This entry reports the results of the recalibration of the geophones.
Recalibration was necessary because a bump appeared in the transfer functions around 1 Hz. See the original report in klog 20534.
It's better to describe what I did in a document and upload it to JGWDoc, for this klog entry I just give a cursory description:
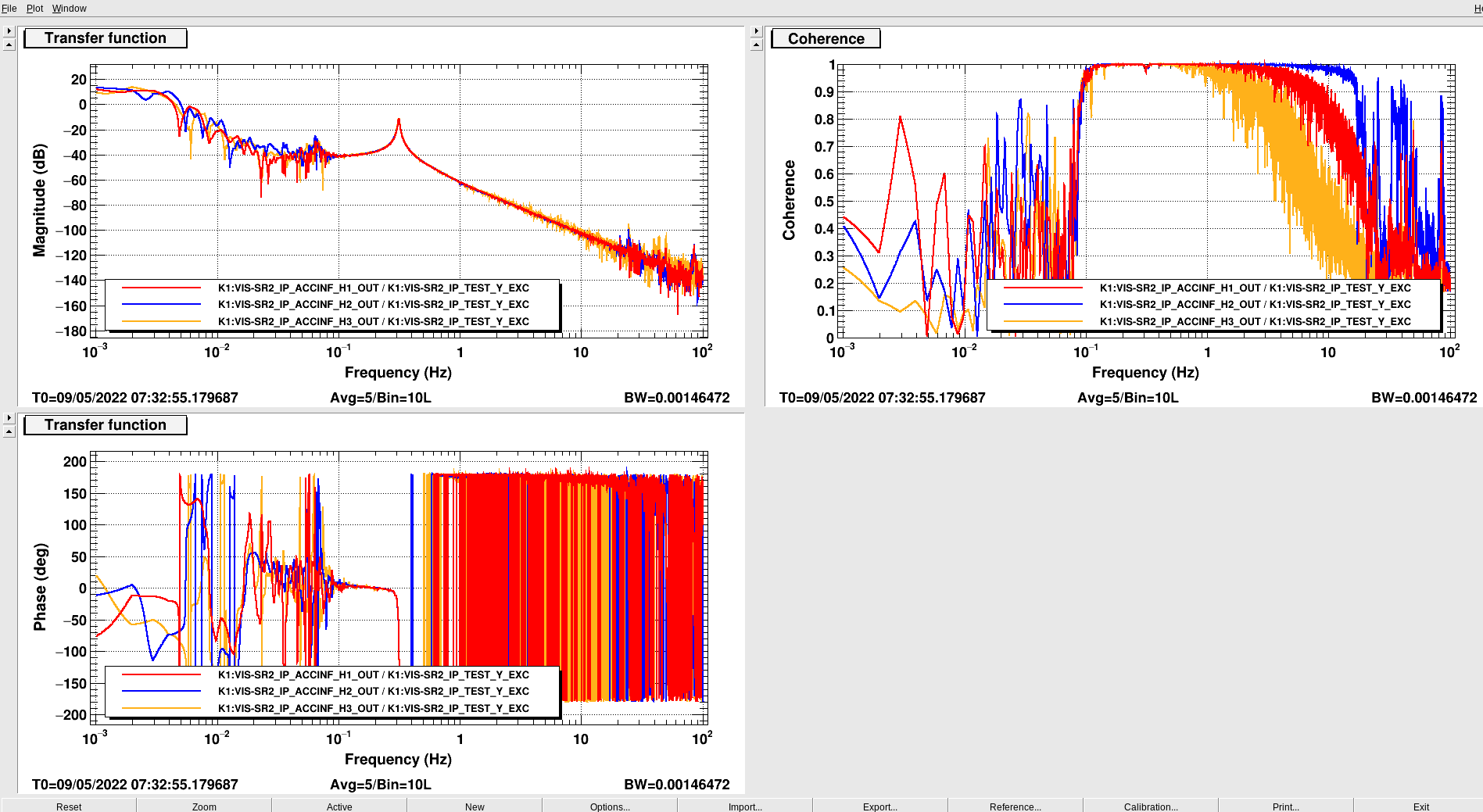
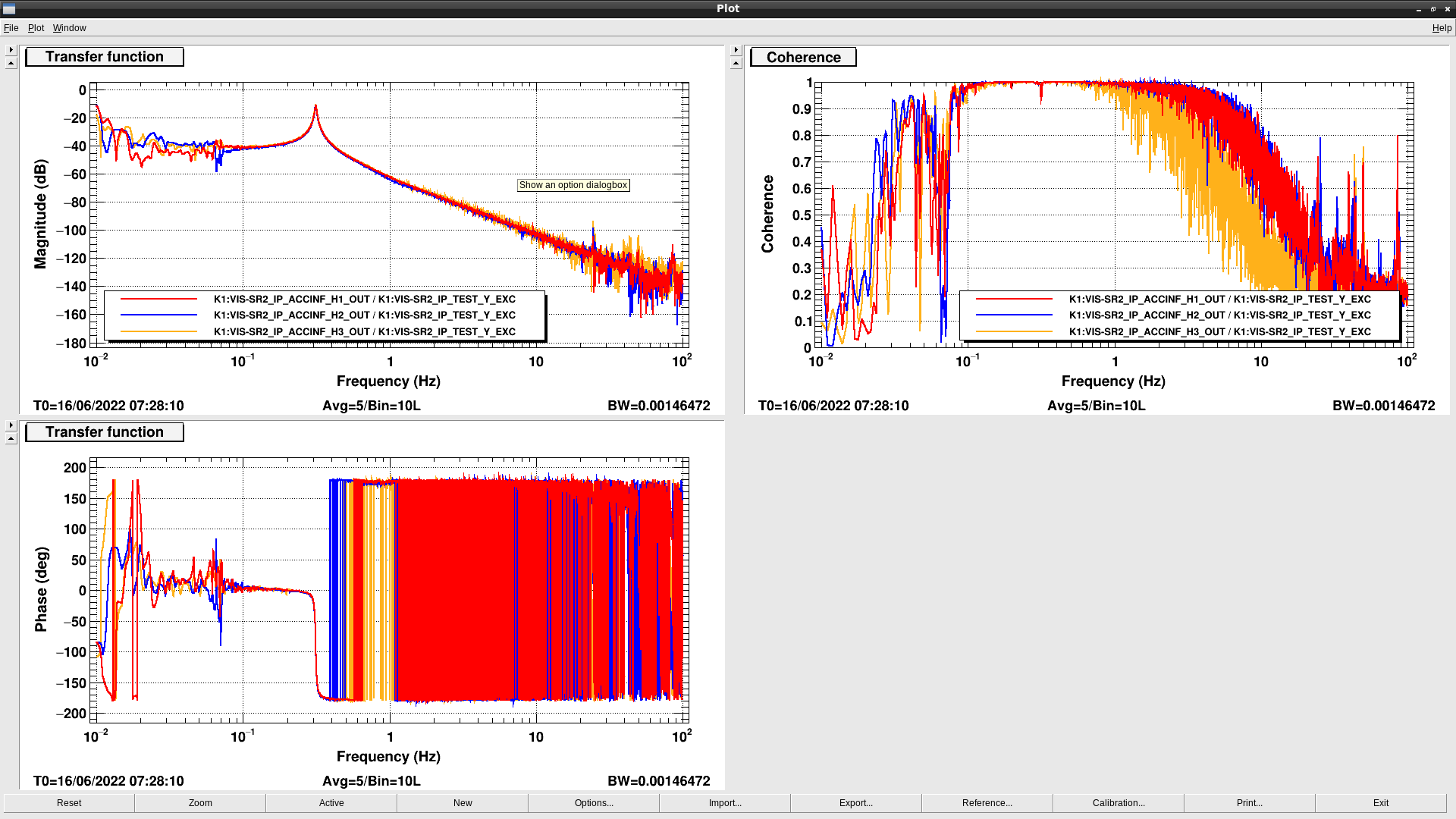
