I did preparation to inter-calibrate the seismometer on the 2nd floor (IXV) with the LVDTs and geophones. The data will be acquired on a day with bad weather.
Concept
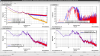
As vector quantities, the readout from the three types of devices are related according to this equation: GEO = SEIS + LVDT, where
- GEO measures the displacement of the IP with respect to an inertial reference frame,
- SEIS measures the displacement of the ground with respect to the inertial reference frame and
- LVDT measures the displacement of the IP with respect to the ground.
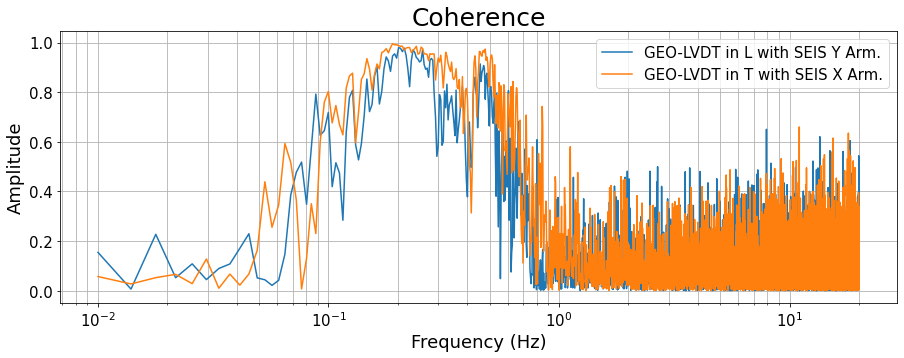
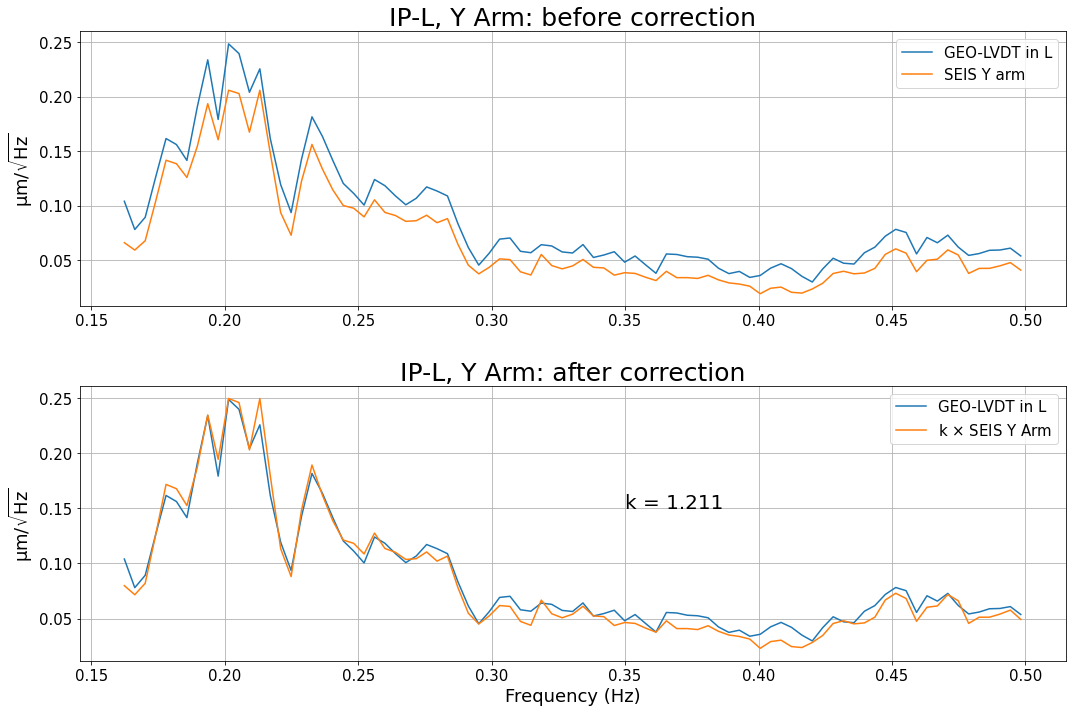
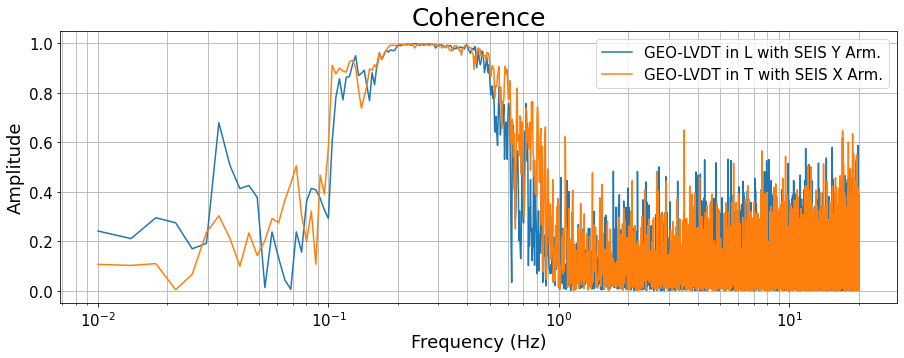
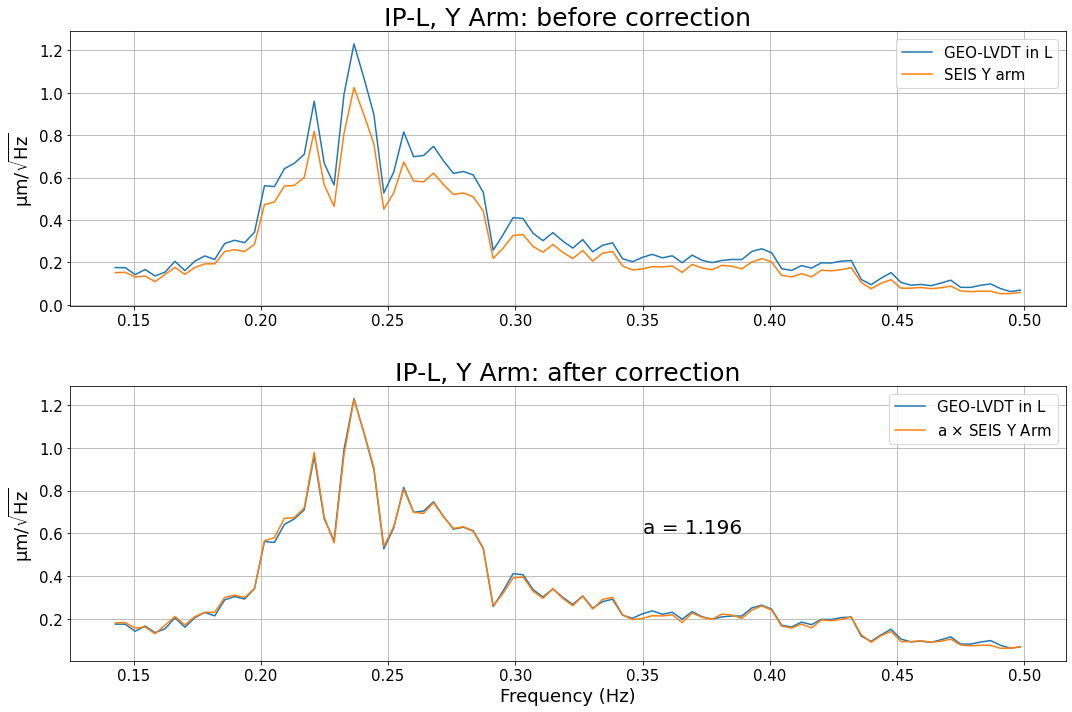
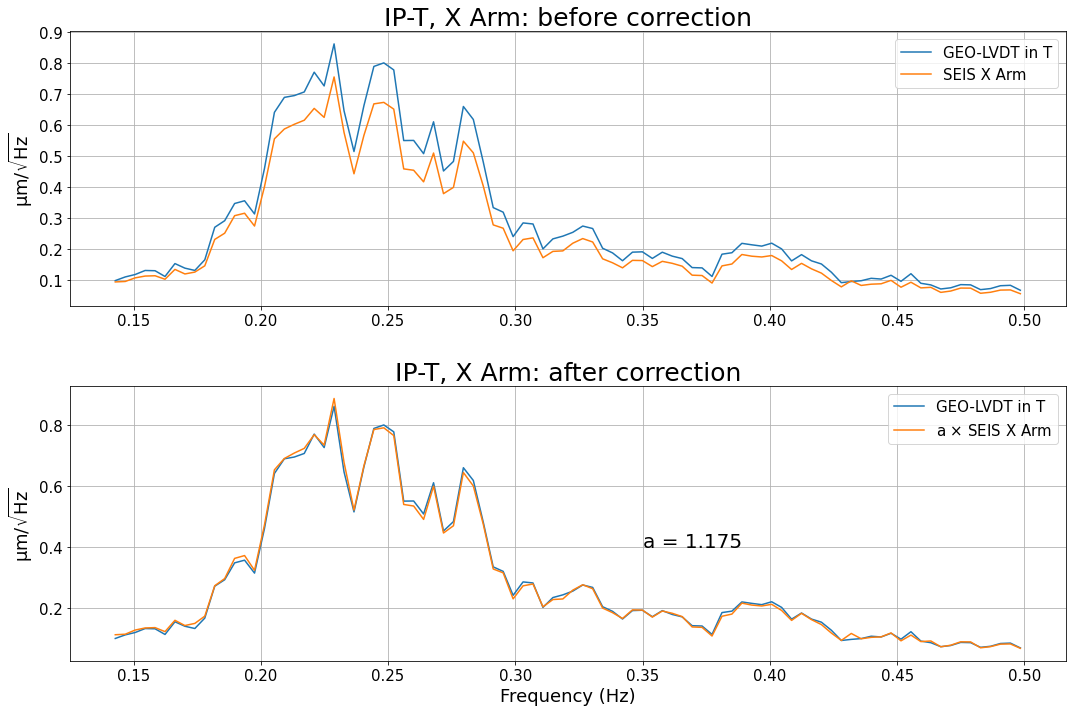
Inter-calibration is finding a constant number a such that a * SEIS = GEO - LVDT, where the geophones and the LVDTs have been inter-calibrated already.
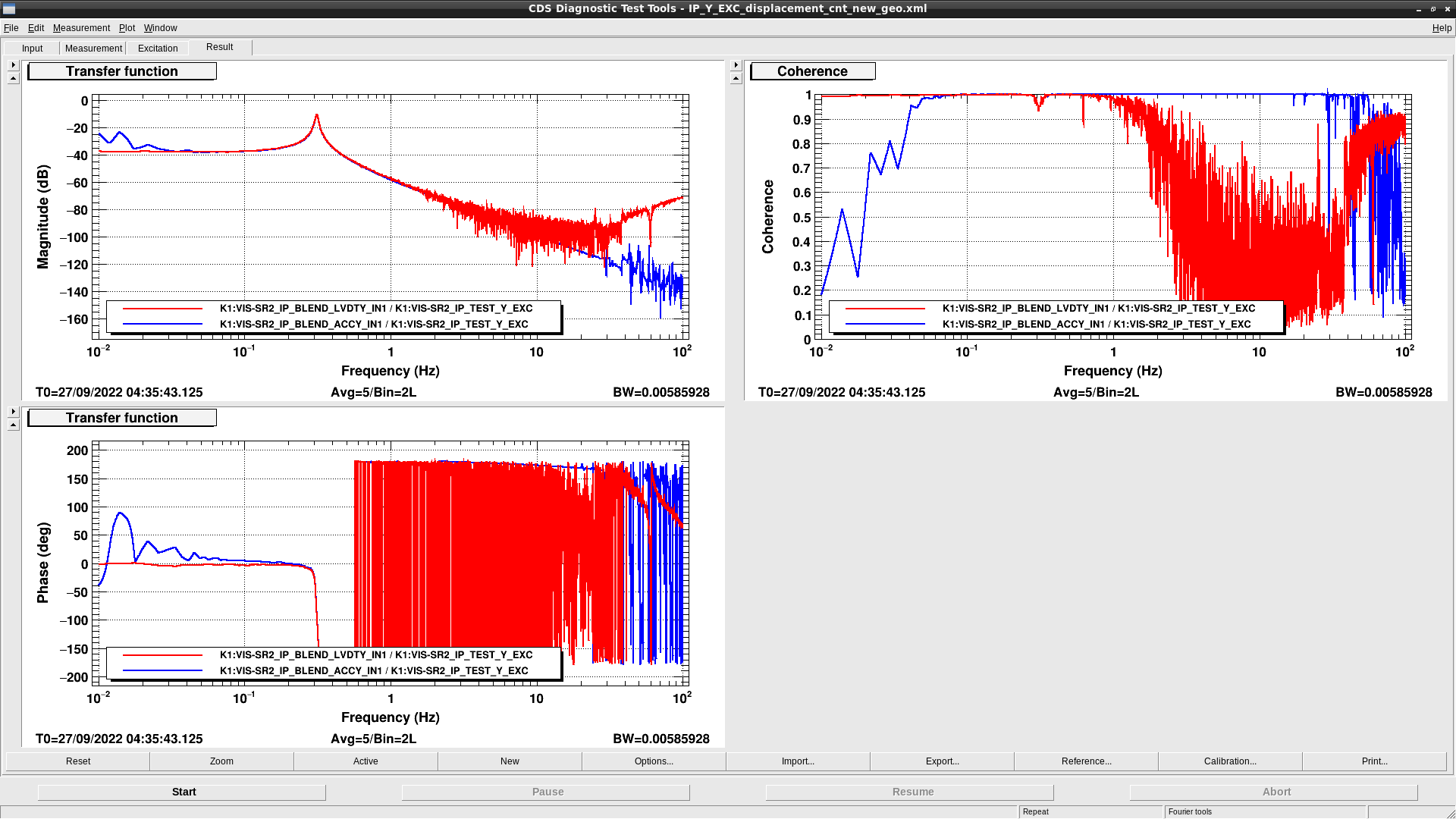
