I found that somebody has implemented the blending filter before, but to harmonize with the SRs, I chose to redo those following the procedure described in 9064.
I modifed the geophone calibration filter so the DC cutoff is a 4th order HP at 0.003 Hz. And, I put an integrator to covert the signal to displacement before blending. I measured geophone phone signals and compared it with tangential displacement measured by LVDT yaw, and did correction as calibration factor in the input filters (cal). See figure 1.
I injected 2 Hz actuation in L, T and Y and did diagonalization on geophones. See new sensing matrix below:
| ACC H1 | ACC H2 | ACC H3 | |
| L | 0.78375 | -0.4459 | -0.2643 |
| T | 0.09342 | 0.76137 | -0.7158 |
| Y | 0.70815 | 0.68294 | 0.5758 |
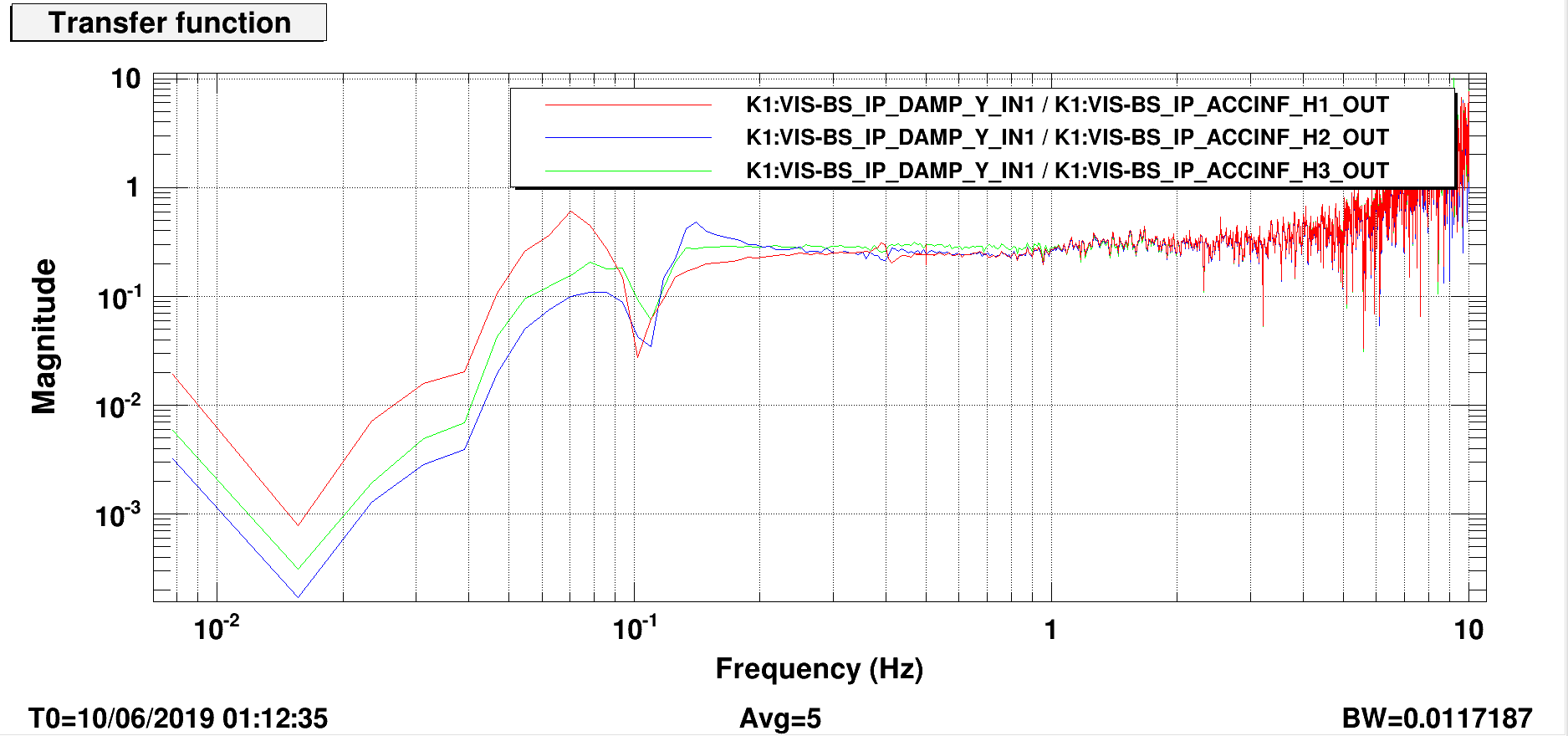
Using this matrix, I measured L, T, Y TFs from actuation to LVDT sensing and geophone sensing and compared the TFs of LVDTs and geophones. They are quite similar. The LVDT and geophone signals have good coherence above 50 mHz and below 1 Hz.
