C.Hirose K.Tanaka
We tried changing actuater from IMMT1 and PR2 to IY and EY because WFS are not seem to detect IMMT2 and PR2 angle singal. ( klog23101 : About that work, we didn't try to measure PLANT using swept sin. It is possible that PLANT was measured. But the power spectrum results didn't seem to show it in WFS. )
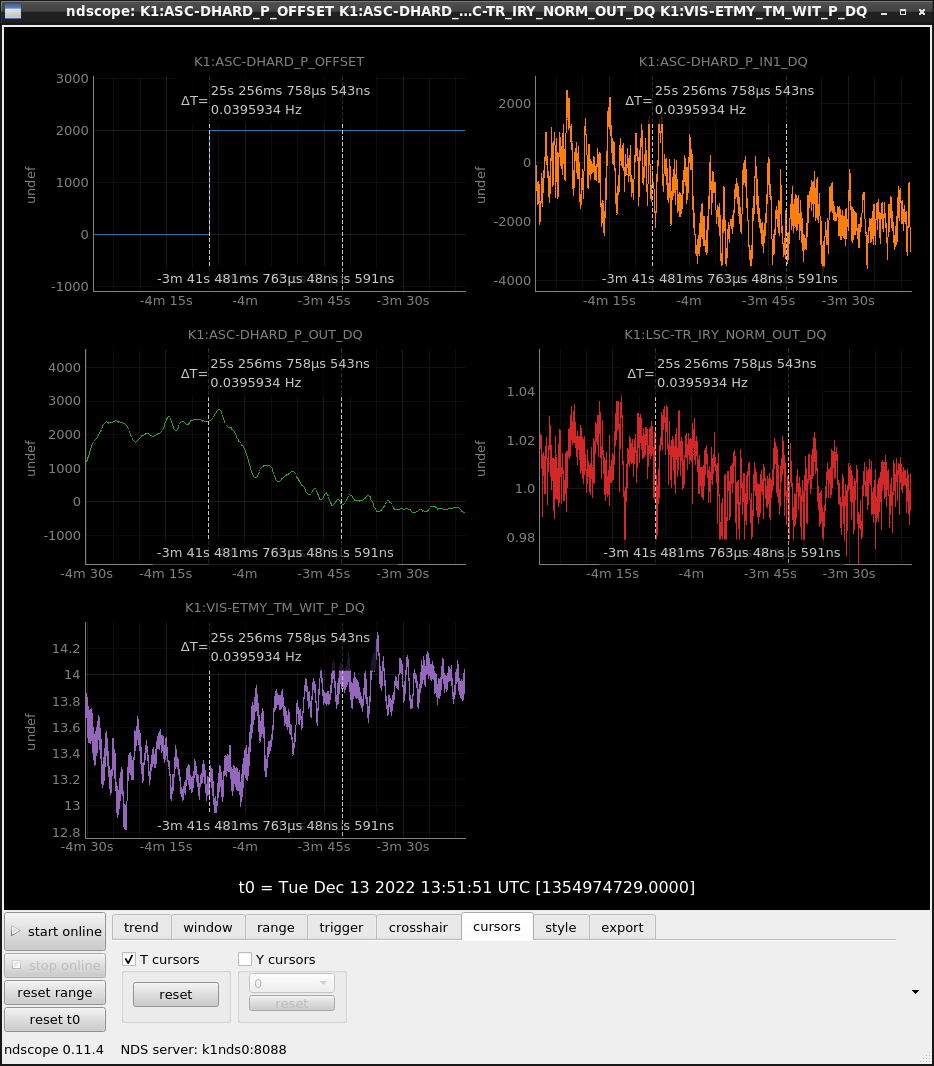
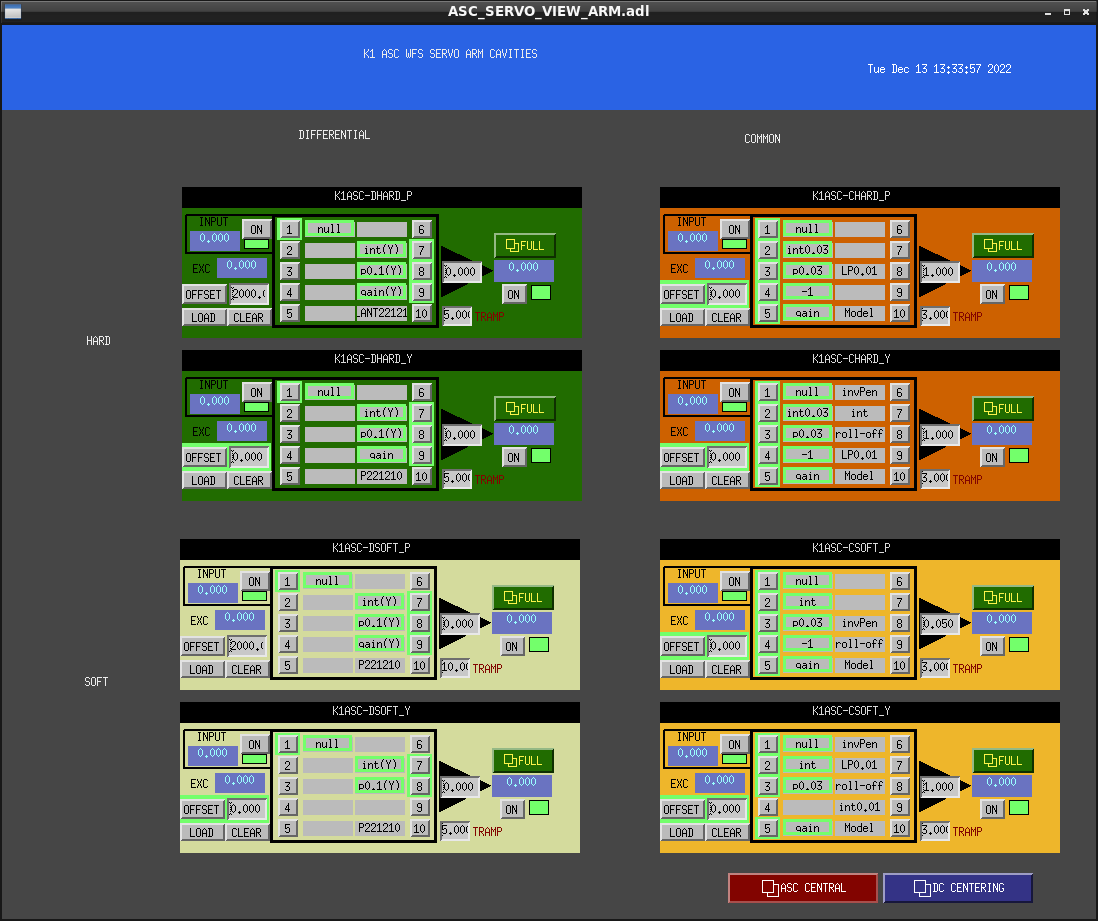
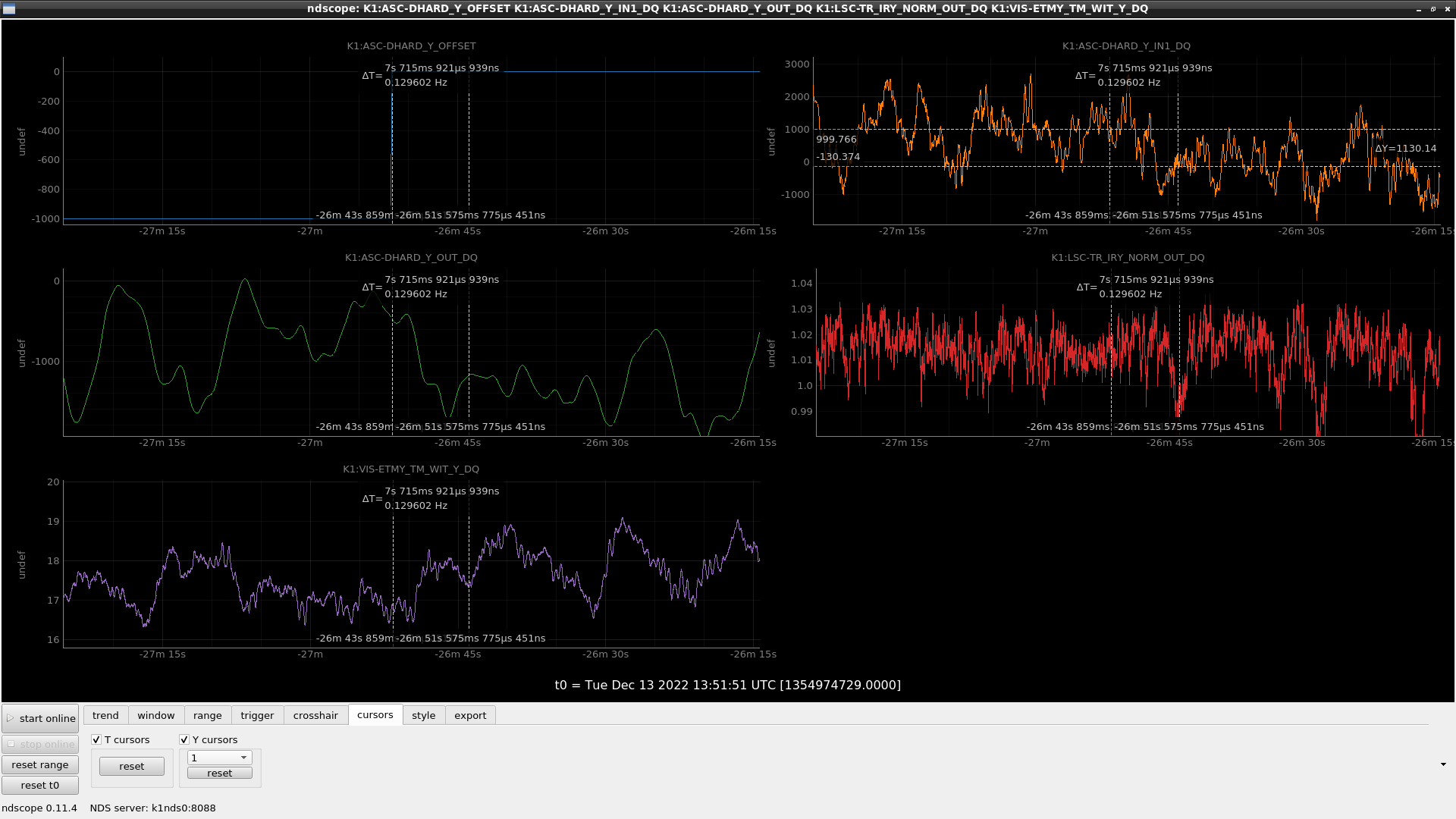
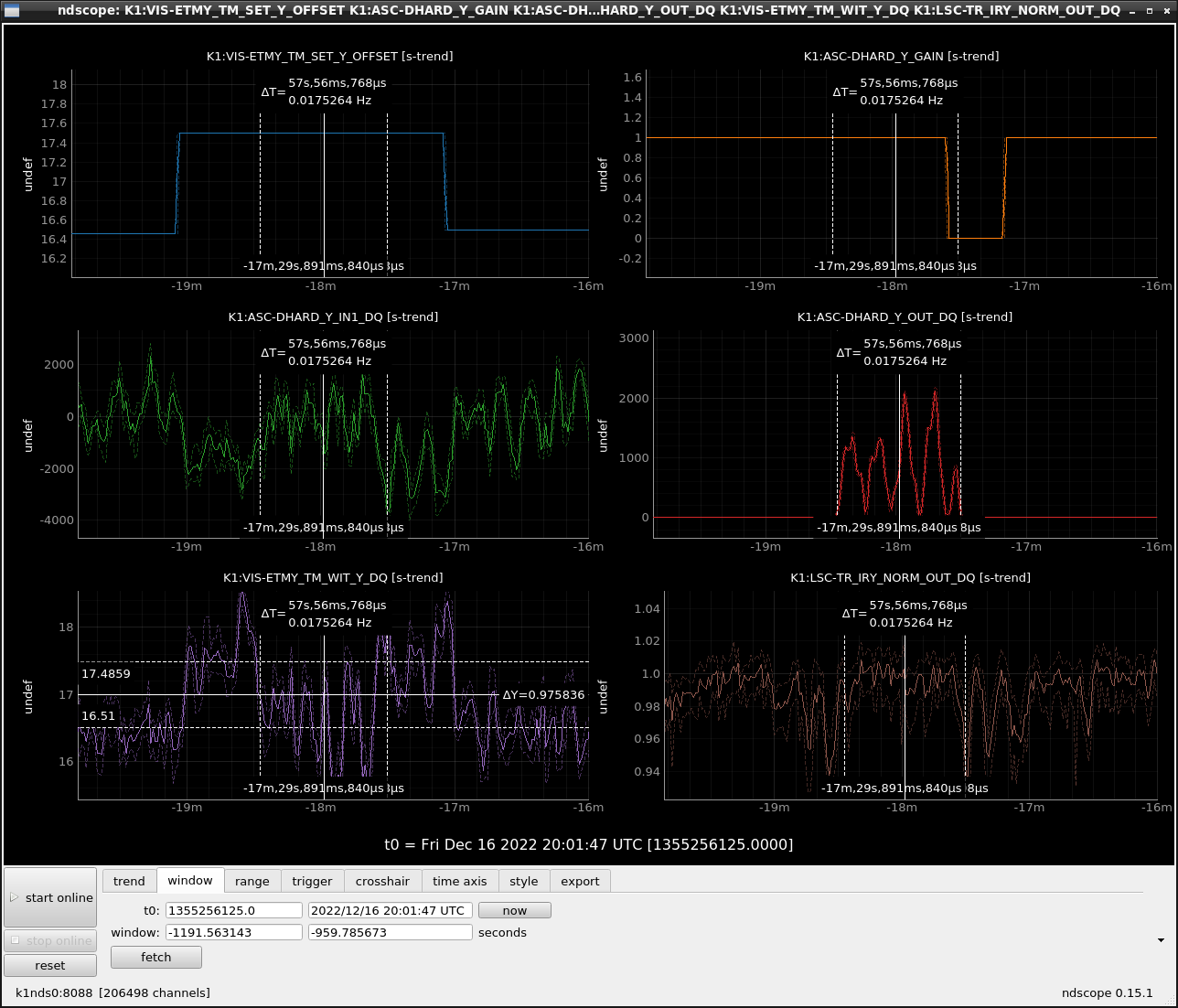
