[Komori, Shoda, Izumi, Enomoto, Michimura]
We have looked into BS IM and TM actuation transfer function measurements.
The three models by Komori, Shoda and Michimura agreed within ~10 % (in the unit of m/N).
The measured value for TM gives 40% less efficiency than Michimura model. The measured value for IM agrees within 3 % with Michimura moel.
Difference between models
1. Komori model (lives in /users/komori/20180424/BSTF.m)
Fimple double pendulum model, uses calculated coil-magnet parameters in this wiki (see klog #4811)
2. Michimura model (lives in /kagra/Dropbox/Personal/Phase1Paper/data/ETMactuationTF/michimura_TF.m, originally from /kagra/kagranoisebudget/Suspensions/run_SAS_NB.m)
Fitted TF of SUMCON result from 2015, uses calculated coil-magnet parameters in this wiki
3. Shoda model (lives in /kagra/Dropbox/Subsystem/VIS/Scripts/SuspensionControlModel)
SUMCON result, uses measured coil-magnet efficiency by local sensors (TM coils are calibrated using oplev and IM coil is calibrated using OSEM)
Updates
1. The coil driver gain 1.33 was assumed in the Komori model, but high power coil drivers currently used in the BS do not have this gain (only low power coil drivers have this gain). So, 1.33 was replaced with 1.
2. Shoda model was updated as in klog #4850. EUL2OSEM factor was added (for both pitch actuation (1.98) and length actuation (0.25)). This reduced the TM actuation efficiency by 0.25/1.98.
3. Izumi measurement was done in the unit of ETM-equivalent MICH displacement per counts. The measurement data should be divided by sqrt(2) to convert it in the unit of BS displacement per counts.
Result
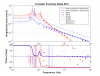
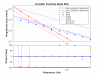
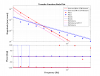
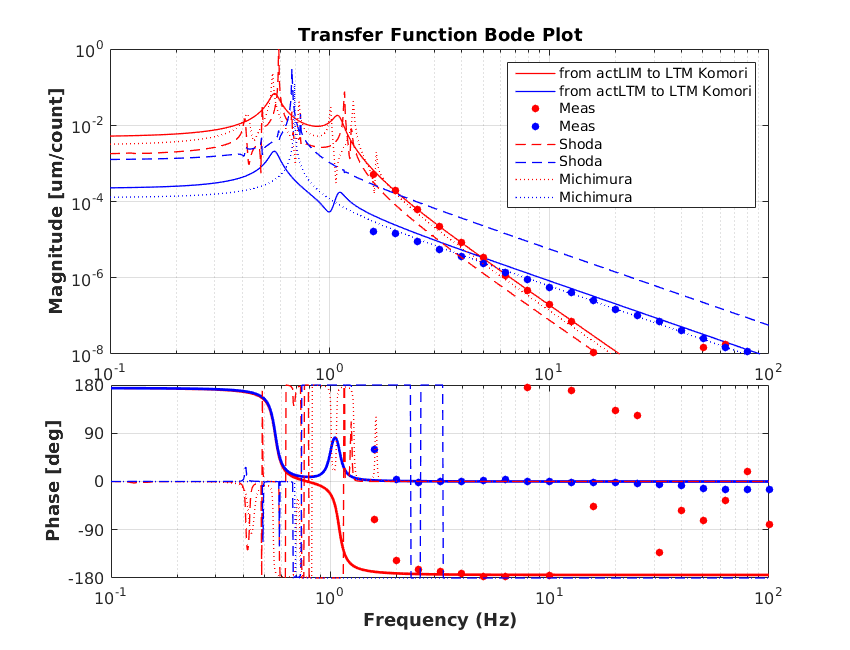
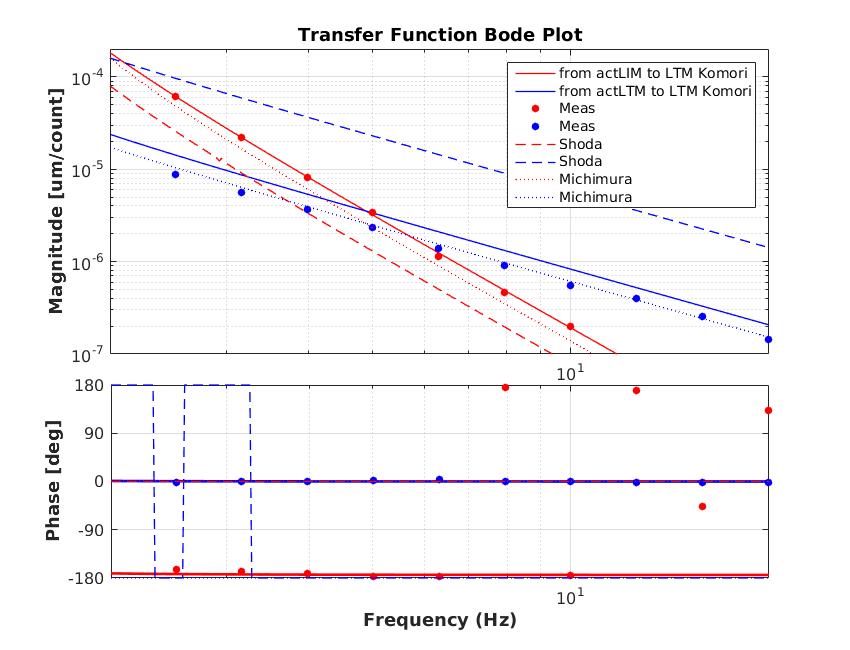
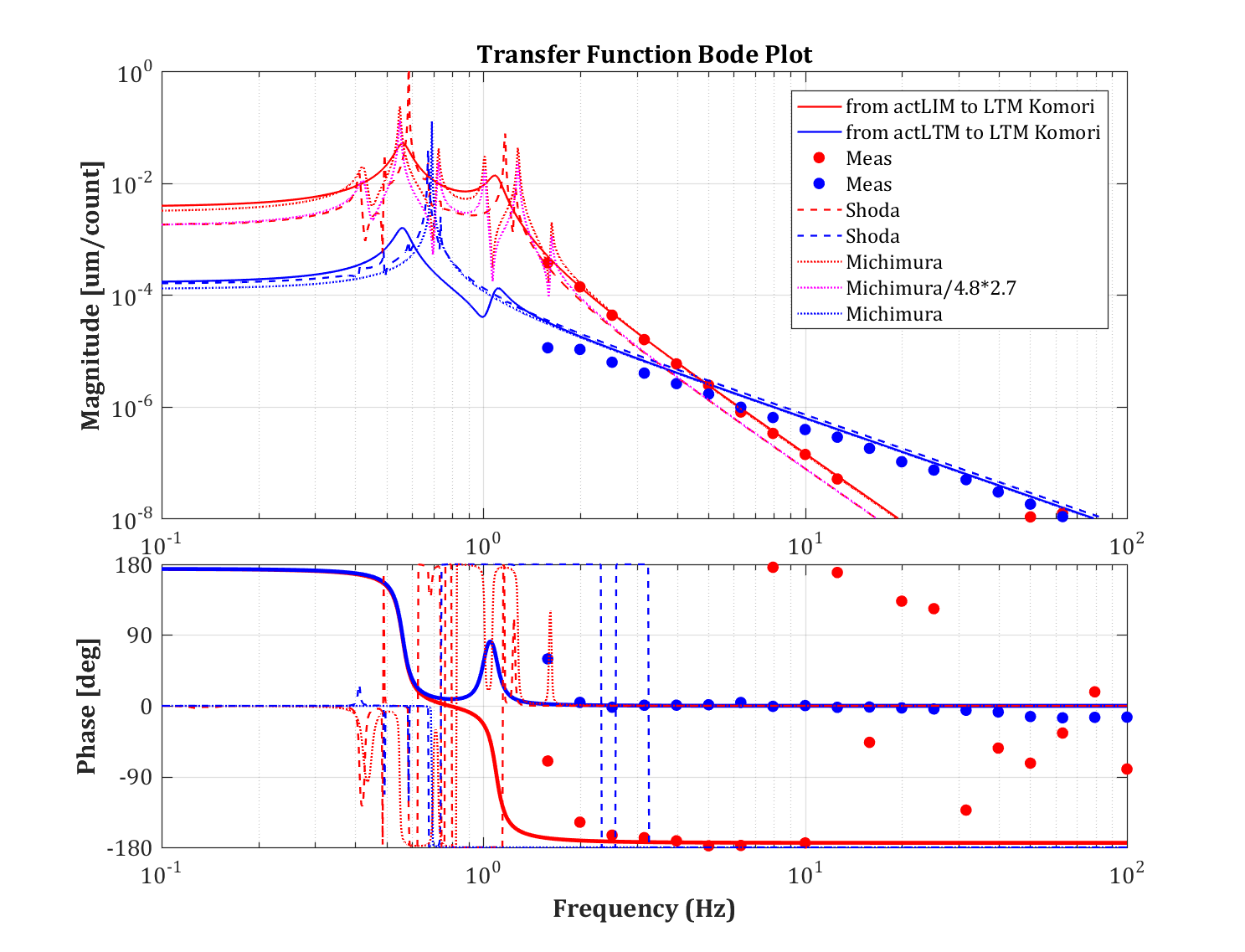
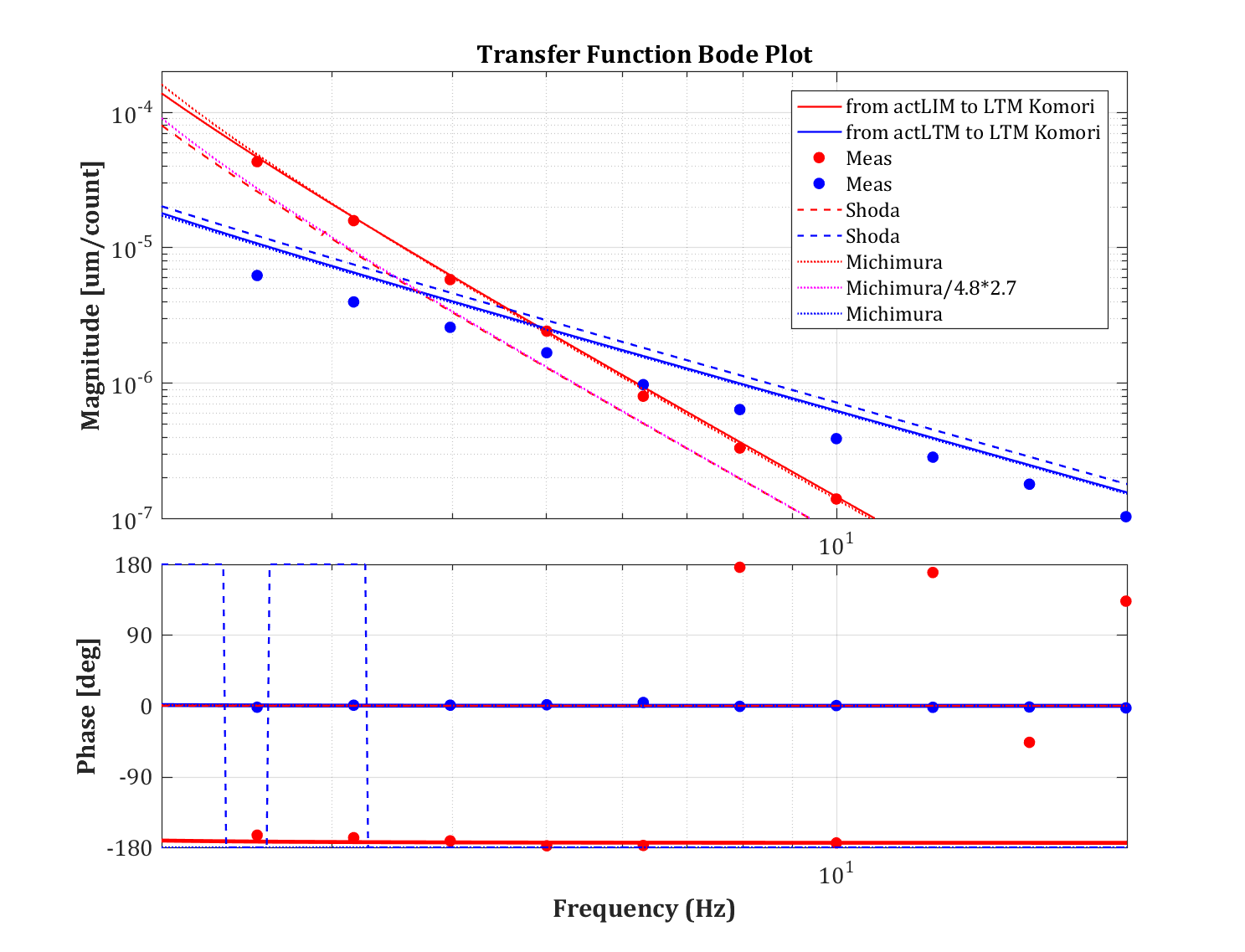
Attached are updated plots in the unit of BS displacement (not MICH displacement) per counts (before EUL2OSEM matrix).
The result of each model and the measurement at 10 Hz is as follows:
Komori Michimura Shoda Measured
BS TM 6.1e-7 6.2e-7 7.1e-7 3.9e-7
BS IM 1.4e-7 1.4e-7 7.7e-8 1.4e-7 [all in the unit of um/counts]
Komori model and Michimura model agreed within 2 % at free-mass region, as expected.
Shoda model and Michimura model agreed within ~10 % for TM. I think it is reasonable considering the different approach in the coil-magnet parameter derivation. For IM, disagreement can be explained by the difference in the IM coil-magnet efficiency used.
Shoda model uses measured value by local sensors as
BS TM: 0.0527 uN/cnt
BS IM: 2.7 uN/cnt
whereas Michimura model uses theoretical calculation done by Mark (JGW-T1503239) as
BS TM 0.0138 N/A / 80 Ohm * 20 V / 2^16 cnt = 0.0526 uN/cnt
BS IM 1.25 N/A / 80 Ohm * 20 V / 2^16 cnt = 4.76 uN/cnt
All the files are uploaded to /kagra/Dropbox/Personal/Phase1Paper/data/BSactuationTF/ .
Next step
- Check IM coil-magnet efficiency
 BEAUTIFUL!!
BEAUTIFUL!!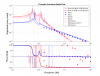
{kind=link}
{kind=link}
{kind=link}
{kind=link}