PEM (Center)tatsuki.washimi - 15:15 Monday 01 December 2025 (35724)
Print this reportComment to PEM injection 251127 (35685)
Analysis for
4. Shake injection to TMSX table EXC2 11/27 12:45:00 - 12:58:00 (JST) EXC : K1:PEM-EXCITATION_EX0_RACK_2_EXC REF : K1:PEM-PORTABLE_EXC_RACK_EX0_ADC0_DSUB26_OUT_DQ Info : TMSX EXC2 1 - 10 Hz 10 points 1 Hz resolution 60 seconds at one point 500cnt excitation
Any significant excess was not found in the strain.
Also, no significant excess was found at 1-10 Hz in the QPD, but (almost) due to the harmonics of the shaker vibration itself, some overestimated projections are found over 10 Hz.
Images attached to this comment
PEM (Center)tatsuki.washimi - 14:35 Monday 01 December 2025 (35723)
Print this reportComment to PEM injection 251127 (35685)
Analysis for
3. Shake injection to TMSX table EXC2 11/27 12:38:00 - 12:45:00 (JST) EXC : K1:PEM-EXCITATION_EX0_RACK_2_EXC REF : K1:PEM-PORTABLE_EXC_RACK_EX0_ADC0_DSUB26_OUT_DQ Info : TMSX EXC2 10 - 50 Hz 9 points 5 Hz resolution 30 seconds at one point 500cnt excitation (From my eye, wide area injection can be performed from the accelerometer response)
A 40 Hz peak was excited in the strain during the 50 Hz and 25 Hz injections.
Is it an accidental glitch? or a real coupling?
Images attached to this comment
PEM (Center)tatsuki.washimi - 14:02 Monday 01 December 2025 (35722)
Print this reportComment to PEM injection 251127 (35685)
Analysis for
2. Shake injection to TMSX table EXC1 11/27 12:32:00 - 12:38:00 (JST) EXC : K1:PEM-EXCITATION_EX0_RACK_1_EXC REF : K1:PEM-PORTABLE_EXC_RACK_EX0_ADC0_DSUB25_OUT_DQ Info : TMSX EXC1 10 - 50 Hz 9 points 5 Hz resolution 30 seconds at one point 500cnt excitation
Any significant excess was not found in the strain.
Peaks around 40 Hz in the QPDs look like due to optical table vibration.
Images attached to this comment
PEM (Center)tatsuki.washimi - 13:05 Monday 01 December 2025 (35721)
Print this reportComment to PEM injection 251127 (35685)
Analysis for
1. Shake injection to TMSX table EXC1 11/27 12:18:30 - 12:32:00 (JST) EXC : K1:PEM-EXCITATION_EX0_RACK_1_EXC REF : K1:PEM-PORTABLE_EXC_RACK_EX0_ADC0_DSUB25_OUT_DQ Info : TMSX EXC1 1 - 10 Hz 10 points 1 Hz resolution 60 seconds at one point 500cnt excitation (But from my eye, the reference accelerometer response was not good maybe due to the position)
Any significant excess was not found in the strain. (Somehow, the upper limit is larger than the sensitivity in the plot. I need to check my code.)
Some small excesses were found in the QPDs, but they were below the analysis threshold (1.5 times the 90th percentile)
Images attached to this comment
OBS (SDF)takafumi.ushiba - 12:07 Monday 01 December 2025 (35720)
Print this reportComment to Changes of observation.snap during post O4c commissioning (35605)
I checked the SDF diffs found in this morning and partially accepted. Since I could not identified the remaining changes are what we expected, I left them as they are.
k1vissrm (fig1):
Due to the bug of VIS guardian reported in klog35492, the OPTICLIGN_OIFFSET values are changed if suspensions go to TRIPPED state from MISALIGNED state. Since the SRM was once tripped during PEM injection according to klog35685, these changes probably happen accidentially. So, I reverted these changes.
k1visommt1 (fig2):
Since there are mysteris on these SDF diffs, I kept them as they are. Since SDF values accepted in klog35716 are somehow different the EIPCS values at that timing (fig3), we would like to know the procedure of the accepting SDFs to confirm where is the problem. Are SDFs accepted with the procedure written in JGW-G2516706-v6?
k1alspll (fig4):
These changes are related to the work reported in klog35679 and its reply posts. According to klog35680, K1:IMC-SERVO_FASTGAIN was changed but this is typo. The actual channel changed in klog35680 is K1:CARM-SERVO_FASTGAIN (I confirmed it from Tanaka-kun). So, these changes are what we expected, so I accepted these SDFs.
