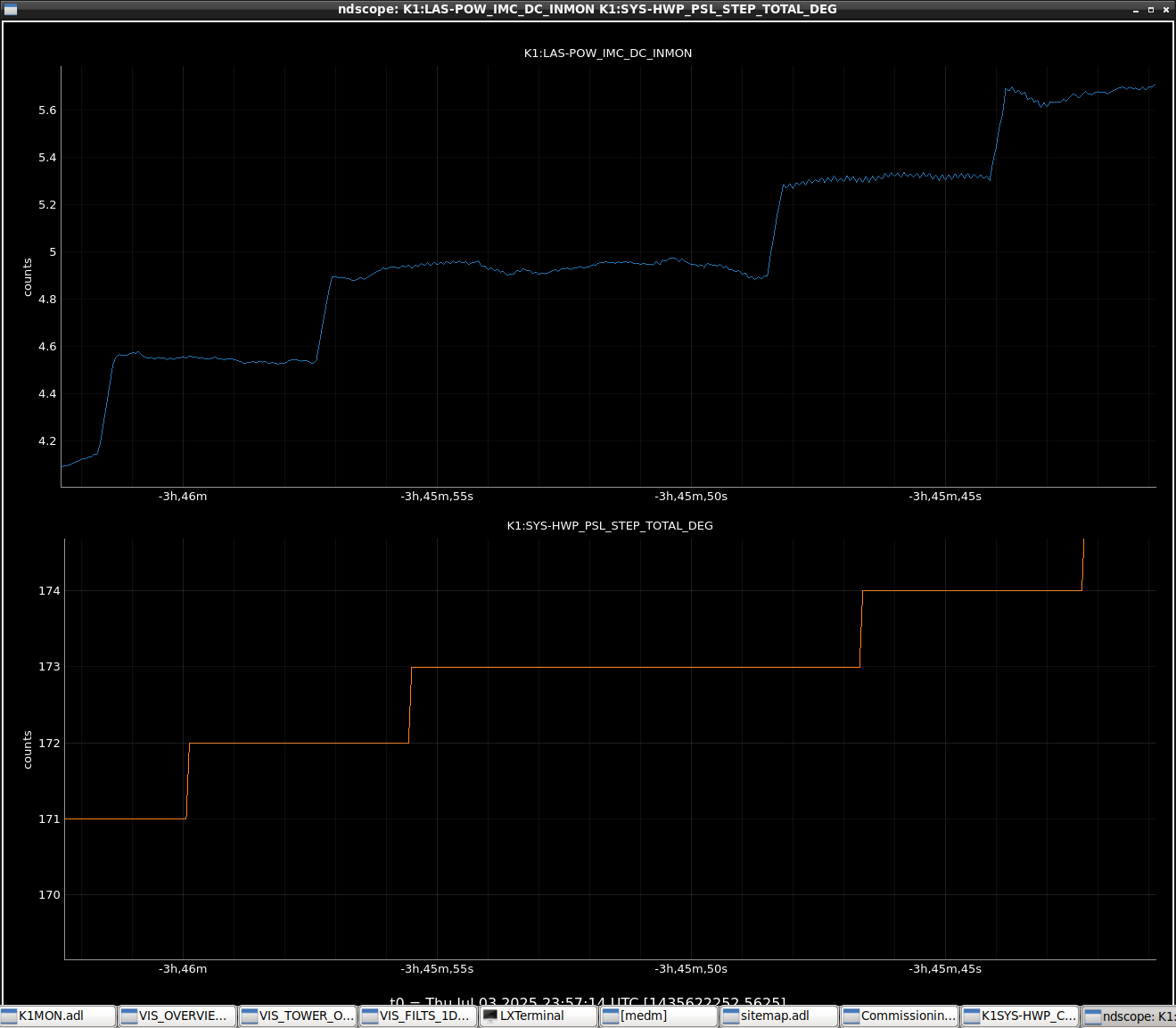
Print this reportComment to Finesse measurement Yarm 20250704 (34457)In current Finesse measurement, there are one thing that even the target rotation of the PSL_HWP = 173 (or 179), the actual value of PSL_HWP became 174 (or 180), sometimes happened.
The Finesse value may not be affected by the beam power, but it would be better to be fixed in future.