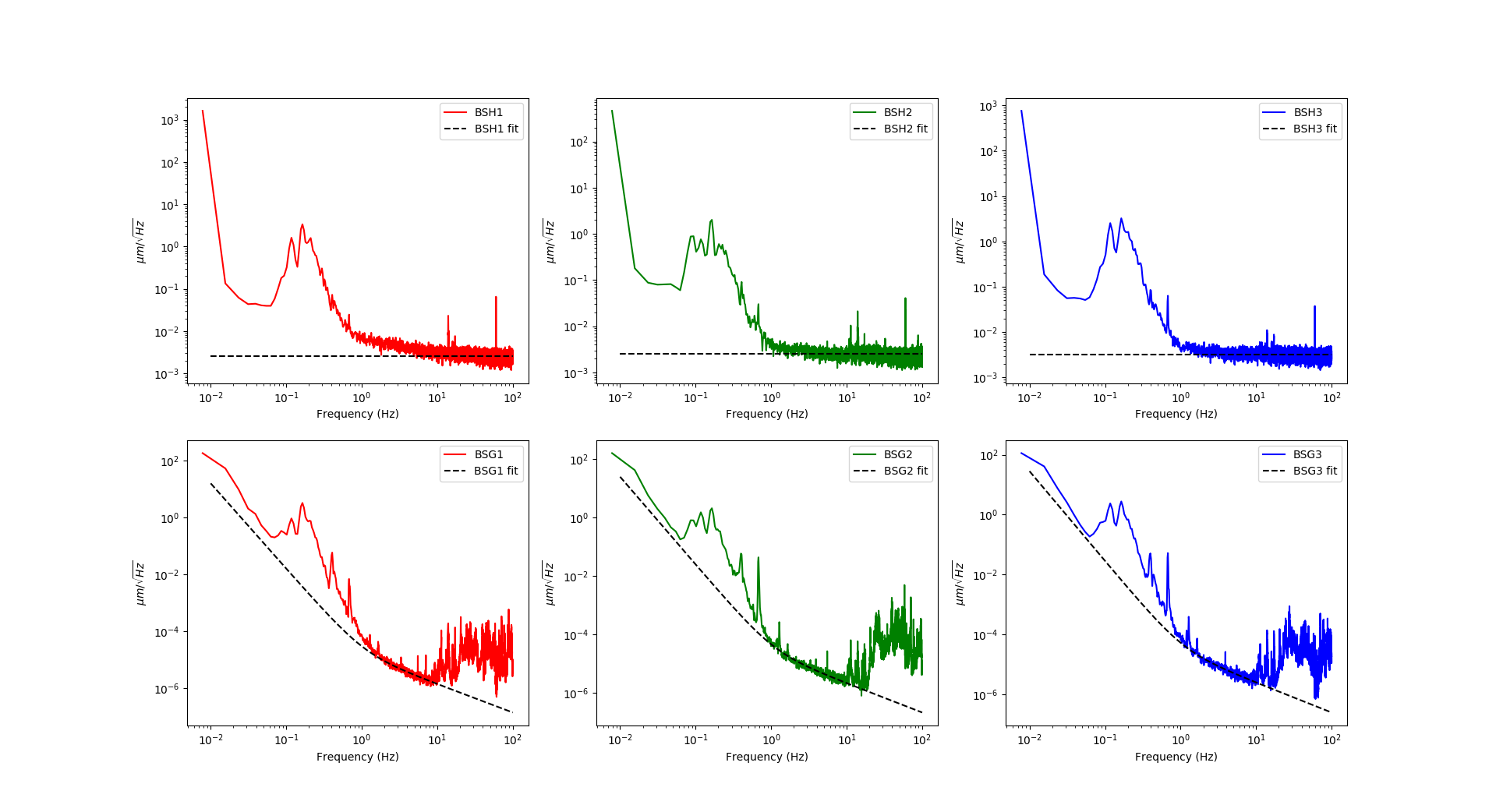
I measrued and fit LVDT and geophone intrinsic noise for later optimization purpose. See figure 2.