Images attached to this comment
AOS (General)tomotada.akutsu - 8:45 Monday 01 December 2025 (35719)
Print this reportComment to Strange vacuum pressure data; investigating the behavior of TMS-VIS during pumping down (35607)
After the original and its following posts, the TMS-VIS at X end behavoirs during pumping down and with respect to temperature variation were extracted.
Fig. 1 shows the behavoir during pumping down; the largest displacement was in the vertical direction, ~ -20 um. This is consistent with the anticipated buoyancy lost. The average density of the TMS-VIS is the same order with that of the OMC-VIS in design, so the similar vertical displacement will happen also for OMC-VIS during pumping down. Pitch and roll seem a few urad, and this may suggest that the variation of Young modulus among each blade spring might be around or less than 10%.
Fig. 2 (um and urad) shows the behavoir with respect to temperature variation. Uraguchi-san had reported already, in air measurement, the ratio was ~ 20 um/K in the vertical direction, and this figure also supported this estimation is correct in vacuum. This is consistent with the anticipated ratio from the maraging's Young modulus variation ratio with respect to temperature (dE/dT). According to my analysis, if the vertical resonant frequency is the same, and on the earth, dE/dT is the only parameter that determine this ratio, so the same ratio is expected also for OMC-VIS. So, if the center area where OMC-VIS will be located will be stabilized in temperature like in Fig. 2, only a few um variation would happen. In fact, looking at Fig. 1, it appears that the temperature variation affects the displacement in every direction. Pumping down needs to turn on some pumps, so the temperature of X end might raise. To inspect the relation more, it may be nice to have more precisely measurable thermometers....
Due to the suspending structure of TMS-VIS (and OMC-VIS), yaw is coupled with vertical. But this ~ 10 urad thing can be or should be compensated by each suspended optics, including OMMT1, OMMT2, OSTM, and the others.
In summary, if we can well succeed to take balance of optics on OMC-VIS before pumping down, it would be sufficient. It may be nice to attach some heaters and thermometers if possible, but not must.
Images attached to this comment
PEM (EX)takaaki.yokozawa - 4:58 Sunday 30 November 2025 (35718)
Print this reportPEM injection 251130I performed the PEM injection this morning.
3:10 - 3:31 silent run 3:33 - 3:40 test
1. Shake injection to TMSX table EXC2 11/30 03:41:00 - 03:51:00 (JST) EXC : K1:PEM-EXCITATION_EX0_RACK_2_EXC REF : K1:PEM-ACC_TMSX_TABLE_TMS_Z_OUT_DQ Info : Sweep sine injection 1-600 Hz 100 count with 600s
2. Shake injection to TMSX table EXC2 11/30 03:55:00 - 04:00:00 (JST) EXC : K1:PEM-EXCITATION_EX0_RACK_2_EXC REF : K1:PEM-ACC_TMSX_TABLE_TMS_Z_OUT_DQ Info : White injection 400-500 Hz 1000 count