Images attached to this comment
MIF (General)takaaki.yokozawa - 10:58 Friday 04 July 2025 (34458)
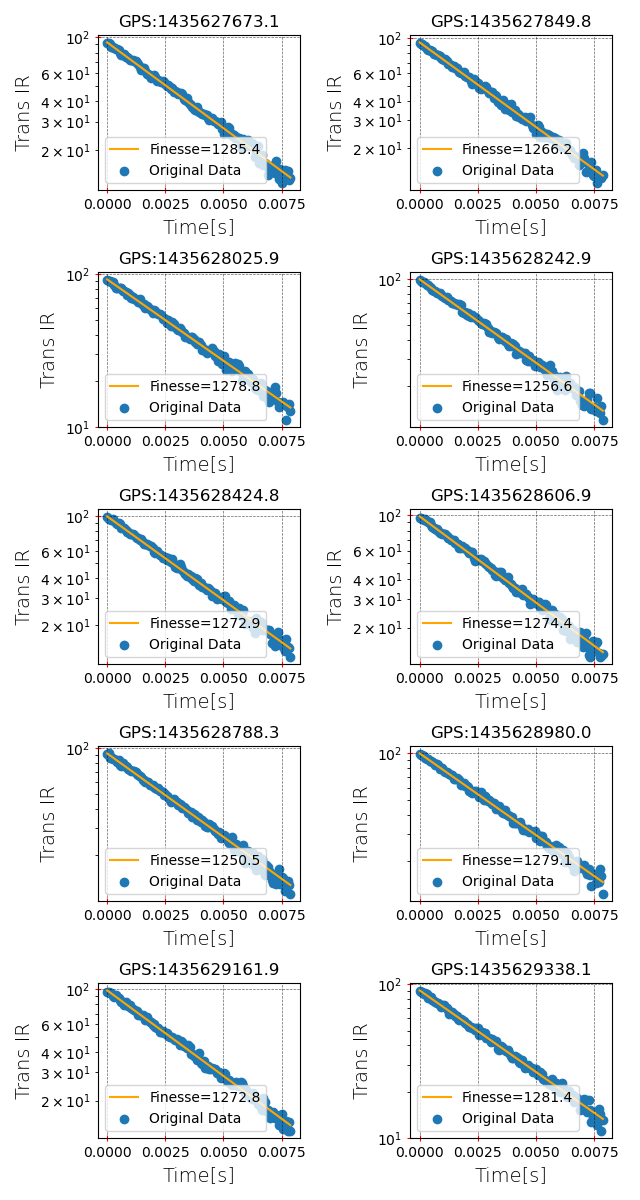
Print this reportComment to Finesse measurement Yarm 20250704 (34457)I performed the same measurement with higher IMC output power. The finesse value slightly increased, but within the error.
DATE : 2025/07/04 01:24 UTC ARM : Y TEMP ITM : 39.1 TEMP ETM : 58.9 NUM : 10 IFO REFL HWP : 152.0 PSL HWP : 179.0 IMC POWER : 7.3 VALUE : 1271.8 ERROR : 10.5
Measured data is stored to /users/Commissioning/data/Finesse/Yarm/20250704-012438
Images attached to this comment
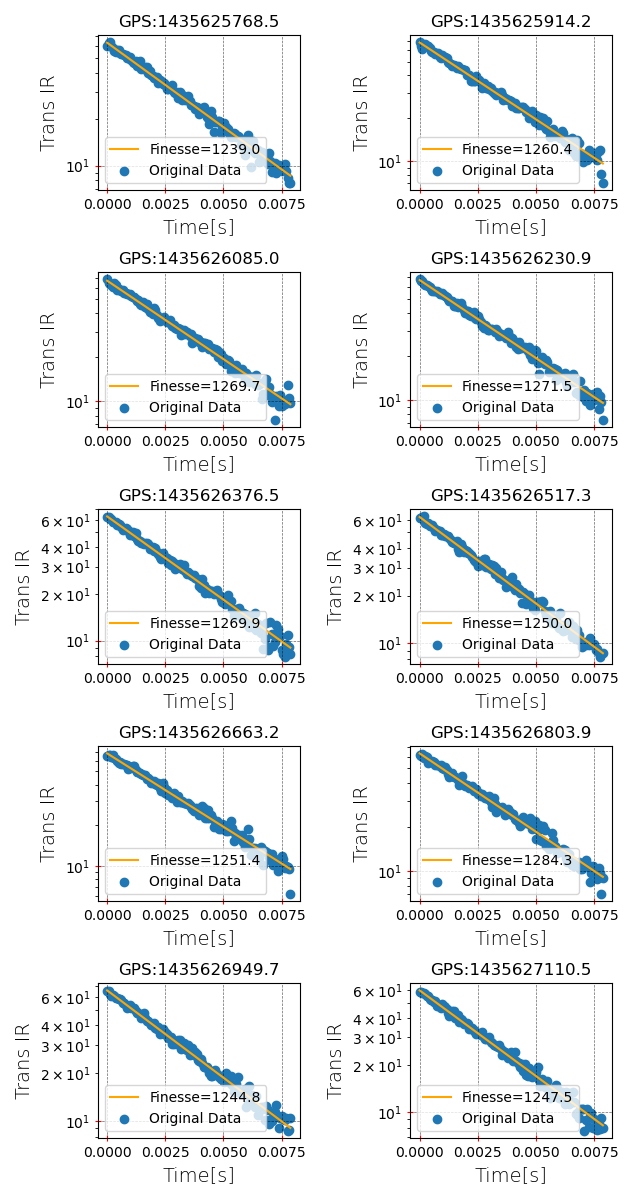