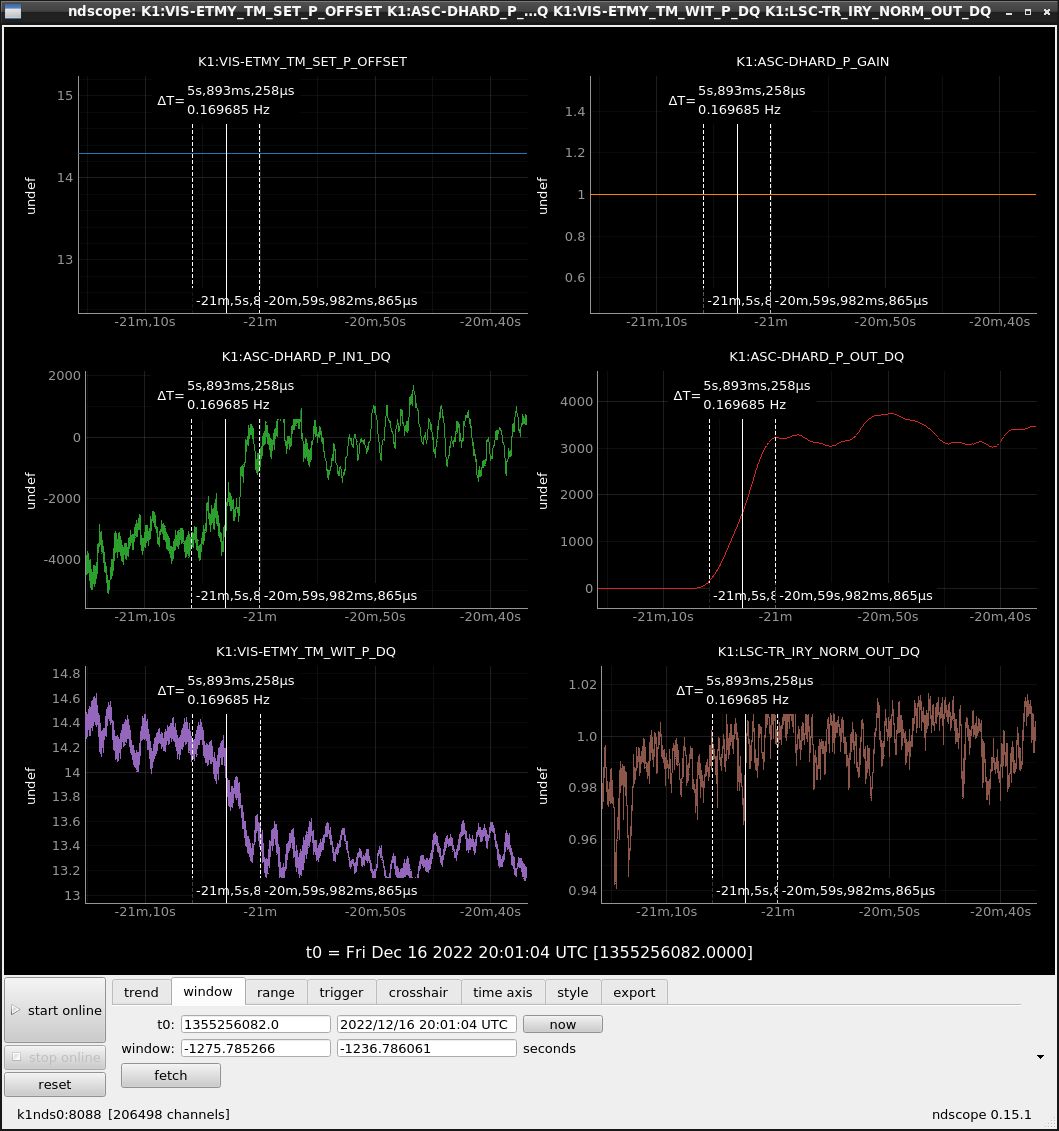
We could close Yarm ASC and the feedback was successful because the error moved when the offset was changed.
We will soon measure open loop transfer function and intensity noise, etc.
