[work on 2021-06-26]
I attempted to diagonalize the geophones by first aligning the actuators to the LVDT L, T, and Y readout at 0.2 Hz and align the geophones to the actuations at that frequency.
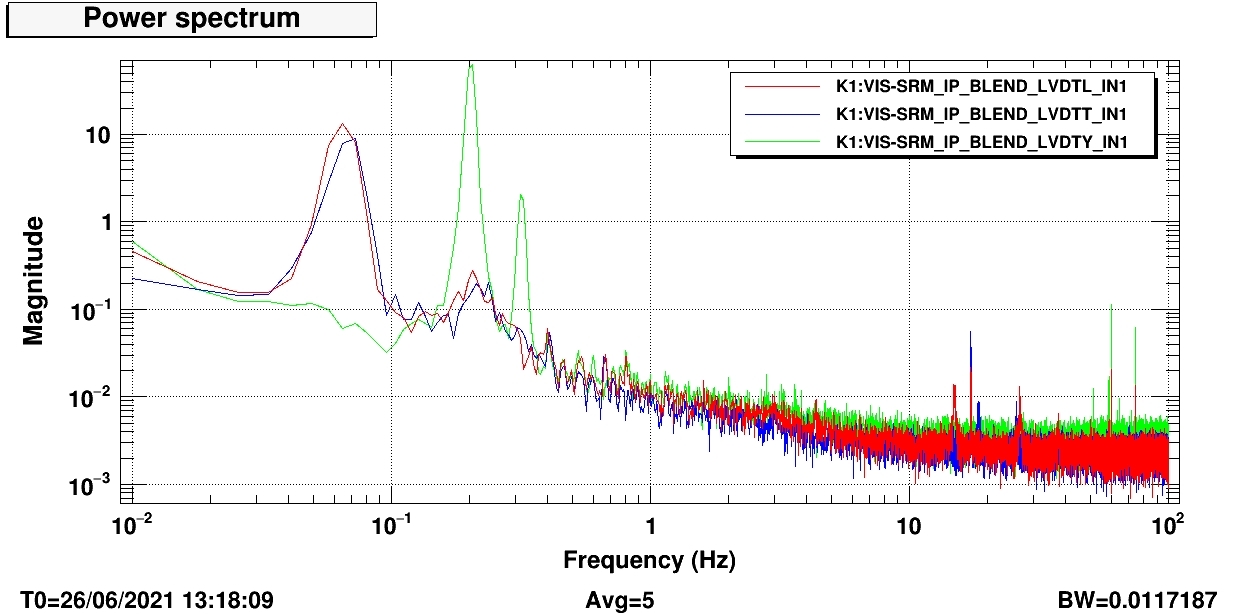
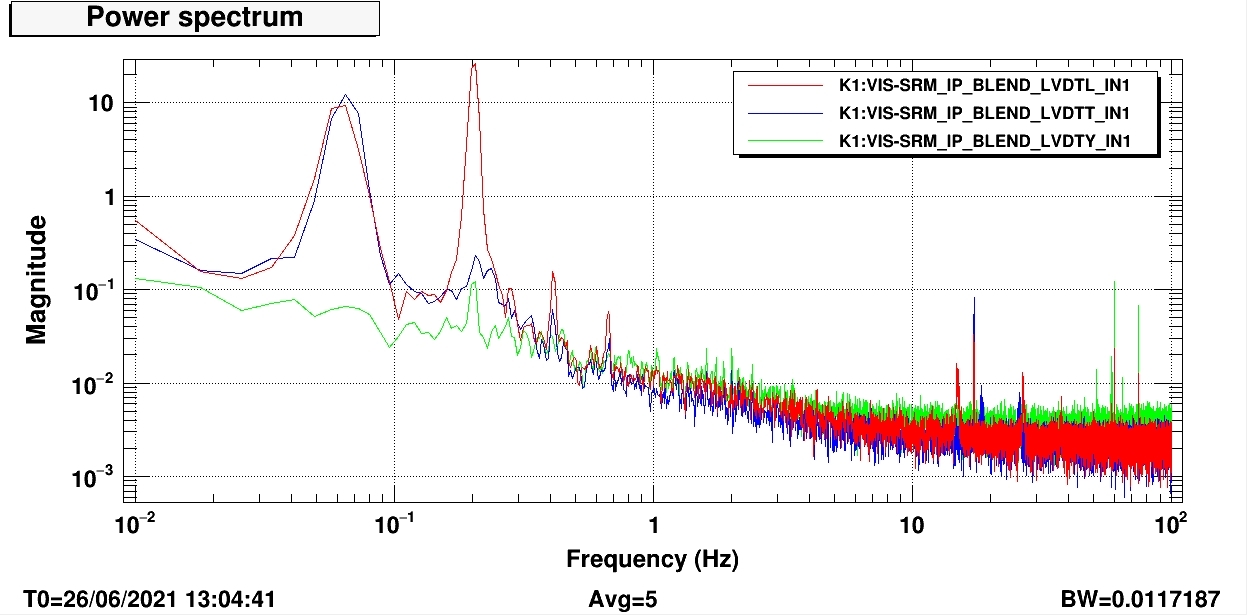
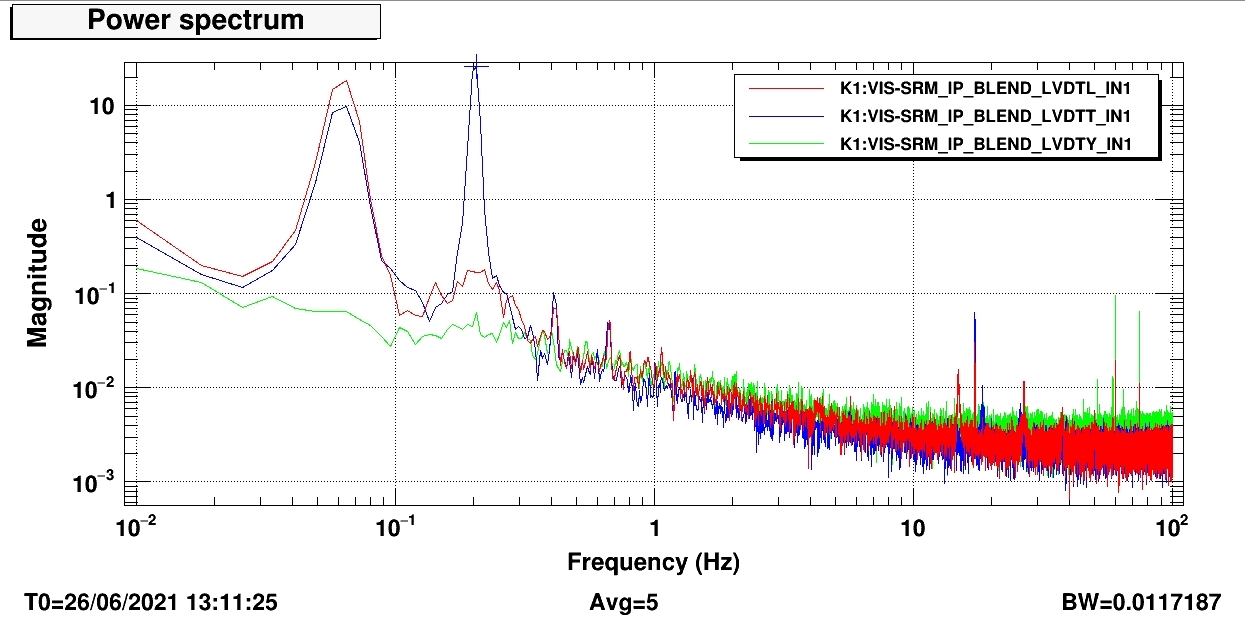
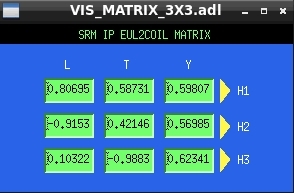
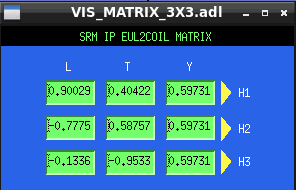
To align the actuations, I inject 0.2 Hz line signals to at the L, T, and Y actuations and calculate that actuation matrix that minimizes the coupling while retaining the same actuation efficiency. The actuation matrix EUL2COIL was modified and the results are shown in Fig. 1, 2, and 3. The current EUL2COIL matrix is shown in Fig. 4. As can be seen from the sensing readouts, the actuation couplings are minimal at that frequency (but probably only at that frequency because actuation couplings are frequency-dependent). It might seem that there's obvious residual coupling between L and T, but that's actually the microseism. I am inclined to keep this matrix. In the worst case we can simply revert it to the geometric one.
