6/12/2019
Continuing from 9199,
I would like to damp the 0.16 Hz Yaw motion because it was causing MICH lock to be unstable. Tackled the problem from two angles, improving OL and IP damping.
I put on a wind shield covering the BS OL. So we can study the residual motion and the performance of the damping controls. After that, I ran another round of OL diagonalization for the BS.
| TILT_PIT | TILT_YAW | LEN_PIT | LEN_YAW | |
| L | 0.1909485 | -0.02438947 | -6.0203077 | -0.32236393 |
| P | 1.74172977 | -0.04659599 | 2.92700391 | 0.15672961 |
| Y | 0.06502262 | 1.95176406 | 0 | 0 |
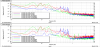
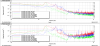
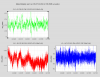
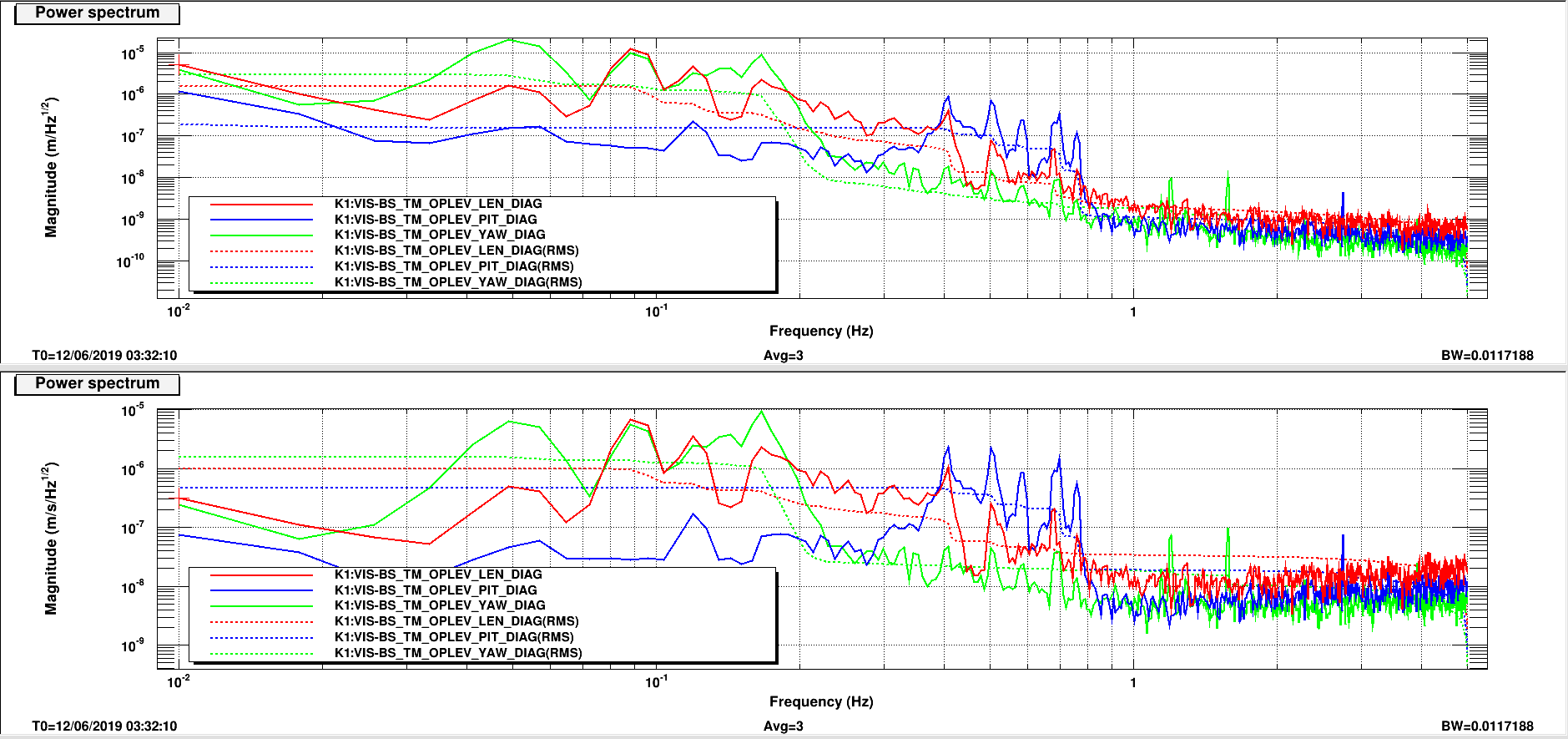
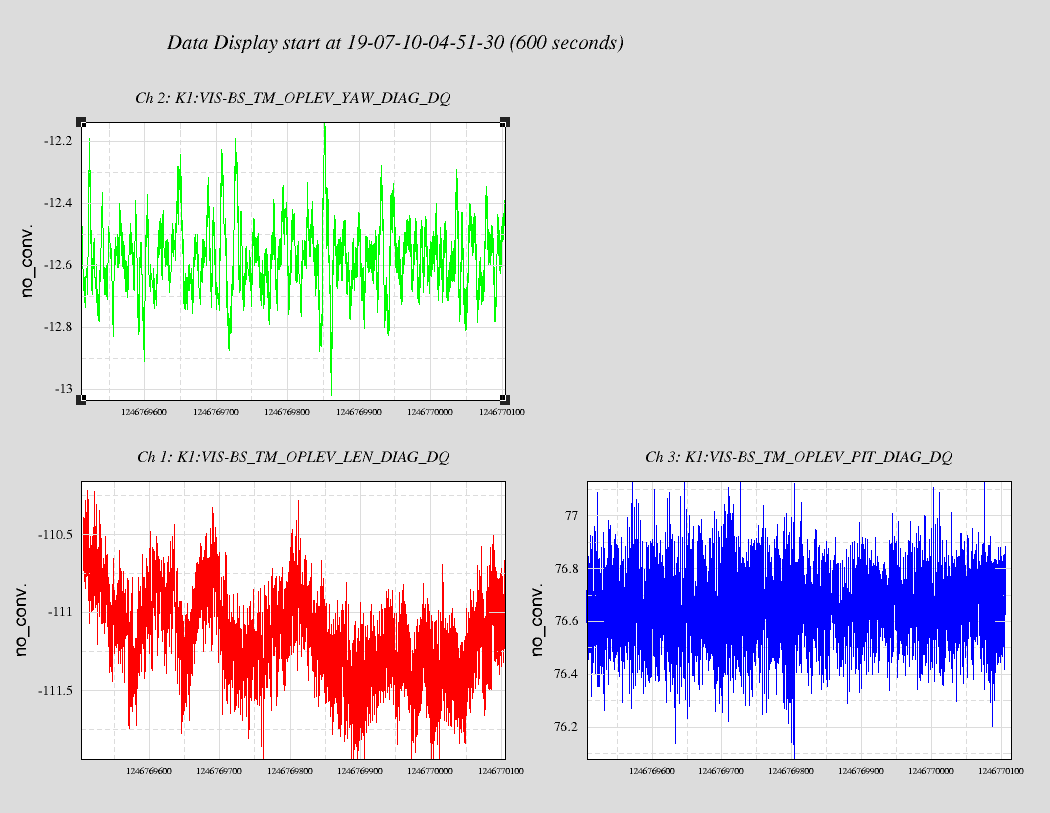
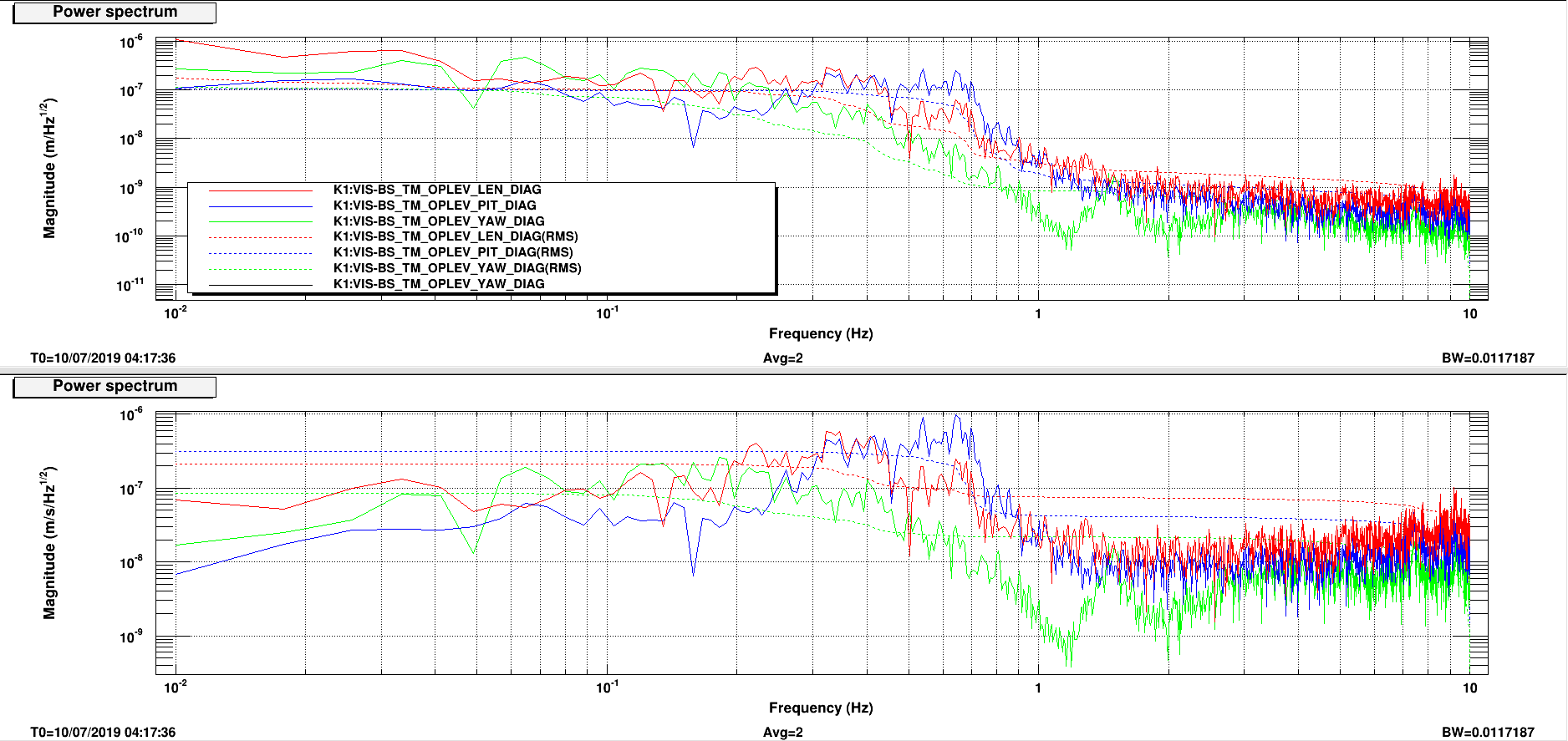
I copied the blending filter from 9184 which is the blending filter for IP L, to IP T and IP Y and crank the damping gains in the inertial damping filter by factors of tens. This helped damping the 0.16 Hz Yaw motion by at least a factor of 10. Figure 1 and 2 shows the the undamped and damped residual motion of BS. As can be seen, at 0.16 Hz, the residual displacement dropped from 10 µrad/rHz to lower than 1 µrad/rHz. For reference, I attached a third figure to show the residual motion measured when there no windshield.
After this improvement, the BS no longer caused problem to the MICH lock (seemingly).
The residual motion of the BS shown in figure 2 also suggests that the lock aquisition requirements are met easily.
| Requirement | Result | |
| Longitudinal | 0.4 µm | 0.217 µm |
| Pitch | 1 µrad | 0.0782 µrad |
| Yaw | 1 µrad | 0.135 µrad |
| Requirement | Result | |
| Longitudinal | 0.5 µm/s | 0.3 µm/s |
| Pitch | / | 0.193 µrad/s |
| Yaw/ | / | 0.132 µrad/s |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}