3. Shake injection to TMSX table EXC2 11/30 04:02:00 - 04:07:00 (JST) EXC : K1:PEM-EXCITATION_EX0_RACK_2_EXC REF : K1:PEM-ACC_TMSX_TABLE_TMS_Z_OUT_DQ Info : White injection 300-400 Hz 2000 count
4. Shake injection to TMSX table EXC2 11/30 04:08:00 - 04:13:00 (JST) EXC : K1:PEM-EXCITATION_EX0_RACK_2_EXC REF : K1:PEM-ACC_TMSX_TABLE_TMS_Z_OUT_DQ Info : White injection 200-300 Hz 2000 count
5. Shake injection to TMSX table EXC2 11/30 04:14:00 - 04:19:00 (JST) EXC : K1:PEM-EXCITATION_EX0_RACK_2_EXC REF : K1:PEM-ACC_TMSX_TABLE_TMS_Z_OUT_DQ Info : White injection 100-200 Hz 2000 count
6. Shake injection to TMSX table EXC2 11/30 04:20:00 - 04:25:00 (JST) EXC : K1:PEM-EXCITATION_EX0_RACK_2_EXC REF : K1:PEM-ACC_TMSX_TABLE_TMS_Z_OUT_DQ Info : White injection 50-100 Hz 3000 count
7. Shake injection to TMSX table EXC2 11/30 04:26:00 - 04:31:00 (JST) EXC : K1:PEM-EXCITATION_EX0_RACK_2_EXC REF : K1:PEM-ACC_TMSX_TABLE_TMS_Z_OUT_DQ Info : White injection 1-50 Hz 3000 count
7. Shake injection to TMSX table EXC1 11/30 04:32:00 - 04:37:00 (JST) EXC : K1:PEM-EXCITATION_EX0_RACK_1_EXC REF : K1:PEM-PORTABLE_EXC_RACK_EX0_ADC0_DSUB26_OUT_DQ Info : White injection 1-50 Hz 3000 count
8. Shake injection to TMSX table EXC3 11/30 04:39:00 - 04:49:00 (JST) EXC : K1:PEM-EXCITATION_EX0_RACK_3_EXC REF : K1:PEM-PORTABLE_EXC_RACK_EX0_ADC0_DSUB27_OUT_DQ Info : Sweep sine injection 1-600 Hz 100 count with 600s
9. Shake injection to TMSX table EXC4 11/30 04:50:00 - 04500:00 (JST) EXC : K1:PEM-EXCITATION_EX0_RACK_4_EXC REF : K1:PEM-PORTABLE_EXC_RACK_EX0_ADC0_DSUB28_OUT_DQ Info : Sweep sine injection 1-600 Hz 100 count with 600s
OBS (SDF)takaaki.yokozawa - 3:29 Sunday 30 November 2025 (35716)
Print this reportComment to Changes of observation.snap during post O4c commissioning (35605)I accepted the following SDFs related to the initial alignment. https://klog.icrr.u-tokyo.ac.jp/osl/?r=35717
Images attached to this comment
MIF (General)takaaki.yokozawa - 3:29 Sunday 30 November 2025 (35717)
Print this reportInitial alignment 251130Since I noticed that the IFO cannot be locked more than 12 hours, I performed the initial alignment. After it we can lock the IFO.
I noticed current PSL HWP rotated too much and IMC output power is not max.
Images attached to this report
PEM (EX)takaaki.yokozawa - 8:57 Saturday 29 November 2025 (35715)
Print this reportComment to PEM injection 251129 (35714)I restarted the auto measurement script since even the IFO can be locked, very limiting time would be remained before the 10:00
PEM (EX)takaaki.yokozawa - 8:15 Saturday 29 November 2025 (35714)
Print this reportPEM injection 251129I performed the PEM injection this morning.
Before starting the measurement, I confirmed the auto measurement script requested the OBSERVATION state, so I started, but auto measurement script stopped the PEM excitation and started the OBSERVATION run, so I killed the script by performing the control+C.
