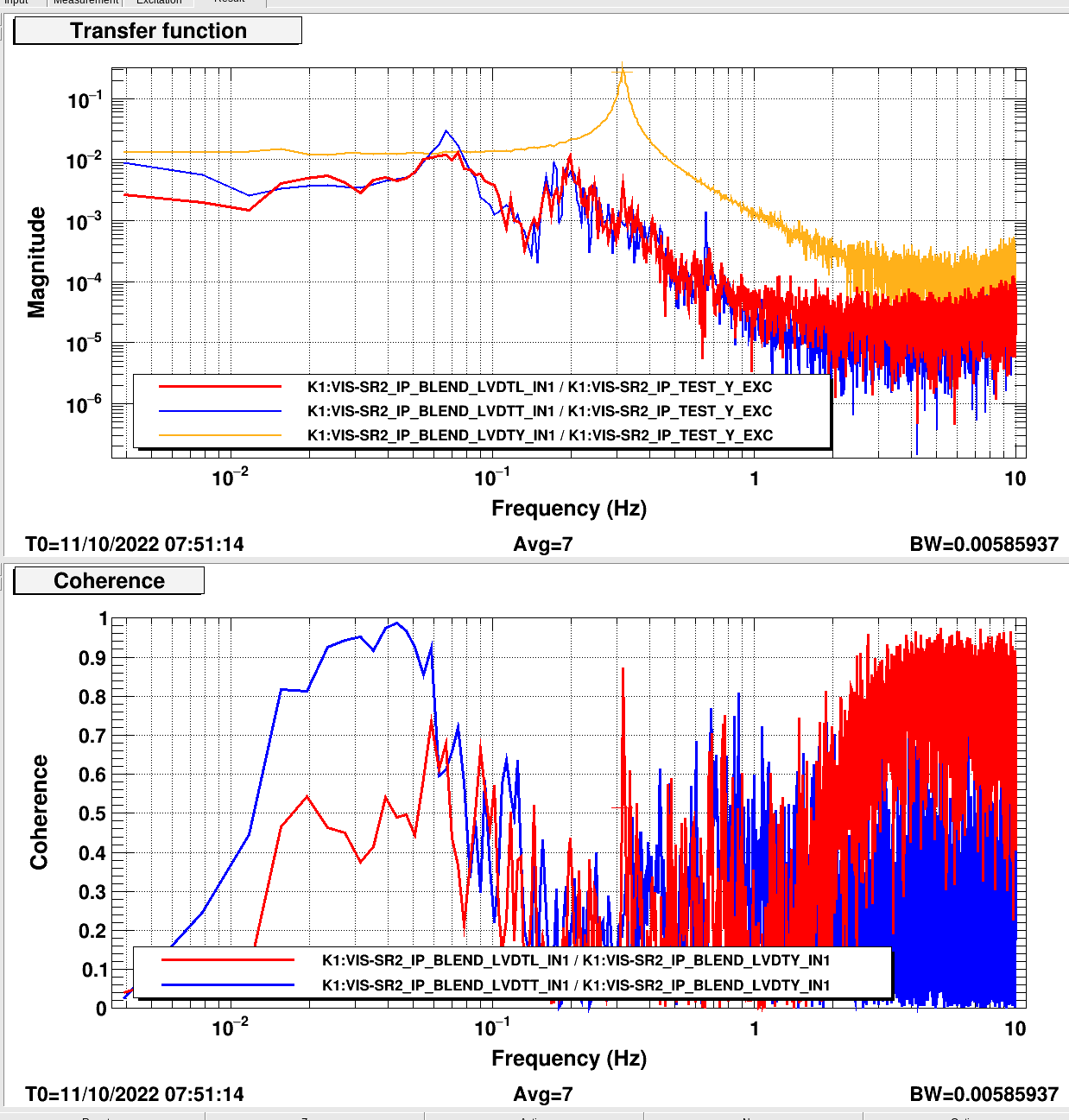
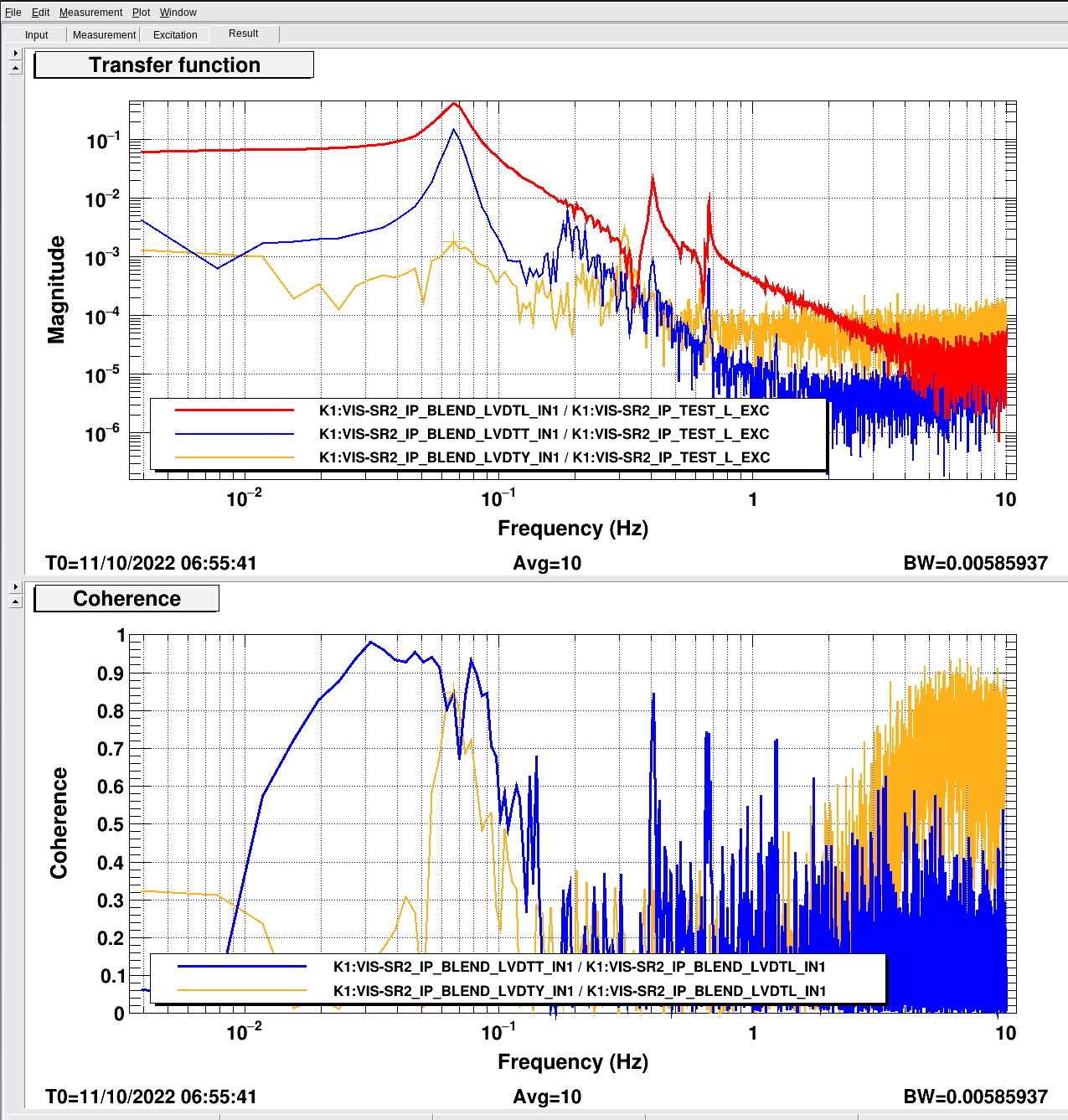
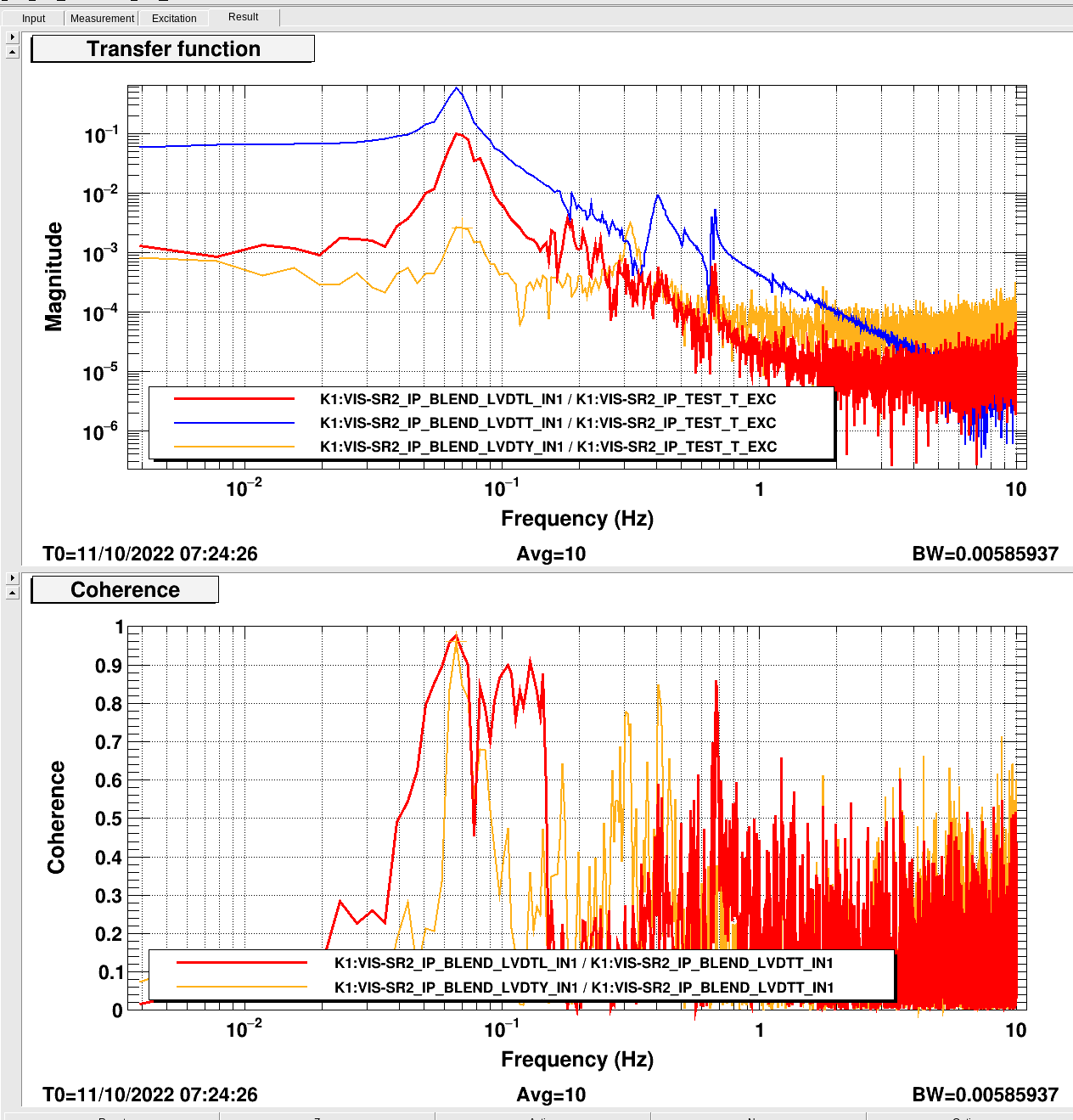
I carried out the sensor and actuator diagonalization in the IP. However, the resonant frequencies in L and T are very close, making it difficult to distinguish sensor coupling from actuator coupling. Both are at 66 mHz using 5 mHz resolution in the TF measurement, values that are consistent with klog 17208.
At a first glance, the results don't seem encouraging, as large coupling between L and T remain (see the final result in the figures). I'll analyze the data more carefully and explain.