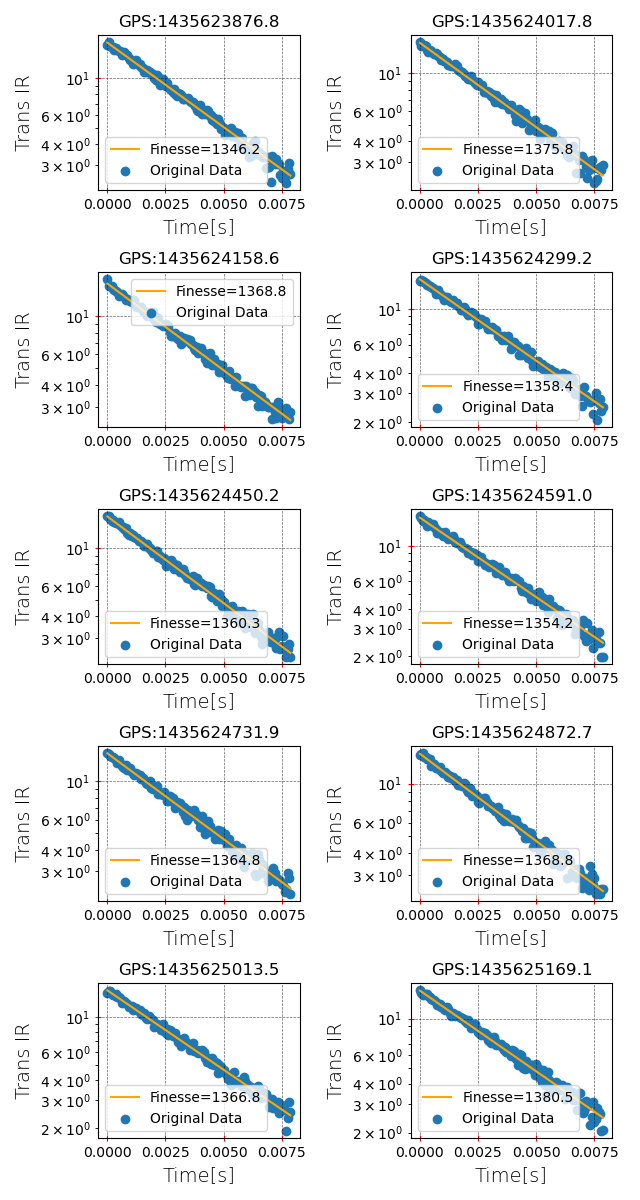
MIF (General)shoichi.oshino - 10:20 Friday 04 July 2025 (34457)
Print this reportFinesse measurement Yarm 20250704DATE : 2025/07/04 00:53 UTC ARM : Y TEMP ITM : 39.5 TEMP ETM : 58.9 NUM : 10 IFO REFL HWP : 152.0 PSL HWP : 173.0 IMC POWER : 5.0 VALUE : 1258.9 ERROR : 13.8
Measured data is stored to /users/Commissioning/data/Finesse/Yarm/20250704-005311
Images attached to this report
Comments to this report:
takaaki.yokozawa - 10:58 Friday 04 July 2025 (34458)
Print this reportI performed the same measurement with higher IMC output power. The finesse value slightly increased, but within the error.