Silent run 6:45 - 7:07
1. Shake injection to TMSX table EXC1 11/29 07:14:00 - 07:24:00 (JST) EXC : K1:PEM-EXCITATION_EX0_RACK_1_EXC REF : K1:PEM-PORTABLE_EXC_RACK_EX0_ADC0_DSUB25_OUT_DQ Info : Sweep sine injection 1-600 Hz 100 count with 600s
2. Shake injection to TMSX table EXC1 11/29 07:26:00 - 07:34:00 (JST) EXC : K1:PEM-EXCITATION_EX0_RACK_1_EXC REF : K1:PEM-PORTABLE_EXC_RACK_EX0_ADC0_DSUB25_OUT_DQ Info : White injection 400-500 Hz 1000 count
3. Shake injection to TMSX table EXC1 11/29 07:36:00 - 07:41:00 (JST) EXC : K1:PEM-EXCITATION_EX0_RACK_1_EXC REF : K1:PEM-PORTABLE_EXC_RACK_EX0_ADC0_DSUB25_OUT_DQ Info : White injection 300-400 Hz 2000 count
4. Shake injection to TMSX table EXC1 11/29 07:42:00 - 07:47:00 (JST) EXC : K1:PEM-EXCITATION_EX0_RACK_1_EXC REF : K1:PEM-PORTABLE_EXC_RACK_EX0_ADC0_DSUB25_OUT_DQ Info : White injection 200-300 Hz 2000 count
5. Shake injection to TMSX table EXC1 11/29 07:48:00 - 07:53:00 (JST) EXC : K1:PEM-EXCITATION_EX0_RACK_1_EXC REF : K1:PEM-PORTABLE_EXC_RACK_EX0_ADC0_DSUB25_OUT_DQ Info : White injection 100-200 Hz 2000 count
6. Shake injection to TMSX table EXC1 11/29 07:54:00 - 07:59:00 (JST) EXC : K1:PEM-EXCITATION_EX0_RACK_1_EXC REF : K1:PEM-PORTABLE_EXC_RACK_EX0_ADC0_DSUB25_OUT_DQ Info : White injection 50-100 Hz 3000 count
During the measurement 0 - 100 Hz white injection locked loss happened.
Comments to this report:
takaaki.yokozawa - 8:57 Saturday 29 November 2025 (35715)
Print this reportI restarted the auto measurement script since even the IFO can be locked, very limiting time would be remained before the 10:00
MIF (Noise Budget)kenta.tanaka - 22:35 Friday 28 November 2025 (35713)
Print this reportComment to Automeasurement of the transfer functions for Type-A suspension noise budget (35627)
I (may) run the automeasurement script for TypeA noise budget on the k1ctr4 PC. This script will work until 4:50 JST because tomorrow PEM work will start from 5:00 JST. If the script still run even after 5:00 JST, please stop the script runing on k1ctr4 by interrupting the script with Ctrl+C.
DGS (General)takahiro.yamamoto - 21:33 Friday 28 November 2025 (35712)
Print this reportSoftware update of gateway serverSoftware update including security fix was done on k1gate. To launch updated services k1gate was rebooted around 15:30.
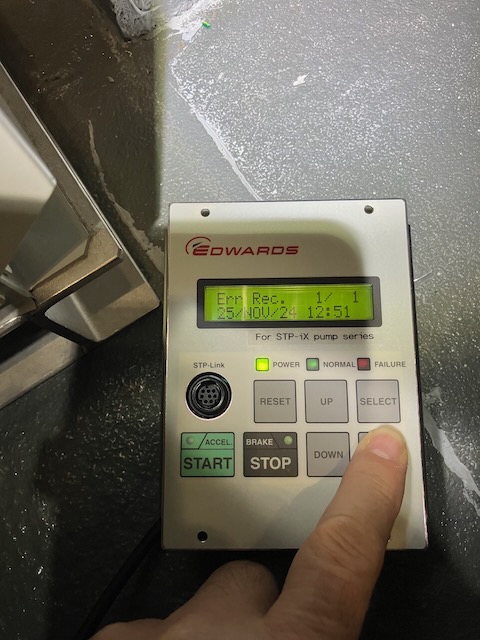
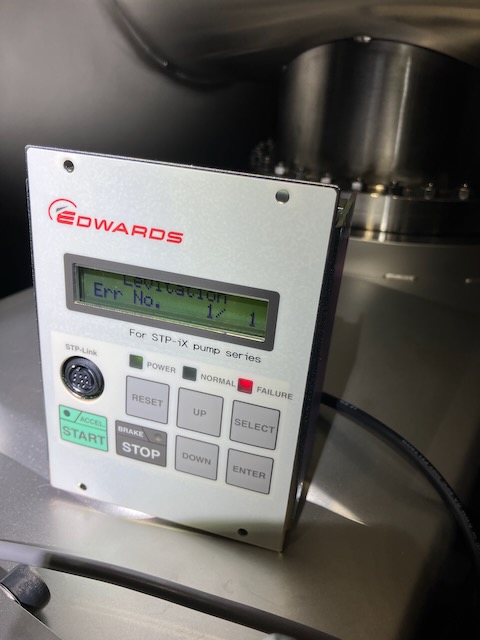
[Kimura. Yasui, M.Takahashi and H.Sawada] M. Takahashi-san and H. Sawada-san found during their weekly inspection that the TMP for X-end #37 had stopped. After receiving their report, I confirmed the situation on-site. The #37 TMP had stopped, displaying “DRV Overload”. The cause of the stoppage was overload due to the dry pump connected to the TMP stopping. The dry pump for #37 displayed an “ES1.4” error. (The upstream gate valve of the TMP was closed, so no vacuum leak occurred due to this failure.) This error indicates a “ground fault,” suggesting a failure in the inverter circuit controlling the motor. As a temporary action, the main