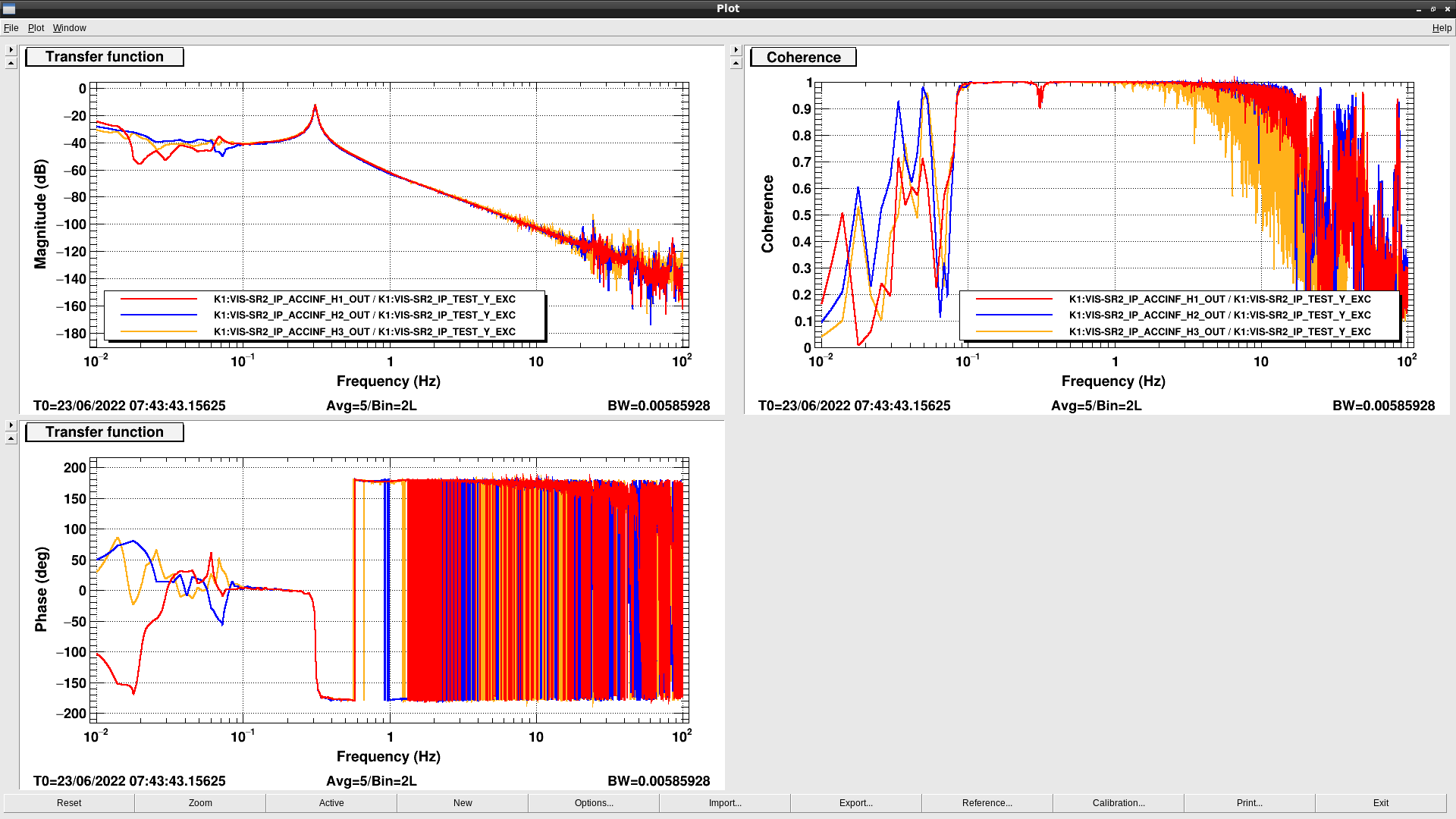
- I measured the TFs from yaw actuation to two different sets of outputs:
- Set 1: raw output of the individual geophones, in units of cnt/cnt.