DATE : 2025/07/04 01:24 UTC ARM : Y TEMP ITM : 39.1 TEMP ETM : 58.9 NUM : 10 IFO REFL HWP : 152.0 PSL HWP : 179.0 IMC POWER : 7.3 VALUE : 1271.8 ERROR : 10.5
Measured data is stored to /users/Commissioning/data/Finesse/Yarm/20250704-012438
Images attached to this comment
takaaki.yokozawa - 11:05 Friday 04 July 2025 (34459)
Print this reportIn current Finesse measurement, there are one thing that even the target rotation of the PSL_HWP = 173 (or 179), the actual value of PSL_HWP became 174 (or 180), sometimes happened.
The Finesse value may not be affected by the beam power, but it would be better to be fixed in future.
For these mirrors, I updated the reference positions. I also re-draw the yellow line shown at the k1mon4. For the other mirrors, we don't need to update the reference positions.
MIF (General)shoichi.oshino - 9:59 Friday 04 July 2025 (34456)
Print this reportFinesse measurement Xarm 20250704DATE : 2025/07/04 00:21 UTC ARM : X TEMP ITM : 93.2 TEMP ETM : 38.4 NUM : 10 IFO REFL HWP : 152.0 PSL HWP : 173.0 IMC POWER : 4.9 VALUE : 1364.5 ERROR : 9.6
Measured data is stored to /users/Commissioning/data/Finesse/Xarm/20250704-002159
Images attached to this report
OBS (SDF)dan.chen - 9:42 Friday 04 July 2025 (34455)
Print this reportComment to Changes of observation.snap during O4c (34169)
CAL (Pcal general)dan.chen - 9:24 Friday 04 July 2025 (34454)
Print this reportPcal Parameter Update Report
A CAL Tcam session was performed to obtain beam position information necessary for Pcal. The parameters have already been updated, and SDF has been accepted.
Operator: Shingo Hido, Dan Chen
Update Time: 2025/07/04 09:03:40
EPICS Key
Before [mm]
After [mm]
Δ (After - Before) [mm]
K1:CAL-PCAL_EX_TCAM_PATH1_X
3.26544 mm
3.31876 mm
+0.05332 mm
K1:CAL-PCAL_EX_TCAM_PATH1_Y
62.90884 mm
62.68873 mm
-0.22011 mm
K1:CAL-PCAL_EX_TCAM_PATH2_X
0.13975 mm
-0.12871 mm
-0.26846 mm
K1:CAL-PCAL_EX_TCAM_PATH2_Y
-63.65513 mm
-63.44419 mm
+0.21094 mm
Update Time: 2025/07/04 09:04:08
EPICS Key
Before [mm]
After [mm]
Δ (After - Before) [mm]
K1:CAL-PCAL_EX_TCAM_MAIN_X
3.47421 mm
3.48993 mm
+0.01572 mm
K1:CAL-PCAL_EX_TCAM_MAIN_Y
12.21899 mm
12.19048 mm
-0.02850 mm
Update Time: 2025/07/04 09:04:49
EPICS Key
Before [mm]
After [mm]
Δ (After - Before) [mm]
K1:CAL-PCAL_EY_TCAM_PATH1_X
0.79868 mm
1.19957 mm
+0.40089 mm
K1:CAL-PCAL_EY_TCAM_PATH1_Y
64.20560 mm
64.22827 mm
+0.02267 mm
K1:CAL-PCAL_EY_TCAM_PATH2_X
-0.69337 mm
-0.41650 mm
+0.27687 mm
K1:CAL-PCAL_EY_TCAM_PATH2_Y
-70.20718 mm
-70.59431 mm
-0.38713 mm
Update Time: 2025/07/04 09:05:15
EPICS Key
Before [mm]
After [mm]
Δ (After - Before) [mm]
K1:CAL-PCAL_EY_TCAM_MAIN_X
6.50798 mm
8.77452 mm
+2.26654 mm
K1:CAL-PCAL_EY_TCAM_MAIN_Y
-3.22455 mm
-3.34206 mm
-0.11751 mm
MIF (General)takaaki.yokozawa - 9:06 Friday 04 July 2025 (34452)
Print this reportComment to Finesse measurement Xarm 20250613 (34184)The IMC output power vs PSL HWP rotation was different from previous Finesse measurement. Should we keep sam IMC output power or PSL_HWP value? Fig.1. 13th June Fig.2. Today 4th July
Images attached to this comment
MIF (General)dan.chen - 5:18 Friday 04 July 2025 (34451)
Print this reportComment to Violin mode Q estimation (34436)
After checking the updated PDF, it seems that all three peaks in question (1st No.2, No.6, and No.9) have issues in the fitting results. I plan to adjust the settings to use a longer FFT length and reanalyze them.