breakers for the TMP and dry pump were turned OFF, and a “Do Not Operate” sign was posted. To determine the exact time the dry pump failure occurred, the TMP error log was checked. The internal timer recorded the TMP error occurrence time as November 24, 2025, at 12:51. The TMP internal clock was delayed by 1 hour and 10 minutes relative to actual time. Therefore: TMP shutdown time: November 24, 2025, at 14:01 Estimated time of dry pump failure: November 24, 2025, 13:31 This failure is estimated to be unrelated to the earthquake that occurred around 18:53.
Note (Manual Explanation): “DRV Overload”: Motor Driver Overload If the TMP fails to reach its rated rotational speed within approximately 30 minutes after startup, or if it remains in an accelerated state for approximately 30 minutes during operation, the TMP will decelerate and stop.
Images attached to this comment
OBS (SDF)ryutaro.takahashi - 9:45 Friday 28 November 2025 (35710)
Print this reportComment to Changes of observation.snap during post O4c commissioning (35605)
I accepted the following SDFs related to the offload.
Images attached to this comment
VIS (IY)ryutaro.takahashi - 9:42 Friday 28 November 2025 (35709)
Print this reportComment to Drift of BF GAS (30350)
I offloaded the BF GAS with the FR.
PEM (Center)takaaki.yokozawa - 9:37 Friday 28 November 2025 (35707)
Print this reportTest for the white noise injection to TMSXBy performing the band pass filter, we can confirm that we can inject the white noise with well excitation. After locking the IFO, I will try to do it. Fig.1. 100-200 Hz band pass injection Fig.2. 0-10 Hz low pass excitation signal Fig.3. 0-10 Hz injection and acc responses
Images attached to this report
Safety (General)dan.chen - 9:34 Friday 28 November 2025 (35708)
Print this reportMortar Flaking Inside the Tunnel
With Shingo Hido
While driving near the 2500 m area of the Y-arm on November 27, we found small fragments of what appeared to be mortar scattered on the floor. We mistakenly thought this was the issue reported in klog35666, so we did not take any photos at the time. However, klog35666 refers to the X-arm, so it is unrelated to what we found on November 27. Additional inspection is likely needed.
As I checked quickly, the calcenter01 seems to be rebooted on 2025-11-26 10:53:22 JST (I used `uptime -s`). I wonder the daemon process for the fitting was turned off at that time.
And also, I found the disc space (/dev/sdd1) of calceneter01 seems to be full. I'm not sure if this is a trigger of rebooting. Note that the images which consume a large ammount of disc space are stored in the different disc of /dev/sdc1.
CAL (General)hirotaka.yuzurihara - 9:02 Friday 28 November 2025 (35704)
Print this reportTCam photo session 20251128
I took the TCam photos for commissioning at 08:35 ~ 08:40 this morning. The previous work is klog35660.
After taking the photos, the fitting process usually started to analyze the images. But, this time the process was not launched automatically. I'm checking the cause.