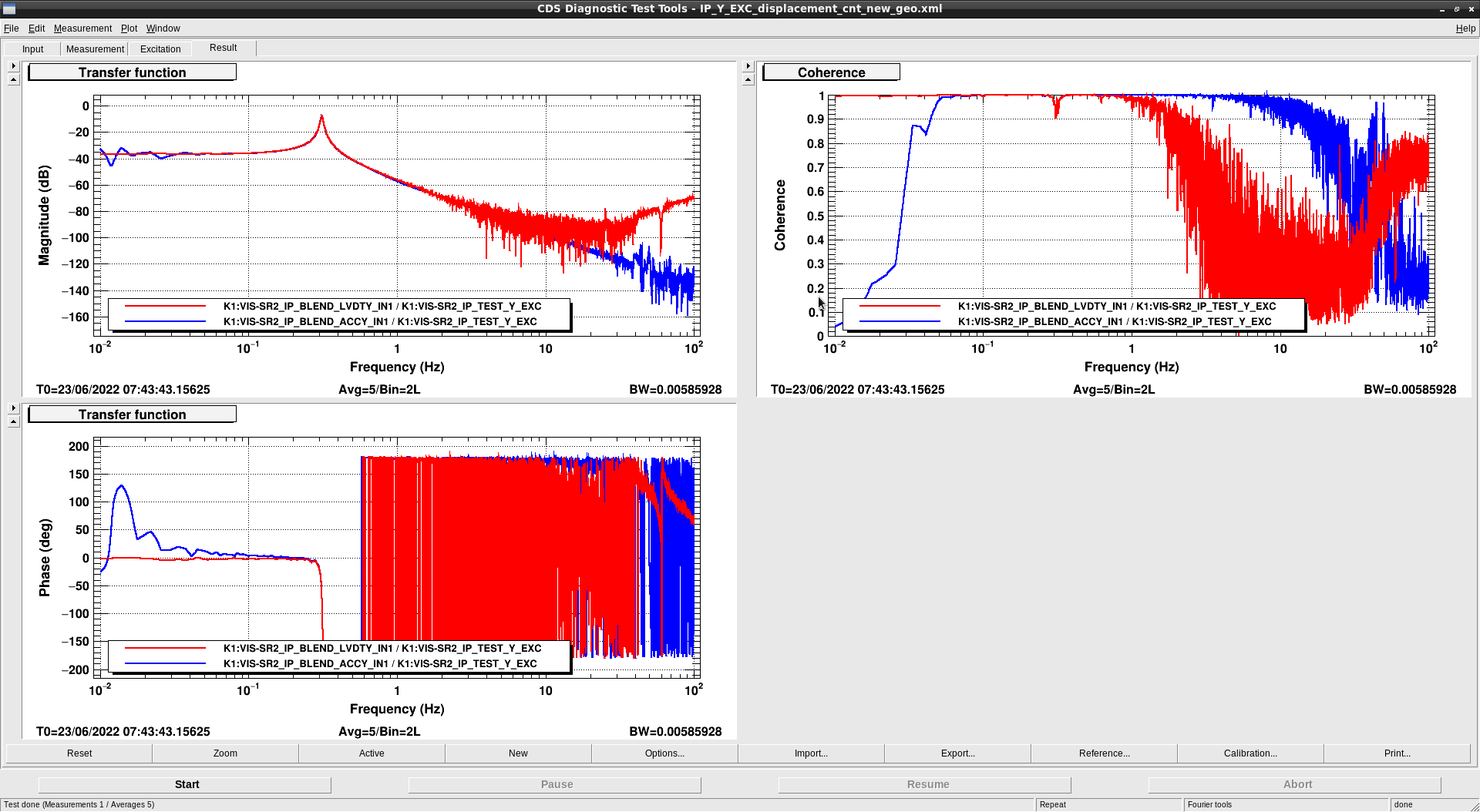
- Set 2: displacement output of the individual geophones, using their calibration transfer functions that produce the bumps, in units of um/cnt.