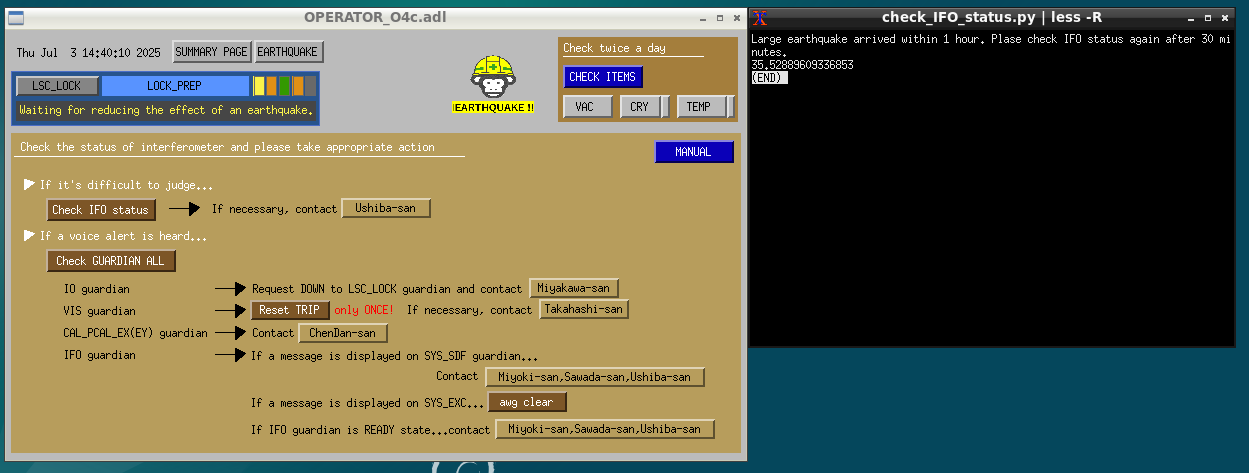
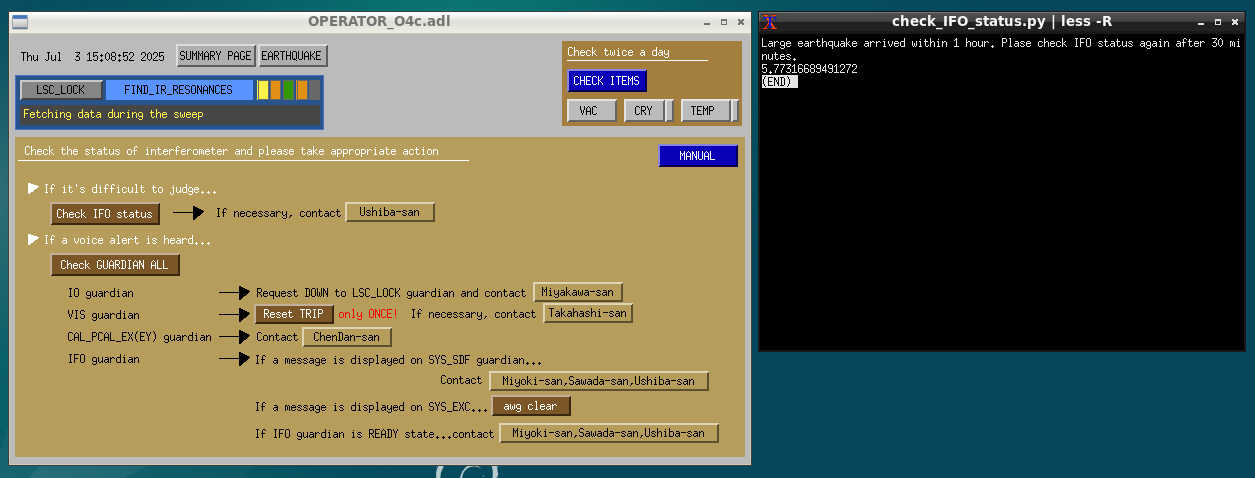
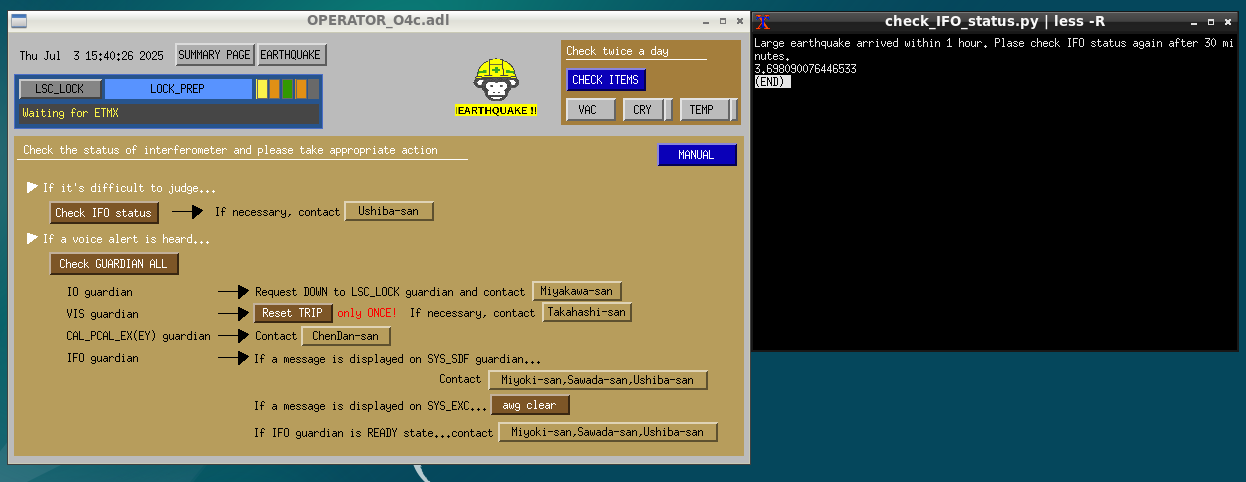
OBS (Summary)dan.chen - 16:36 Thursday 03 July 2025 (34450)
Print this reportComment to Operation shift summary (34449)
output from check_IFO_status.py
Images attached to this comment
OBS (Summary)dan.chen - 16:34 Thursday 03 July 2025 (34449)
Print this reportOperation shift summary
Operators
Takaaki Yokozawa, Hiroshi Takaba, Dan Chen
Shift Time
9:00–17:00 JST
Check Items
VAC: No issues were found.
CRY cooler: No issues were found.
Compressor: No issues were found.
OBS INTENT: The OBS INTENT was ON throughout the shift.
Note
There was a period when the interferometer did not lock for an extended time. Just before the unlocked duration reached one hour, an earthquake occurred.
After that, earthquakes continued to occur sequentially.