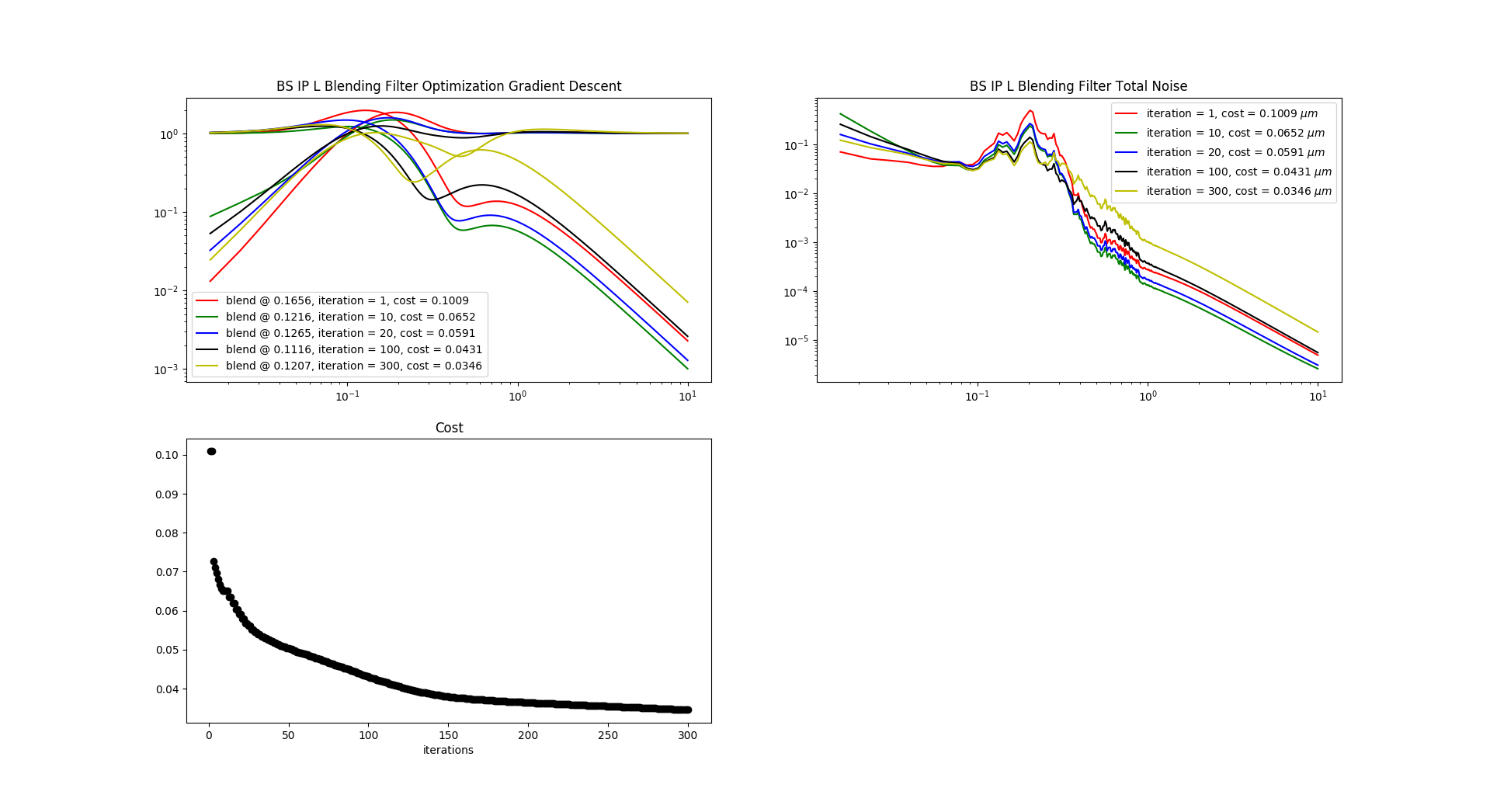
Using the same alogrithm as 9064, I tried to find the best blending filter for the BS. See figure 3. This time, the program generated a blending filter with a strange shape which has three crossover frequencies but then the rms noise level was suppressed by almost 3 times. So, I am willing to try this filter because it it is so good. I did adjust the learning rates and the way the program generates gradient. So, it might be the reason why the final result is different from that of SRM.
I copied damping filter from normal damping to the inertial damping block and tested the performance. The result looks good because it can damping the motion while remaining stable.
Can anyone tell if this blending filter is suitable? It has a super strange shape but it seemingly works.



{kind=link}
{kind=link}
{kind=link}