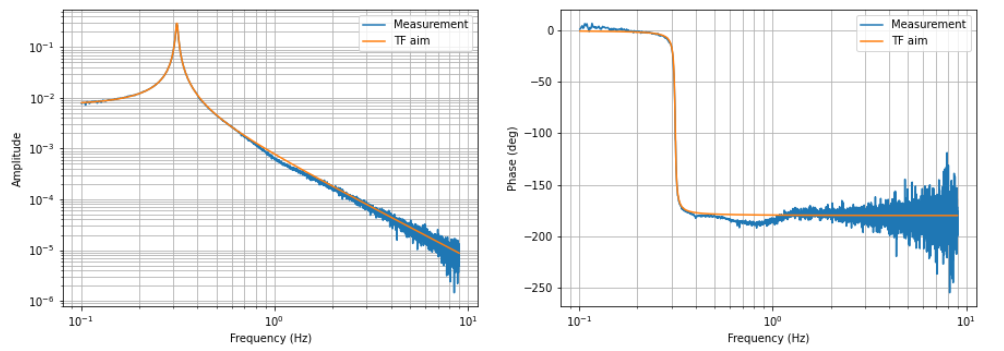
- I fitted each of these TFs in Set 2 with a mathematical model that does not allow the bump to appear, and fits well the resonance frequency and DC amplitude. For the fit, the values were weighed with a factor 1/f in order to favor lower frequencies where the resonance is.
- Then I defined a function containing the geophone parameters to determine (Ge , f0 and eta): integrator(s) * m2um * ( 1 / H_geo ) * hp(s) * ( 1 / preamp ) * cnt2V * tf_raw
- Integrator: conversion from velocity to displacement,
- m2um: conversion from metres to micrometres.
- H_geo( Ge, f0 , eta ) = Ge * s**2 / (omega0**2 + 2 * omega0 * eta * s + s**2 )
- s = 1j *2 * pi * f
- omega0 = 2 * pi * f0
- hp: high-pass filter with four poles located at 3 mHz.
- preamp = 940, this factor compensates the preamplifier gain.
- cnt2V = 2 * 20 / 2**16, ADC conversion factor in units of V/cnt.
- tf_raw: raw transfer function from Set 1.
- Then I fitted the function defined in step 3 to data generated with the function calculated in step 2.
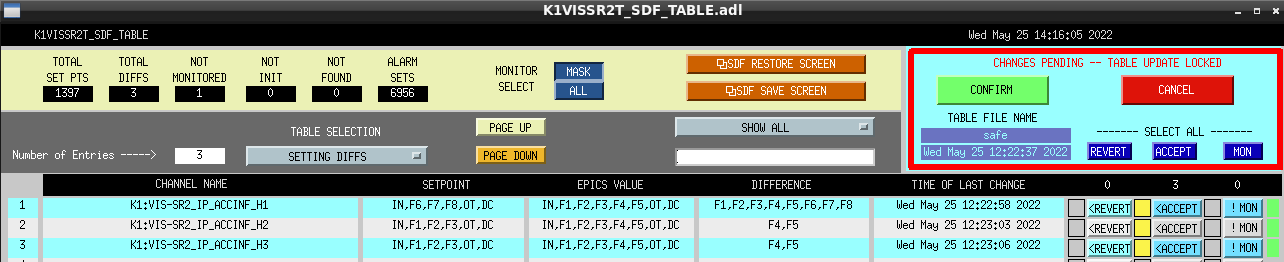
- With Foton, I put all these filters in the filter banks and measured again TFs.