dan.chen - 16:36 Thursday 03 July 2025 (34450)
Print this report
output from check_IFO_status.py
Images attached to this comment
MIF (General)takafumi.ushiba - 15:28 Thursday 03 July 2025 (34448)
Print this reportFailure of auto recovery of the IFO
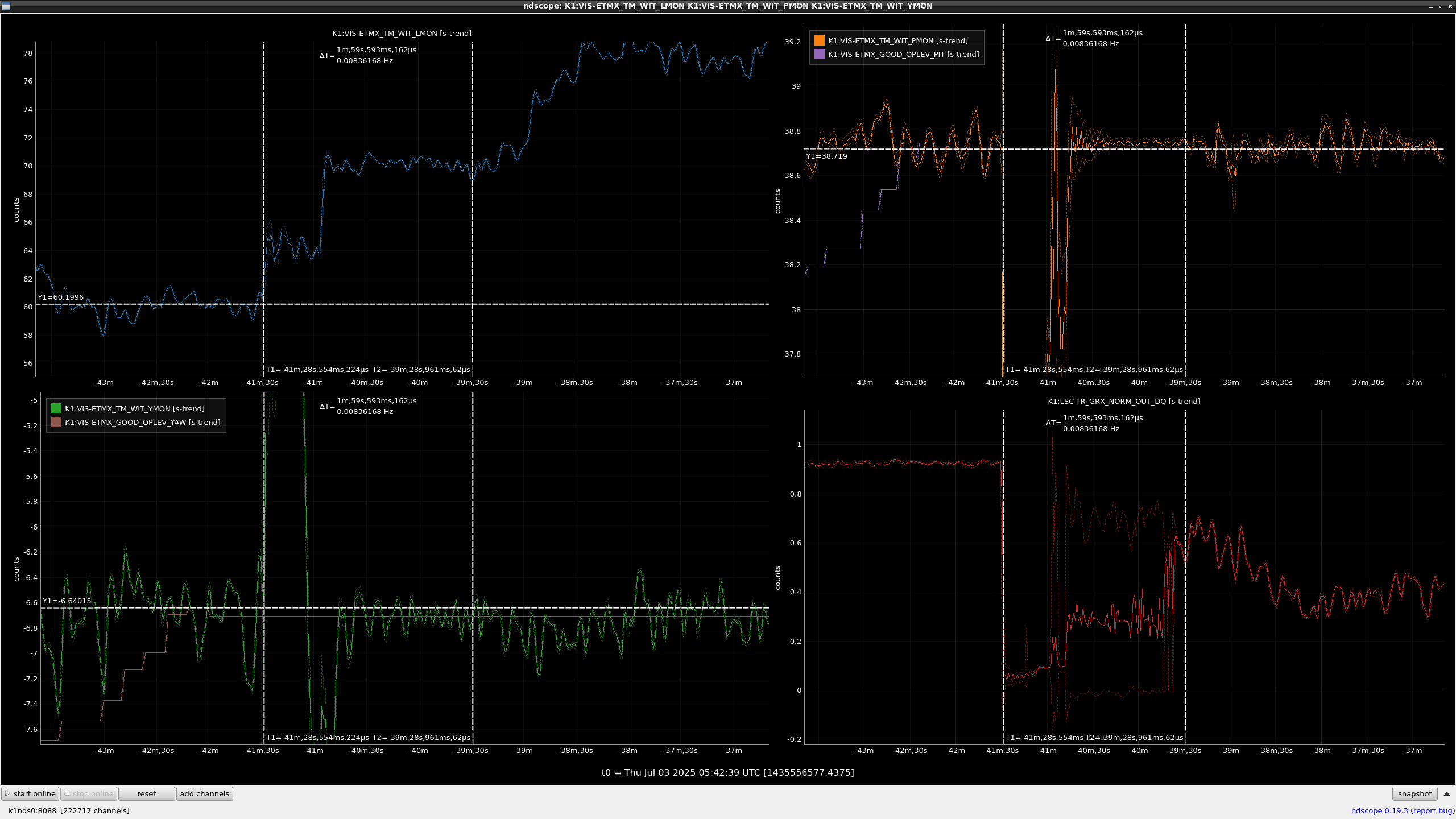
Today, IFO could not be recovered to even RF-locked state automatically by the guardian for a long time (more than 1 hour). Since this is the first time that IFO could not be recovered automatically during O4c observing run, I investigated the reason.
Figure 1 shows the ETMX OpLev values before and after the final lock of the interferometer. Though pitch and yaw values were recorded well, LS oplev values were changed a lot. This is probably due to the DARM control feedback signals, so it is hard to control.
To avoid the same instability, what we can do is 1. Record LS Oplev values of ETMX and move suspensions so that LS OpLev values becomes close to the one before lockloss. 2. Move ETMX angle during the lock acquisition so that arm alignment becomes good, for example by ADS using GRX. 3. Decouple L2P and L2Y more to reduce the misalignment when LS OpLev values are changed.
Since there are several advantages and disadvantages in the above 3 countermeasures, we need to consider what kind of treatment should be done.
Images attached to this report
MIF (General)dan.chen - 15:03 Thursday 03 July 2025 (34447)
Print this reportComment to Violin mode Q estimation (34436)
According to klog32643, the peaks got the very high Q values seem to be violin mode:






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}