Preparation
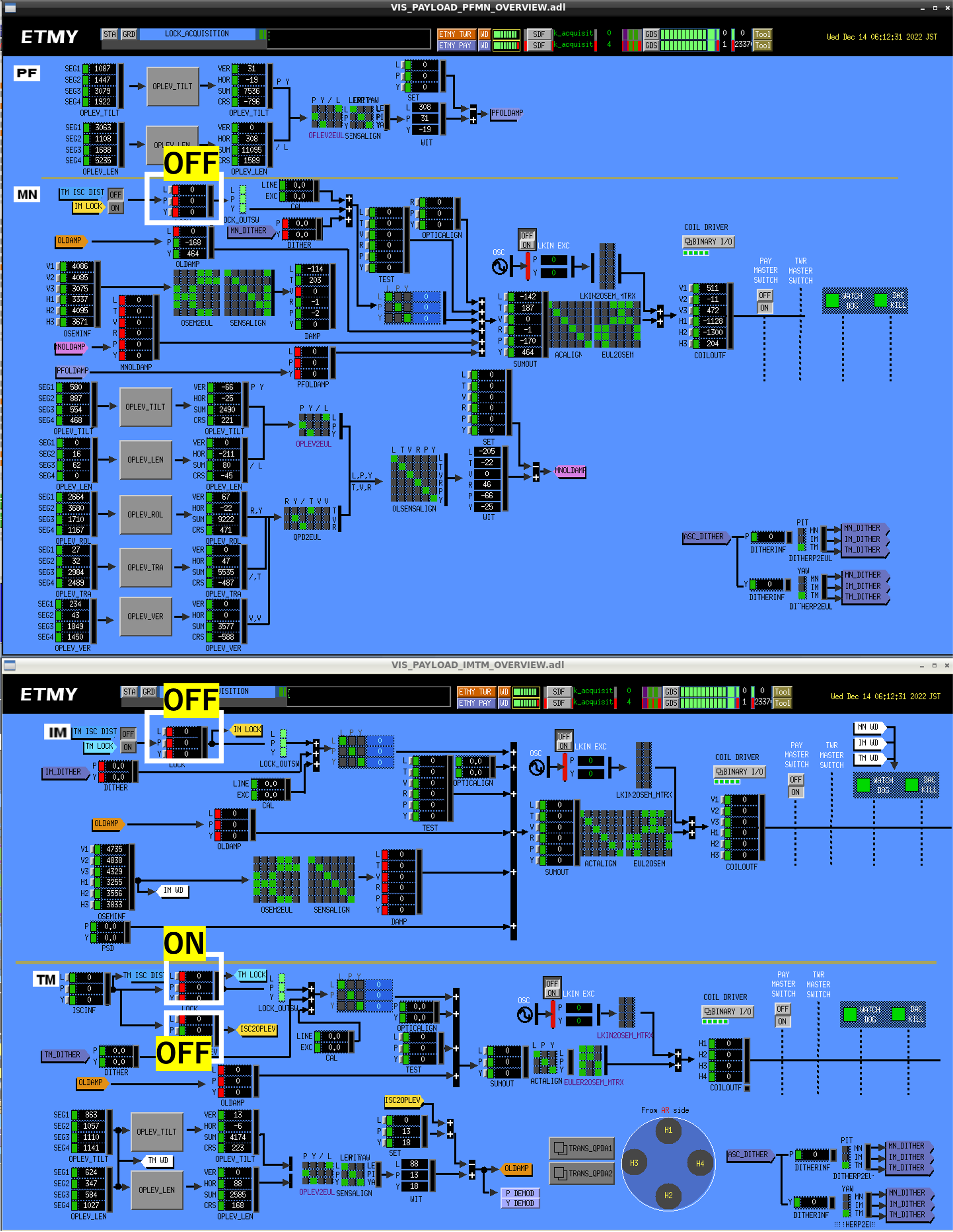
- IY and EY with OLDAMP (TM -> MI) turned on and ADS(TMSY -> IMMT2,PR2) turned on (like klog23026).
After the ADS settled down, both were turned off. - (Preparation turning on ASC) Pass IY, EY control paths.
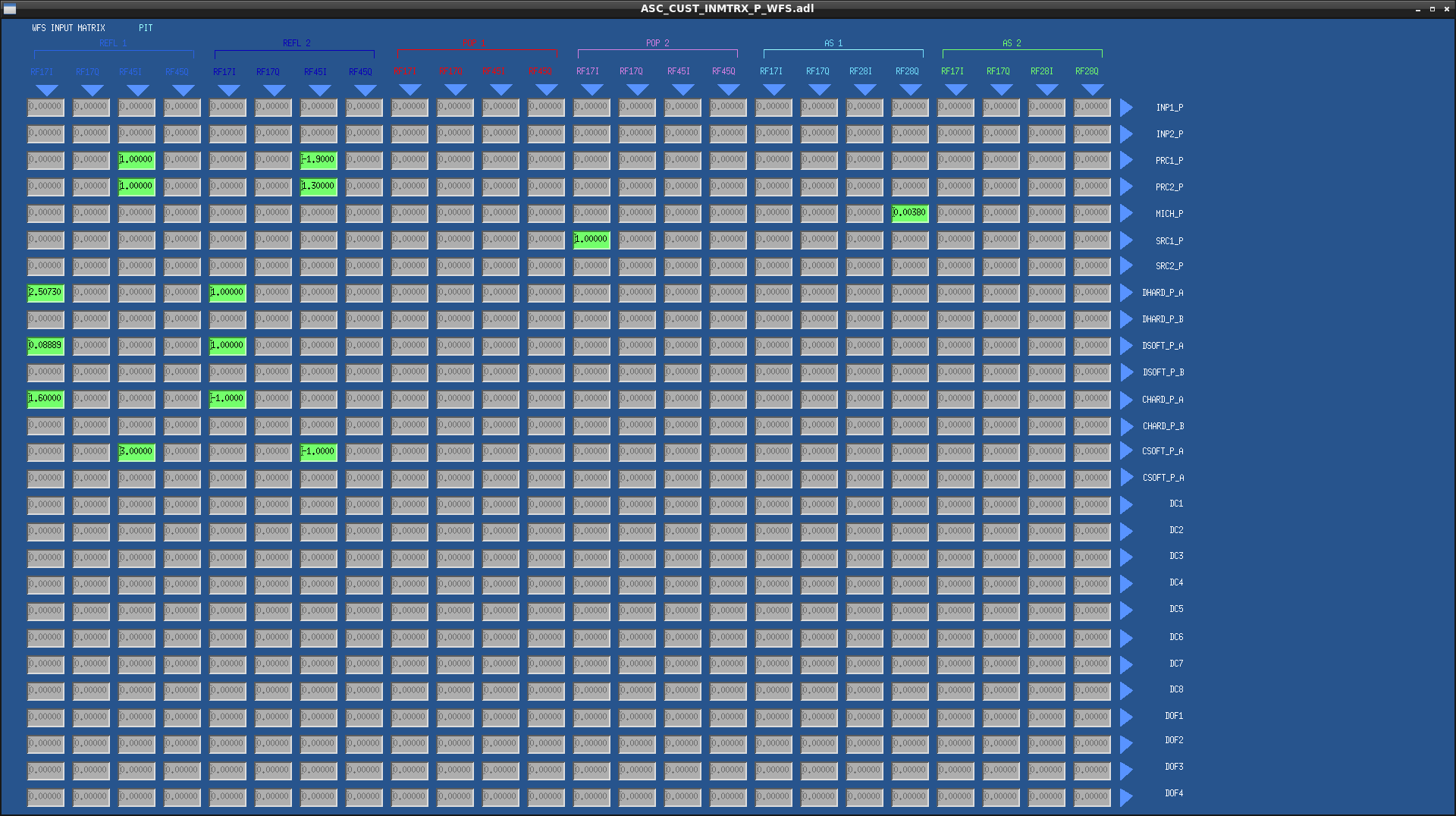
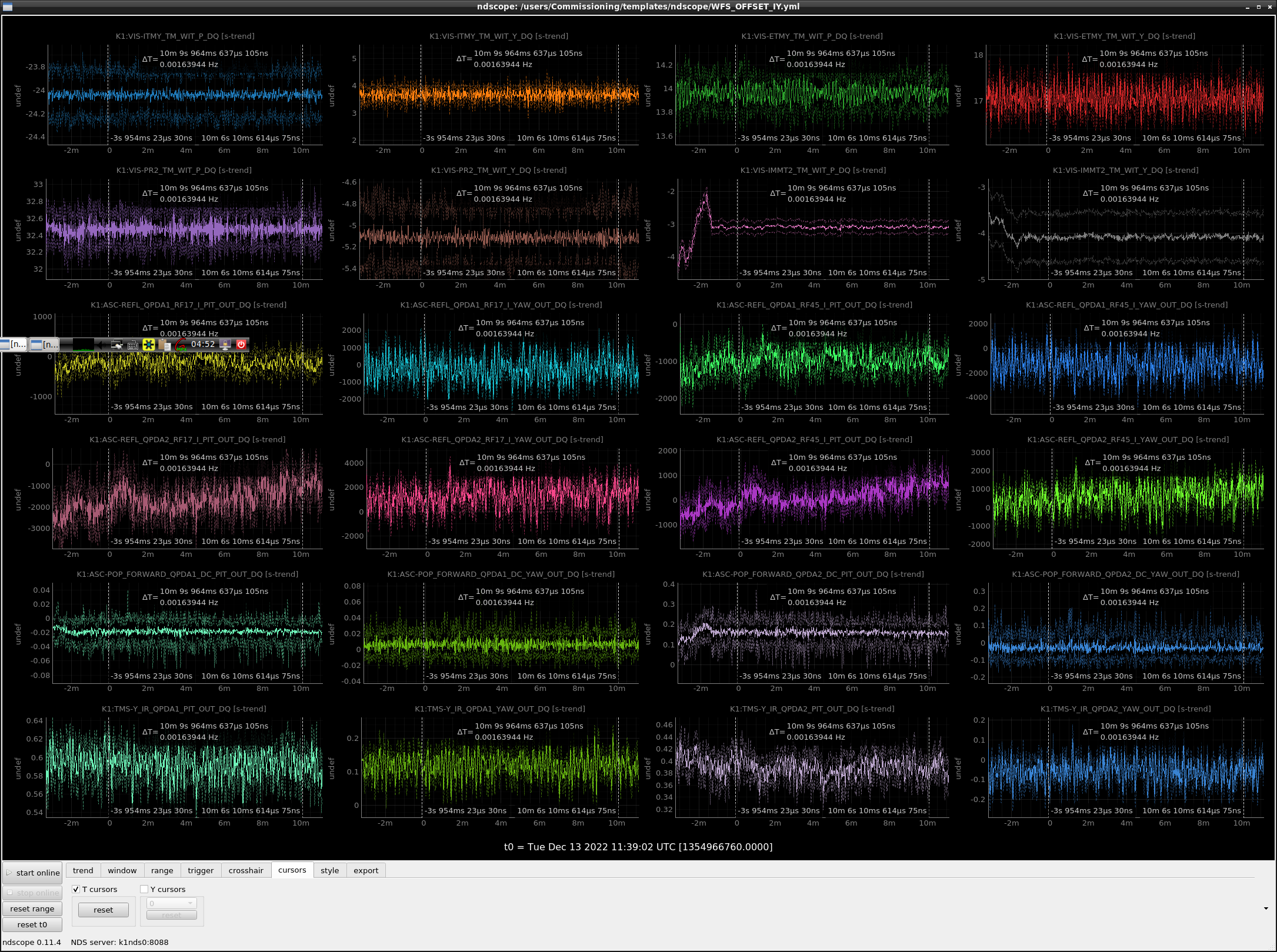
- Substituted DC offset for QPD in WFS. (We did not assign it for every measurement. We post the current offset.)
Process
- First of all, We measured IYEY's sensing matrix.
(Sensing matrix data:/users/Commissioning/data/ASC/2022/REFL_WFS/Yarm/Sensmat/221207/TF_ASC_Yarm_REFLWFS_OPLEV_{ITMY,ETMY}_{P,Y}.xml) - We set matrix to make IY and EY sensor.