After that, I tried to diagonalize the geophones by doing the same actuation injections and measure sensor couplings. However, this was not successful at the first place because the geophones had wrong calibration filters that give very strange phase response everywhere. This resulted in an ad-hoc tweaking of the calibration filters, especially for that of the H2 geophone (If we remember this, this must be revisited). The results were shown in a previous report 17294.
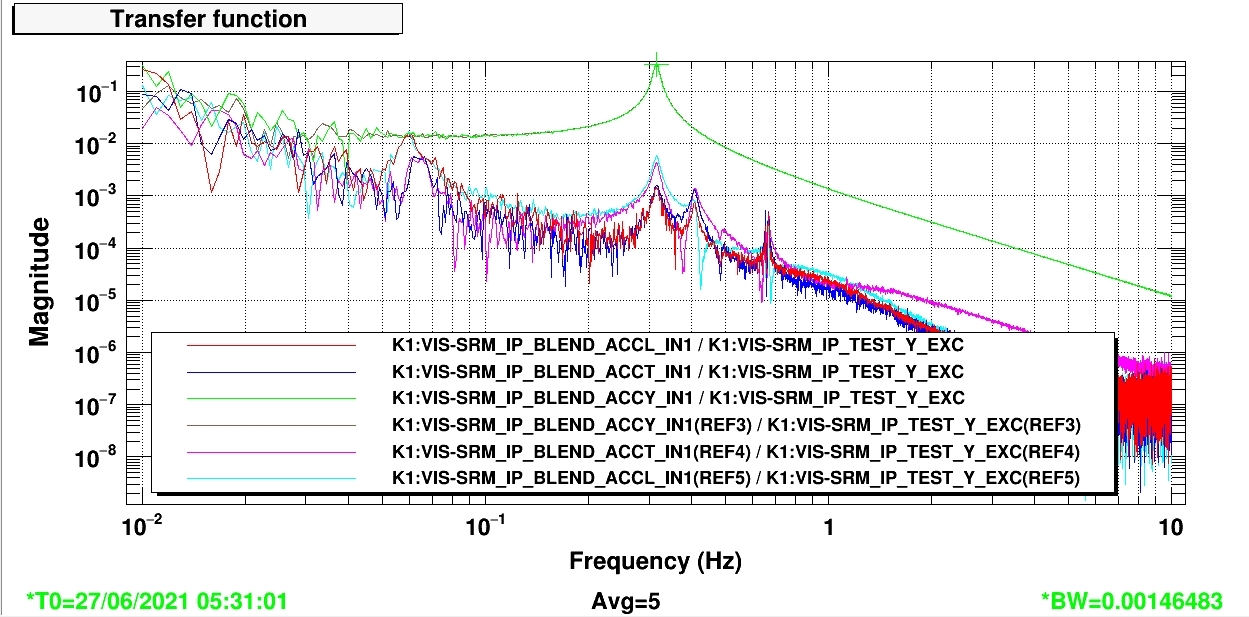
After re-calibrating the geophones and inter-calibrating them with the LVDTs, the phase response of the geophones got much better, in the sense that I see ~0 or ~180 degrees sensor coupling at 0.2 Hz when the actuation was injected. However, upon diagonalization, although the sensor coupling at 0.2 Hz was reduced, but transfer function (both diagonal and cross) measurements shows that there are still some couplings at the resonances, indicating that the sensor couplings may be frequency-dependent as well. This cannot be fixed unless we can obtain a much better calibration filter somehow. So, I gave up using this 0.2 Hz method and returned to the method which was used to diagonalize the LVDTs in 17180.