Comments to this report:
hirotaka.yuzurihara - 9:26 Friday 28 November 2025 (35706)
Print this report
As I checked quickly, the calcenter01 seems to be rebooted on 2025-11-26 10:53:22 JST (I used `uptime -s`). I wonder the daemon process for the fitting was turned off at that time.
And also, I found the disc space (/dev/sdd1) of calceneter01 seems to be full. I'm not sure if this is a trigger of rebooting. Note that the images which consume a large ammount of disc space are stored in the different disc of /dev/sdc1.
MIF (General)takafumi.ushiba - 8:52 Friday 28 November 2025 (35705)
Print this reportComment to IRXY trends from August to November (35702)
Though I'm not so sure this is related to the transmission power, I changed the BPC offsets on 6 November (klog35504). Before the adjustment, beam spot on ETMY should be drifting in yaw as optical gain reduces.
MIF (Noise Budget)hirotaka.yuzurihara - 8:44 Friday 28 November 2025 (35703)
Print this reportComment to Automeasurement of the transfer functions for Type-A suspension noise budget (35627)
For the TCam photo session, we stopped the script at around 8:40. (But, due to the large microseicm, it's difficult to lock the interferometer in OBSERVATION state.....)
MIF (General)shinji.miyoki - 0:05 Friday 28 November 2025 (35702)
Print this reportIRXY trends from August to November
Fig.1 shows the IRXY trans power changes between just before the laser accident in August and November 27th.
White dotted lines are just put to connect between just before the accident and just after the recovery. The reduction rate changed around 70~65 for both. Especially, the IRY was over IRX. As you know IRX was larger than IRY for a long time. In addition, IRY started increasing. Why?? Are the beam spots at the same position as before in each sapphire mirror?
Images attached to this report
Comments to this report:
takafumi.ushiba - 8:52 Friday 28 November 2025 (35705)
Print this report
Though I'm not so sure this is related to the transmission power, I changed the BPC offsets on 6 November (klog35504). Before the adjustment, beam spot on ETMY should be drifting in yaw as optical gain reduces.
MIF (Noise Budget)kenta.tanaka - 23:21 Thursday 27 November 2025 (35701)
Print this reportComment to Automeasurement of the transfer functions for Type-A suspension noise budget (35627)
I (may) run the automeasurement script for TypeA noise budget on the k1ctr3 PC. This script will work until 4:50 JST because tomorrow PEM work will start from 5:00 JST. If the script still run even after 5:00 JST, please stop the script runing on k1ctr3 by interrupting the script with Ctrl+C.
(This script seems not to print any log on terminal screen? "_logging" function seems to be commented.)
MIF (Noise Budget)kenta.tanaka - 21:20 Thursday 27 November 2025 (35700)
Print this reportPreparation of TF measurement templates for noise budget of Type-B, Bp suspensions control noise is on going
We prepare TF measurement templates for noise budget of Type-B, Bp suspensions control noise. We already prepared template files for all Type Bs and Bps but we have not adjusted the excitation amplitude. Tomorrow, we will continue this work.

.png)
.png)
.png)
.png)
.png)
.png)
.png)

.png)
.png)
.png)
.png)
.png)
.png)
.png)

.png)
.png)
.png)
.png)
.png)
.png)
.png)

.png)
.png)
.png)
.png)
.png)
.png)
.png)





















{kind=link}
.png){kind=link}
.png){kind=link}
.png){kind=link}
.png){kind=link}
.png){kind=link}
.png){kind=link}
.png){kind=link}
{kind=link}
.png){kind=link}
.png){kind=link}
.png){kind=link}
.png){kind=link}
.png){kind=link}
.png){kind=link}
.png){kind=link}
{kind=link}
.png){kind=link}
.png){kind=link}
.png){kind=link}
.png){kind=link}
.png){kind=link}
.png){kind=link}
.png){kind=link}
{kind=link}
.png){kind=link}
.png){kind=link}
.png){kind=link}
.png){kind=link}
.png){kind=link}
.png){kind=link}
.png){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}