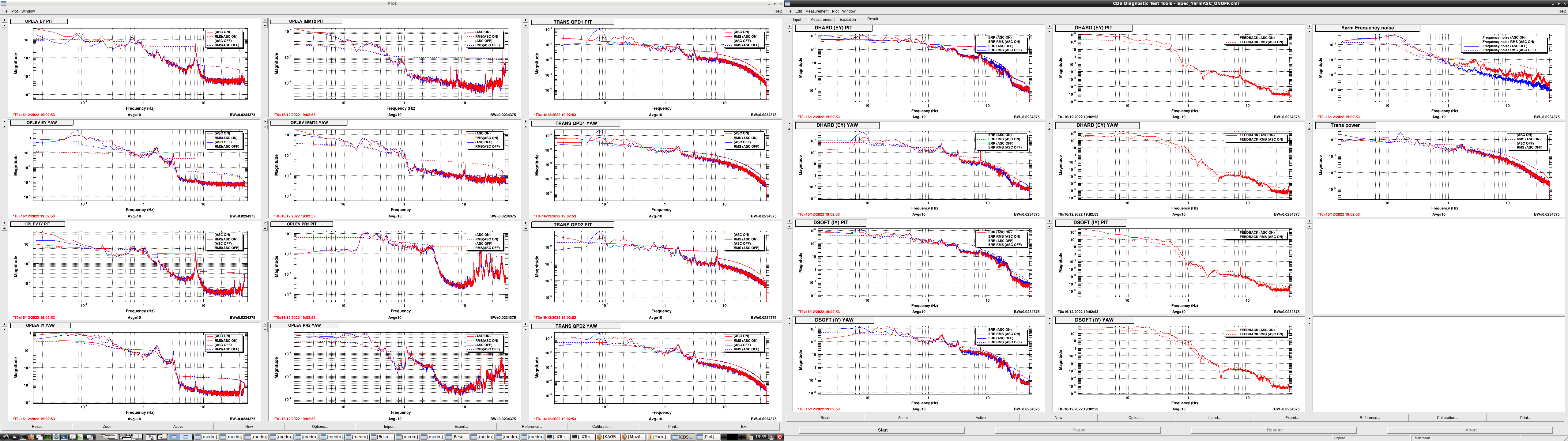
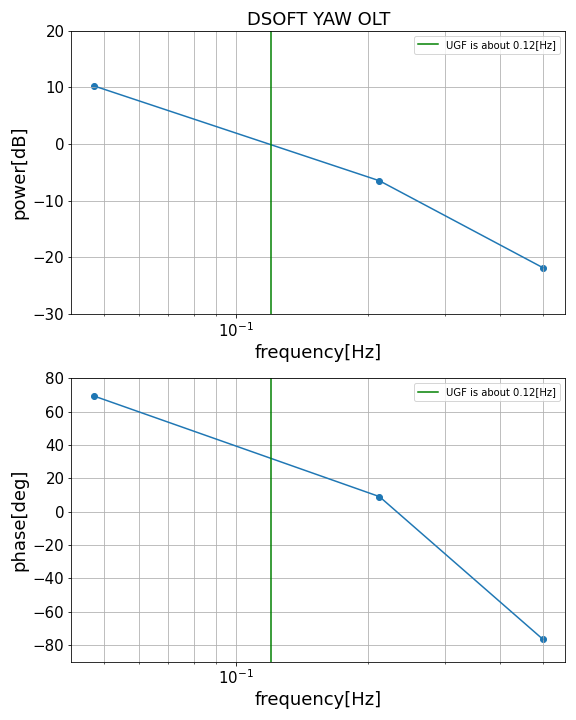
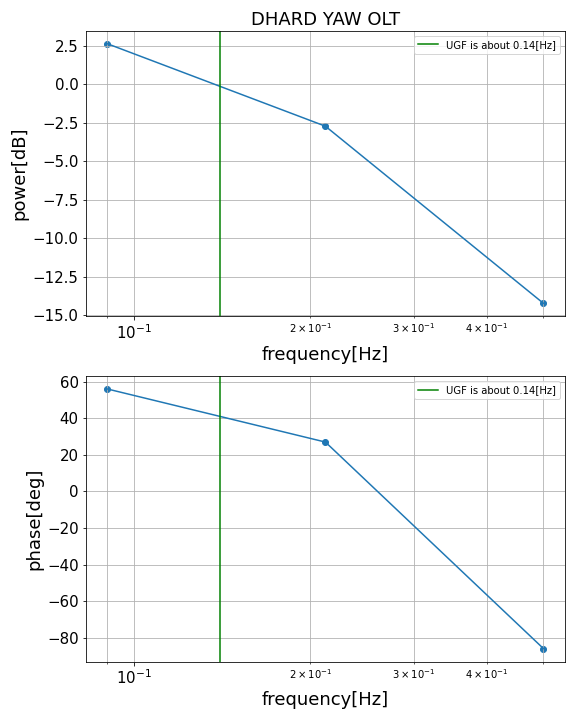
(Script: Sensingmatrix_IYEY.txt) - We measured IY and EY plant and make filters that UGF is 0.1Hz.
(PLANT data : /users/Commissioning/data/ASC/2022/REFL_WFS/Yarm/PLANT/221210/PLANT_ETMY_DHARD_PIT.xml, PLANT_ETMY_DHARD_YAW{,_2,_3}.xml, PLANT_ITMY_DSOFT_{PIT,YAW}{,_2}.xml)
DHARD--> ETMY(Test Mass)
CHARD--> ITMY (Test Mass) - We turned on Yarm ASC--->> We could close Yarm ASC.
What we noticed
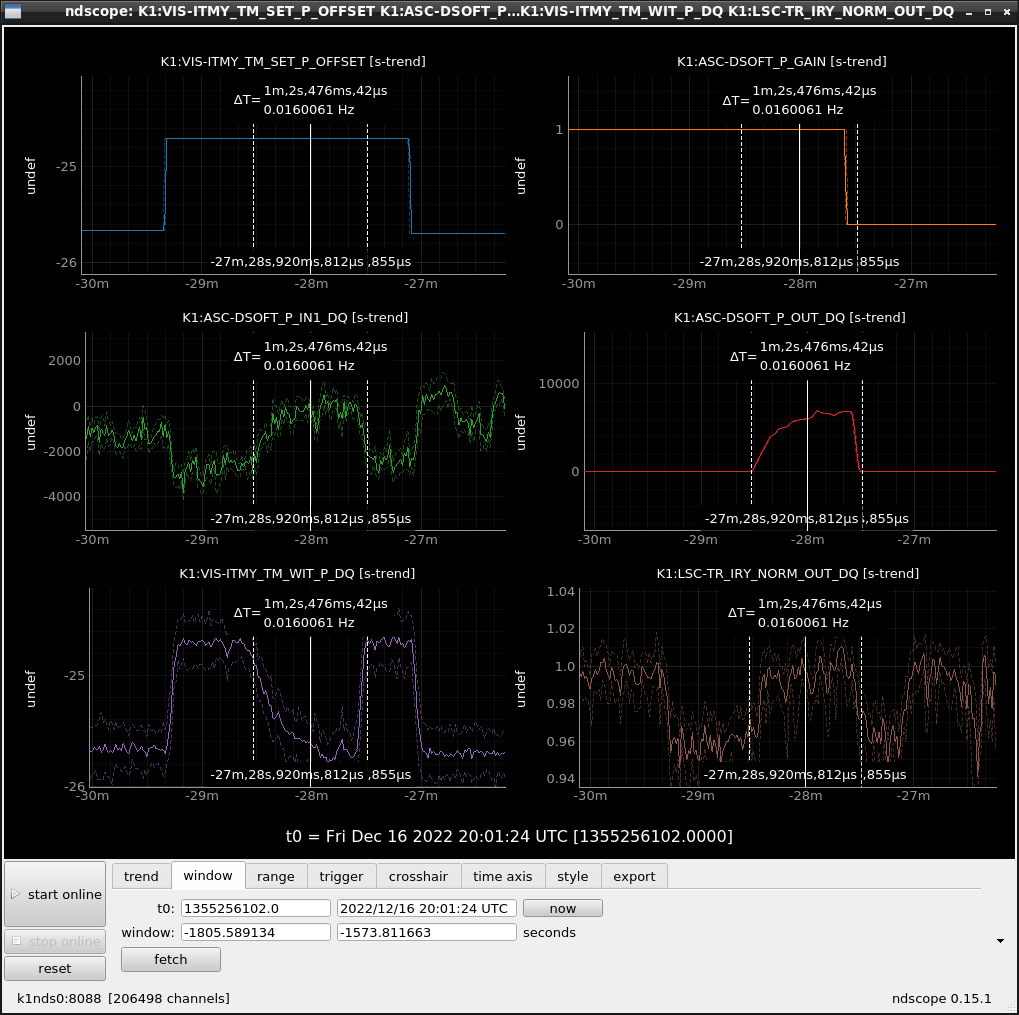
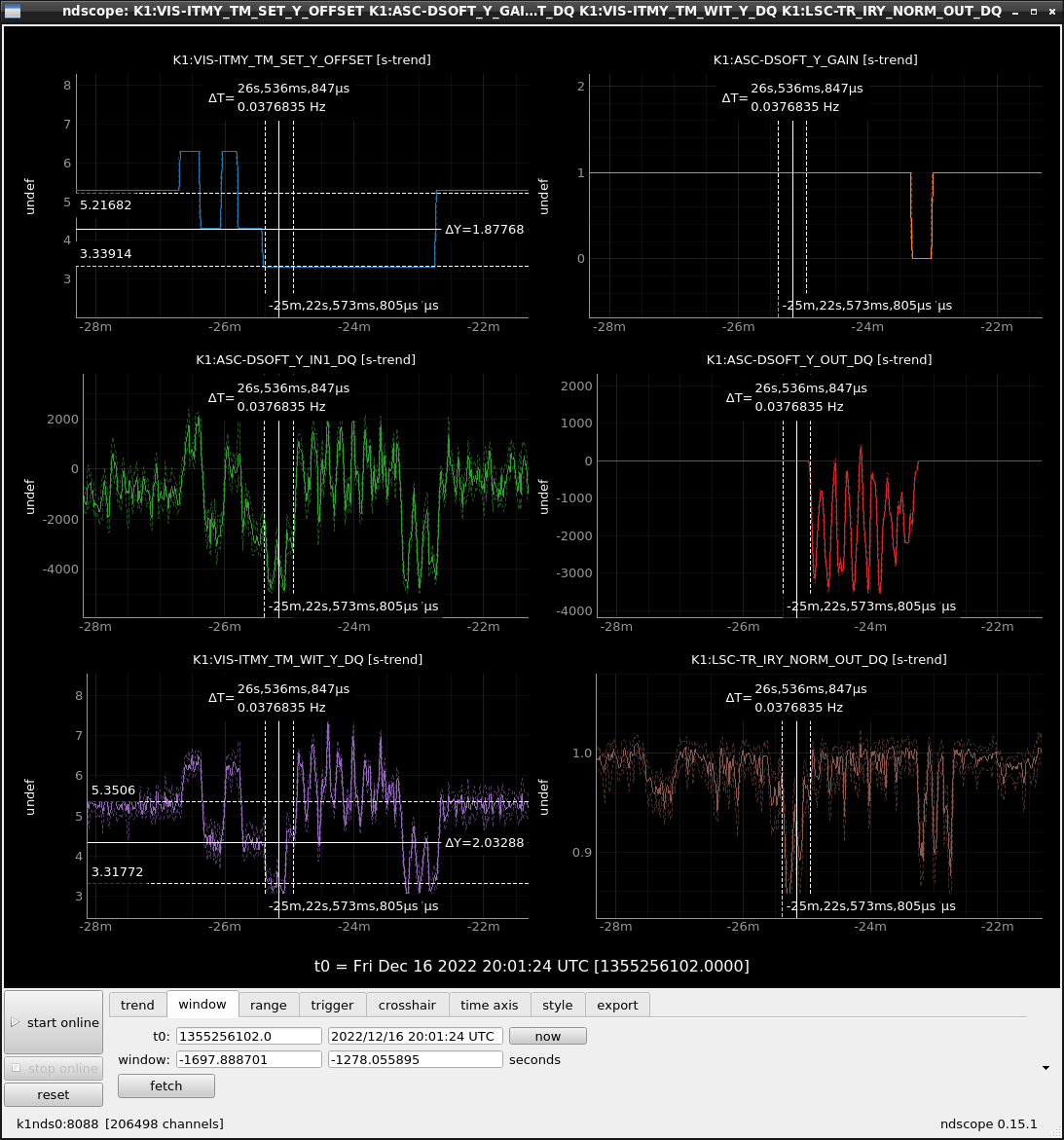
- We set offset to high and error singal is gone to low.(I will repost picutures.)
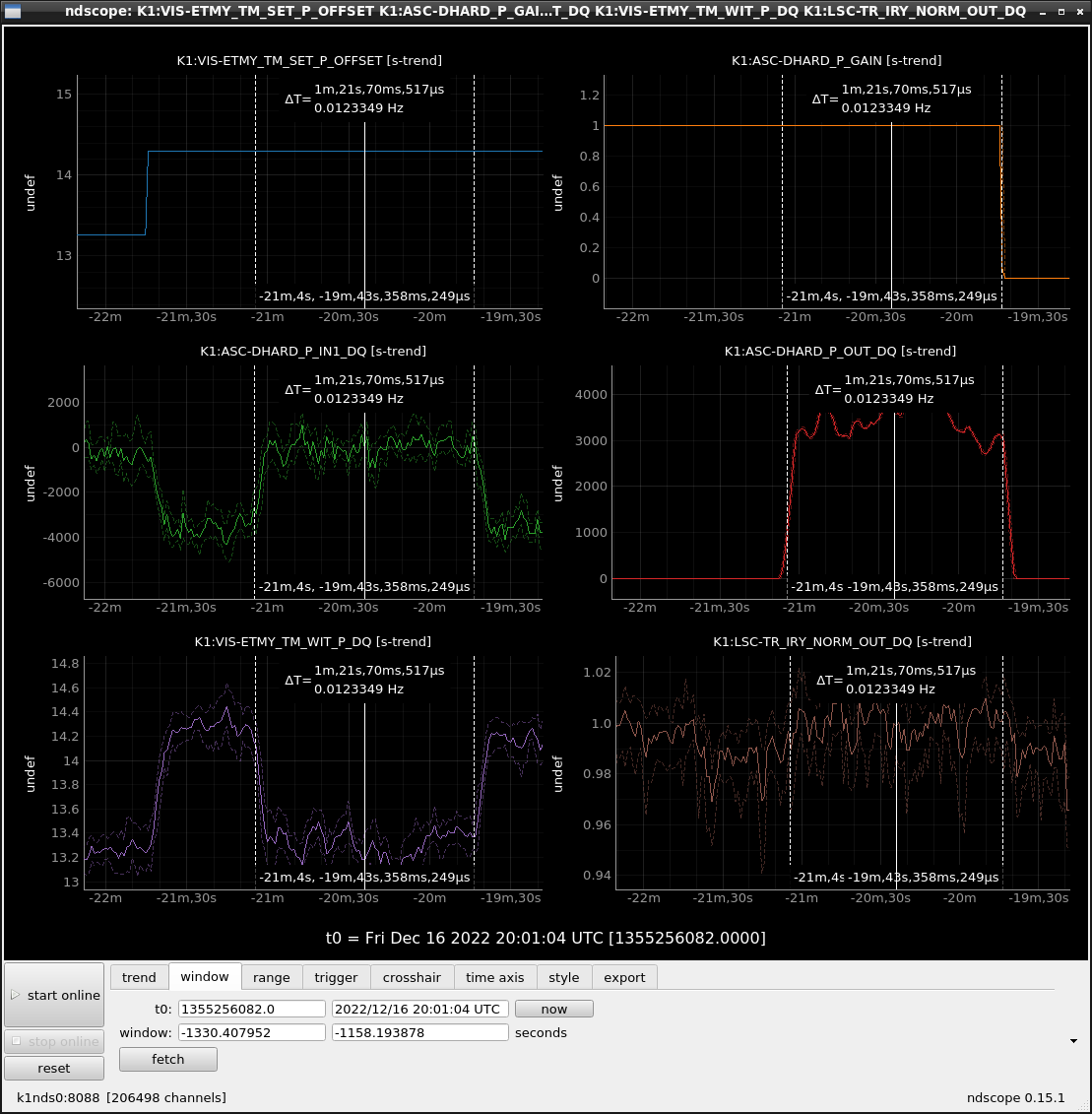
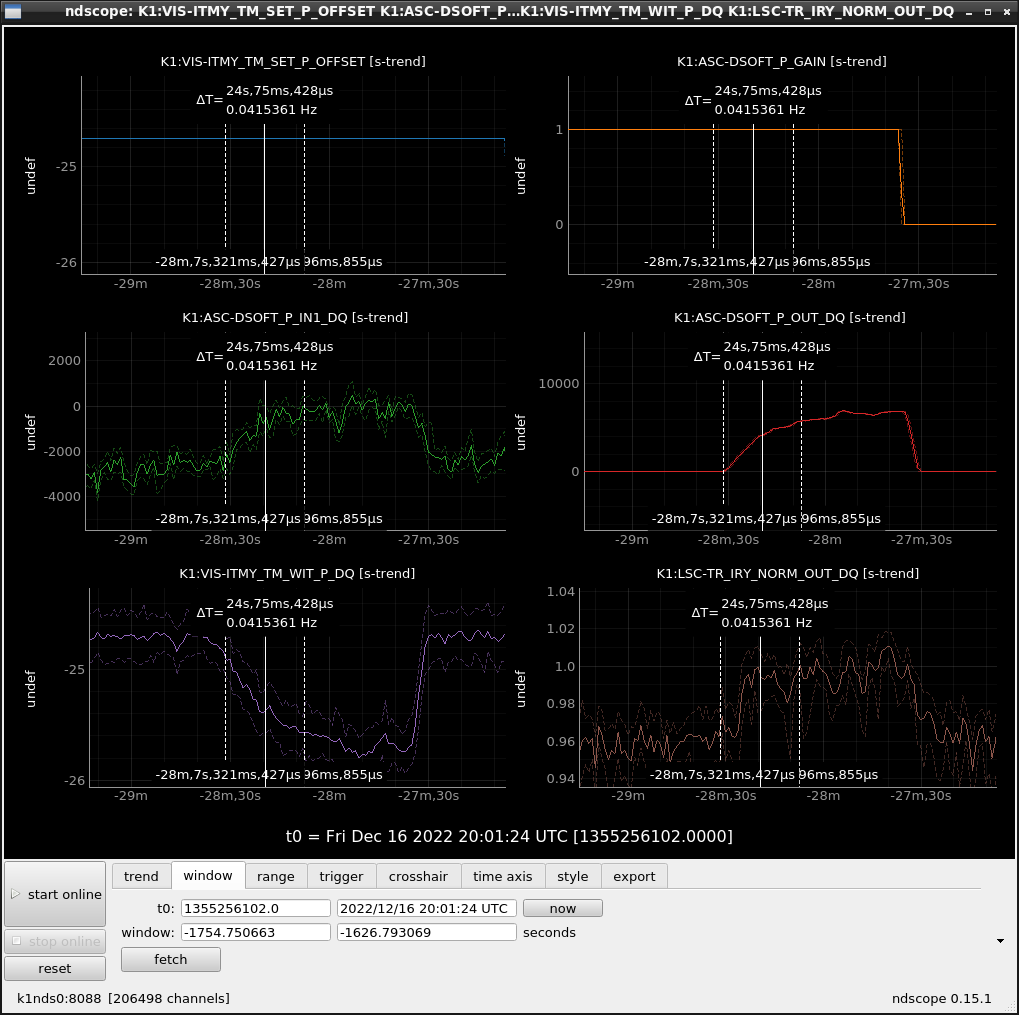
- DHARD and DSOFT PIT is very slow to feedback IY and EY.
So we tried to adjust gain (1->10) and feedback control of them is become a little fast.
It is possible that the PLANT was not measured properly. - But offset is 4000count is high that angle can be tited ±1urad, filter is facturated.
The range should be slightly larger because the ASC has to compensate.
For example, we should consider feeding back to MI instead of TM to increase the range.
(I'm sorry. These is no picture. We will take the screenshot.)
About DC offset of WFSs
(Recorded timeline of work : klog_221214.pdf)
- After turning off ADS, we observed for 10 minutes and had the impression that the DC offset was not moving.
However, we cannot consider how much the DC offset moves because we have not been able to calculate how much it affects the control. - Originally, it is assumed that the incident axis and cavity axis are aligned by ADS, so we had to cancel the DC offset appearing in the WFS.
But after 10 minutes, RF17 of REFLWFS2 which is used for control was close to 0 due to drift, so we started the ASC work without changing the RF17. - With all loops on, the DCoffset of RF17 for QPD1 and 2, which are used for control, has been zero.
The figure shows the offset value of the QPDs when the proper gain is put in all controls. (It shows how we checked by changing the gains and offsets sometimes.) - The DC offset needs to be looked into.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}