In practice, the subtraction of the time series can be done using the filter banks that are usually used for blending the LVDT and the geophones (alternative approches are explained in klog 20410).
Implementation
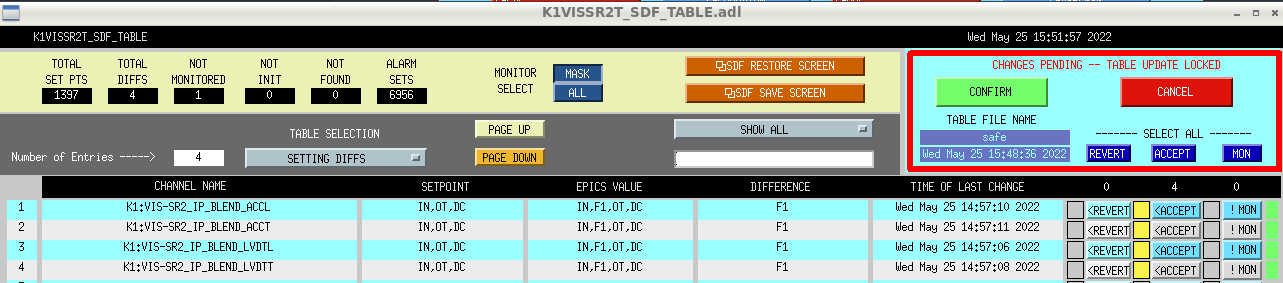
- I added a gain of -1 to each of the filter banks SR2_IP_BLEND_{LVDTL,LVDTT}.
- I added a gain of +1 to ech of the filter banks SR2_IP_BLEND_{ACCL,ACCT}.
- Then, the subtraction GEO - LVDT in L and T are in the channels K1:VIS-SR2_IP_IDAMP_{L,T}_IN1, provided that the setpoints are set to zero (although this might not matter because diaggui subtracts the DC offset).
This implmentation shoud be used in TWR_FLOAT state, where the setpoint offsets can be turned off safely while keeping the suspension in the nominal position. I turned the subtraction filters on and updated the SDF in SAFE state. I'll get rid of these filters after I finish the measurements.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}