Given the fact that the diagonalization procedure I tried for the LVDTs, introduced some large coupling (klog 22451), I reverted to the purely geometrical matrices (per the 3D-CAD). In practice, this simply implies setting matrices LVDTALIGN and ACTALIGN to the unit matrix since the geometrical information is in LVDT2EUL and EUL2COIL.
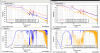
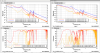
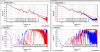
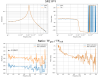
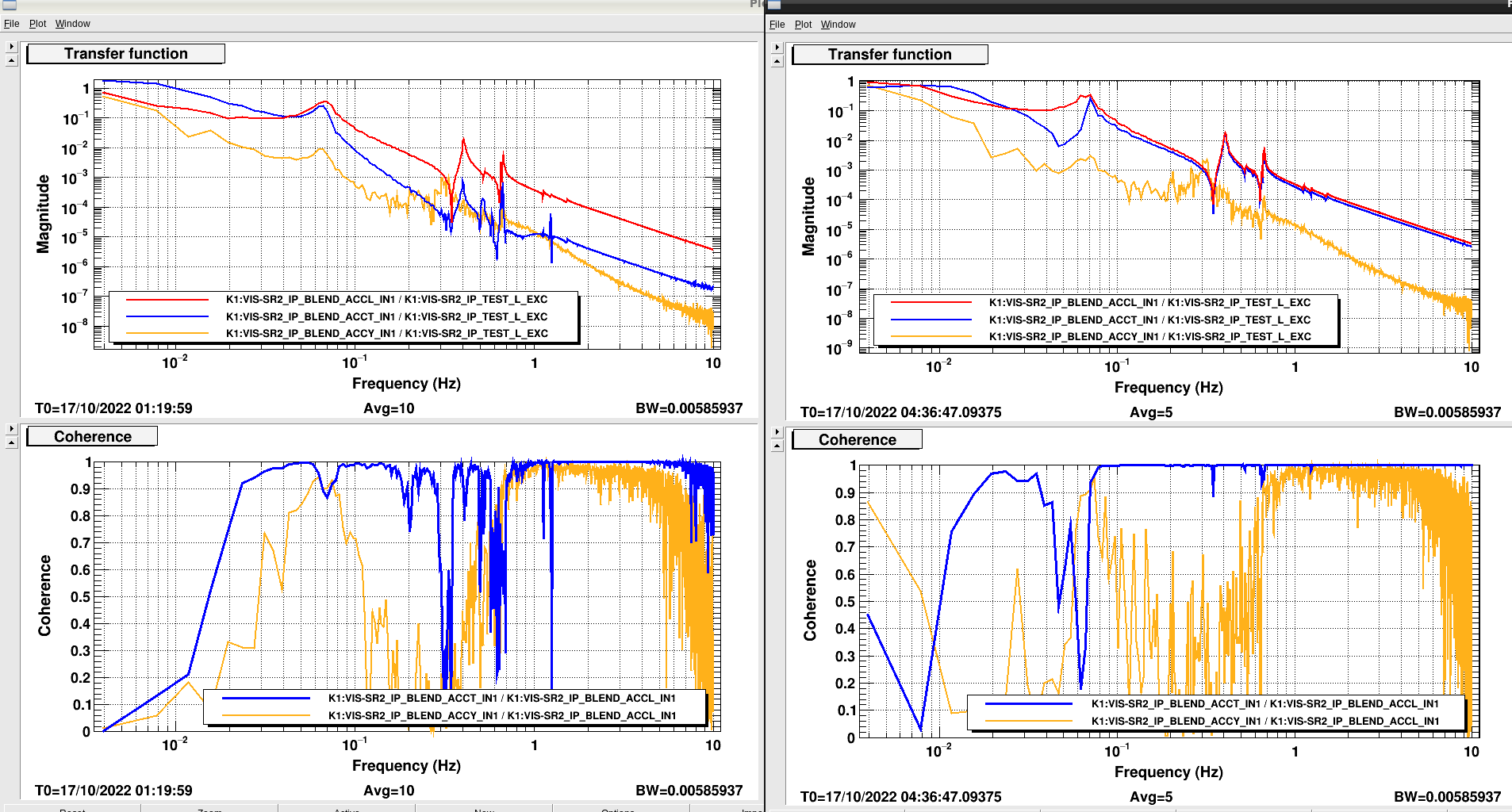
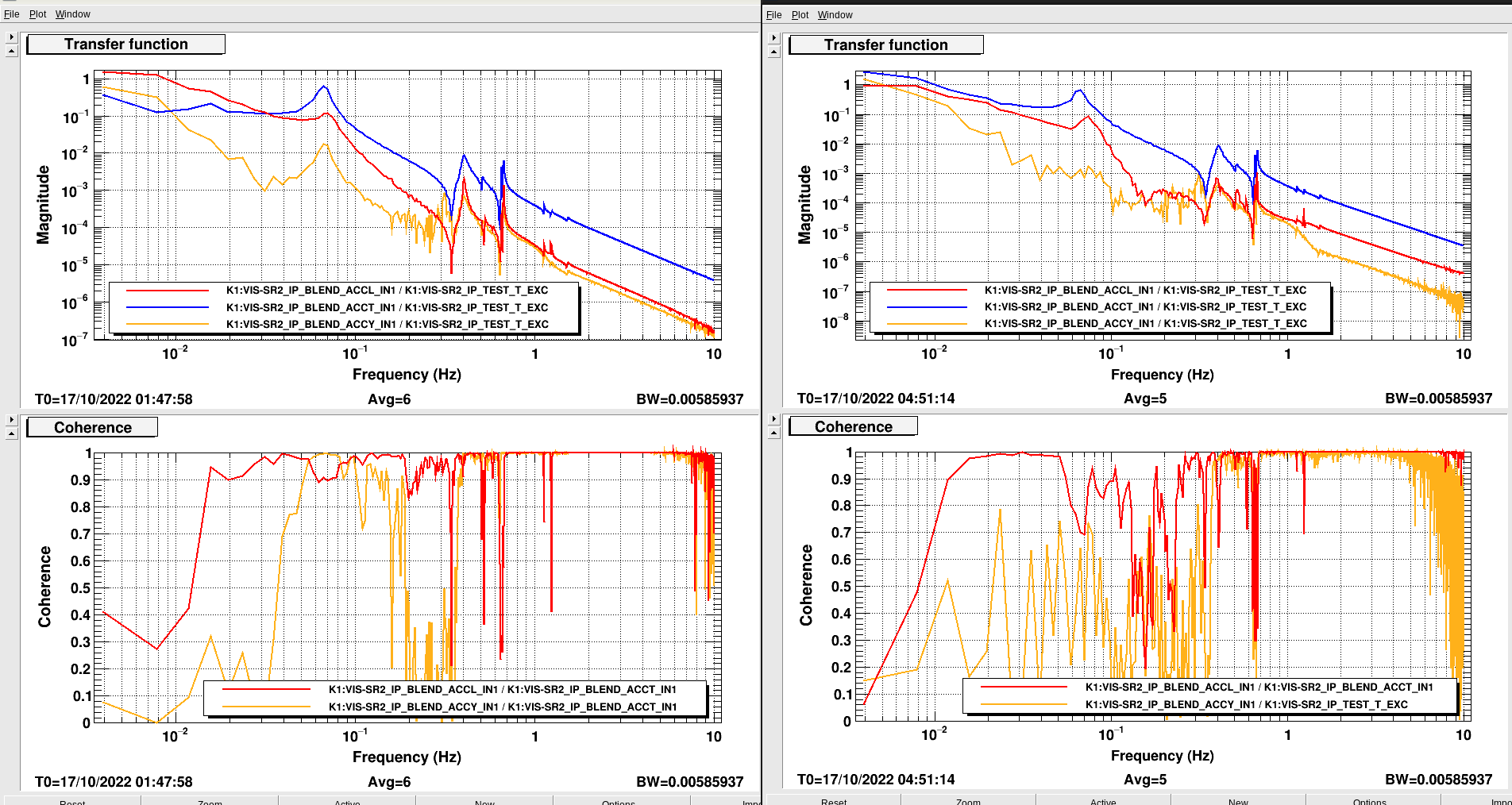
Then I tried to diagonalize the geophones in L, T and Y. Unfortunately, the coupling from L to T increased above the resonant frequency. See in Fig. 1 the before (left) and after (right) transfer functions. Becuase of this, I decided to keep the purely geometrical matrices instead. Fig. 2 and 3 show the coupling from T and Y, before (left) and after (right) diagonalization. There is some improvement in those degrees of freedom. (The files are in /kagra/Dropbox/Subsystems/VIS/TypeBData/SR2/TF/Measurements/20221017/)
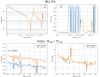
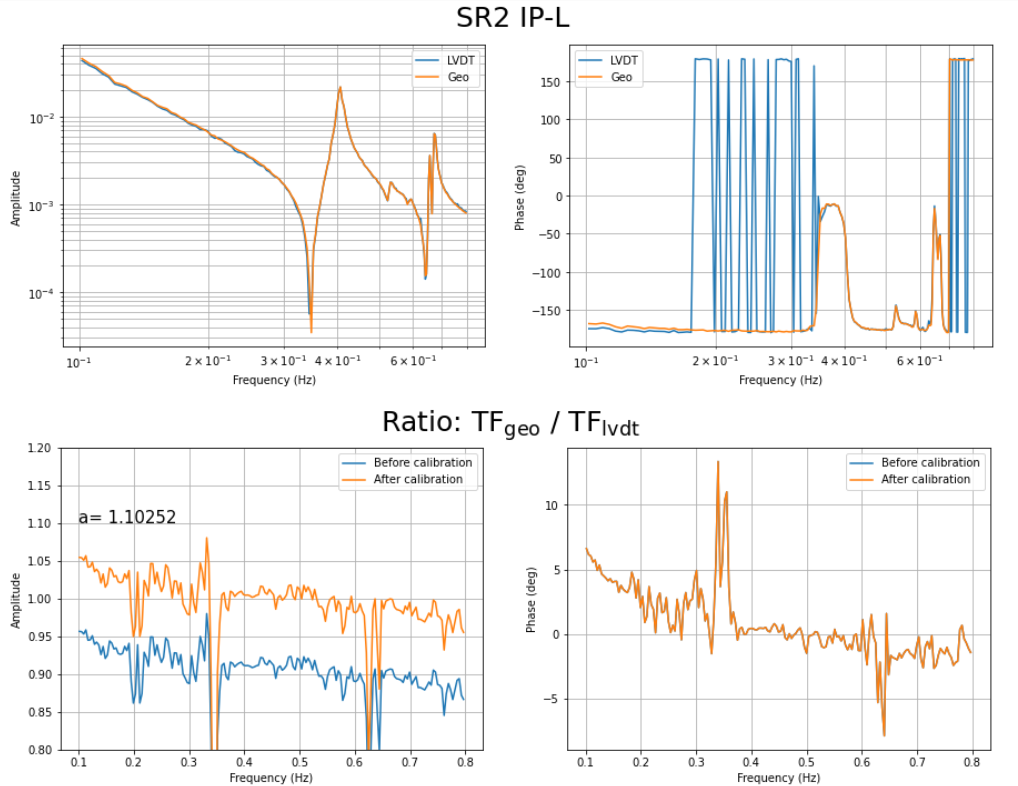
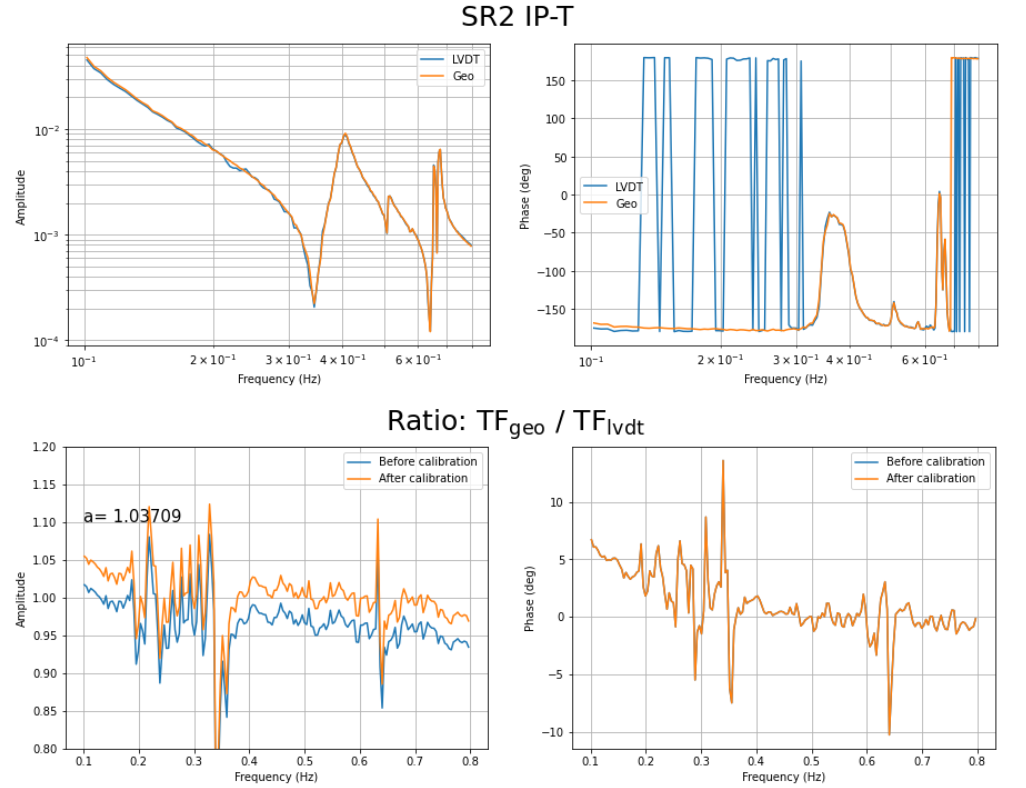
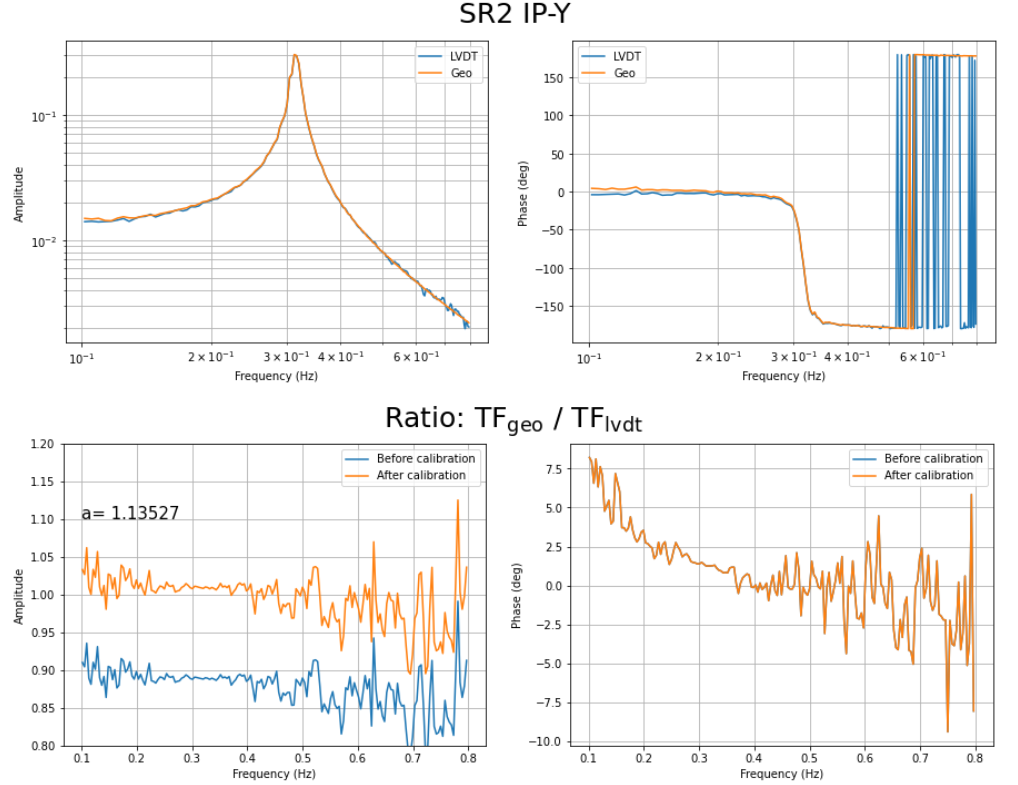
With the purely geophone geometrical matrices, I calculated again the inter-calibration factors between geophones and LVDTs. I did it before (klog 20812), but I had used an old version of the diagonalizaton matrix (klog 22433), whose performance I should check again sometime. The results are shown in Figs. 4,5 and 6. I wrote the calibration factors multiplying by the old ones because I forgot to remove the old ones before the measurement.
The next step is to recalculate the inter-calibration factor between the seismometer and the geophones and LVDTs.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}