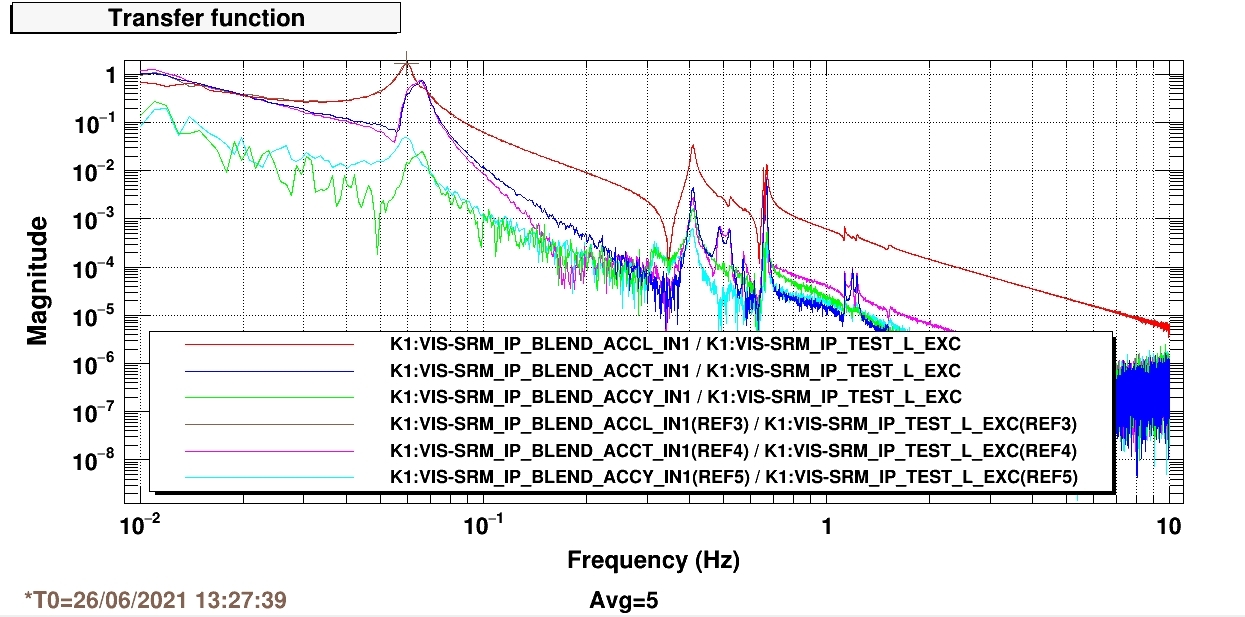
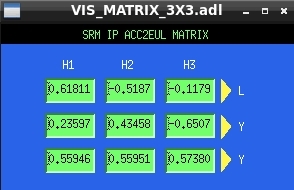
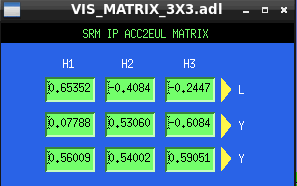
The results were shown in Fig. 4-6. References are measured with old sensing matrix. As can be seen, I cannot completely get rid of the couplings. This can easily be told from the transfer functions with yaw actuation. I suspect this is because of the phase mismatch between sensors. So, again, we will need much better calibration filters if we want to fix this. From the longitudinal actuation transfer functions, we can clearly see some transverse to yaw coupling however this was not obvious from the transverse actuation transfer functions. When I reduce one of them, the other one increase. This was strange but I don't want to fix it as geophones are not important at those frequencies anyway. For geophones, I don't get an ACCALIGN matrix like the LVDTs, so I modified the ACC2EUL matrix and it's shown in Fig. 7.
All measurement files are located in /kagra/Dropbox/Subsystems/VIS/vis_commissioning/











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}