The matrices that I calculated are:
LVDTALIGN =
[[ 1. 0. 0. ][ 0. 1. 0. ] [-0.0151811 -0.00525001 1. ]]
ACTALIGN=
[[ 9.77986387e-01 -1.13989532e-01 5.24470303e-02] [ 1.89263099e-01 9.78481134e-01 -5.07918172e-02] [-9.46772968e-04 -8.76784587e-03 1.00048999e+00]]
I haven't commited this values in the SDF.
----------------------------
The files I used live in this directory: /kagra/Dropbox/Subsystems/VIS/TypeBData/SR2/TF/Measurements/20221011/
------------------------------------------------------------
This is a back up of the old ACC2EUL matrix that I removed before begining the work.
####### SR2 IP ACC2EUL
### JGW-E2012144-v11 != JGW-D1707269-v2 (R=0.5915, H1=-75.0, ccw=True)
[[ 0.64395055, -0.47140452, -0.17254603],
[ 0.17254603, 0.47140452, -0.64395055],
[ 0.56353903, 0.56353903, 0.56353903]]
### current EPICS
[[ 0.70717917, -0.4365051 , -0.24289589],
[ 0.18548488, 0.4903748 , -0.6430353 ],
[ 0.63563217, 0.61924465, 0.59764597]]
### diff
[[ 0.06322862, 0.03489942, -0.07034986],
[ 0.01293885, 0.01897028, 0.00091525],
[ 0.07209314, 0.05570562, 0.03410694]]
### diag = current * theory^{-1}
[[ 1.05460442, 0.10899513, 0.01643079],
[-0.00115293, 1.01587877, 0.01941562],
[ 0.02141928, 0.02510413, 1.09576723]]



{kind=link}
{kind=link}
{kind=link}