In the table, the original values measured by Fujii-kun (entry 7059) and the new ones are shown.
| Geophone name in SR2 | Ge [V/(m/s)] | f0 [Hz] | Eta | Ge [V/(m/s)] | f0 [Hz] | Eta |
| | Values from klog 7059 | New values |
| Geo 4 (H1) | 264.86 | 1.094 | 0.6022 | 265.114 | 1.079 | 0.2990 |
| Geo 5 (H2) | 267.535 | 1.193 | 0.5559 | 260.6117 | 1.125 | 0.2881 |
| Geo 6 (H3) | 269.65 | 1.401 | 0.4383 | 248.8686 | 1.204 | 0.2386 |
The observations are:
- All the resonance frequencies f0 decreased, namely, by 15, 68 and 197 mHz for H1, H2 and H3 respectively.
- The damping factors Eta decreased by factors of 0.49, 0.51, 0.54 for H1, H2 and H3 respectively.
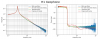
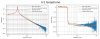
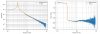
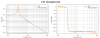
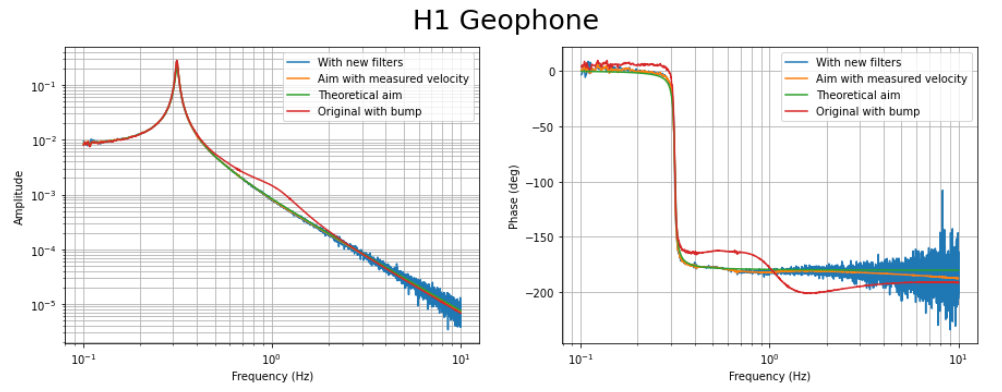
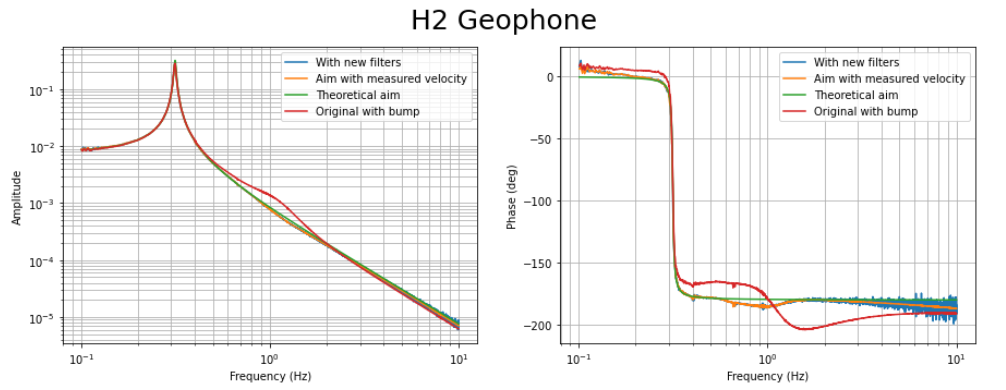
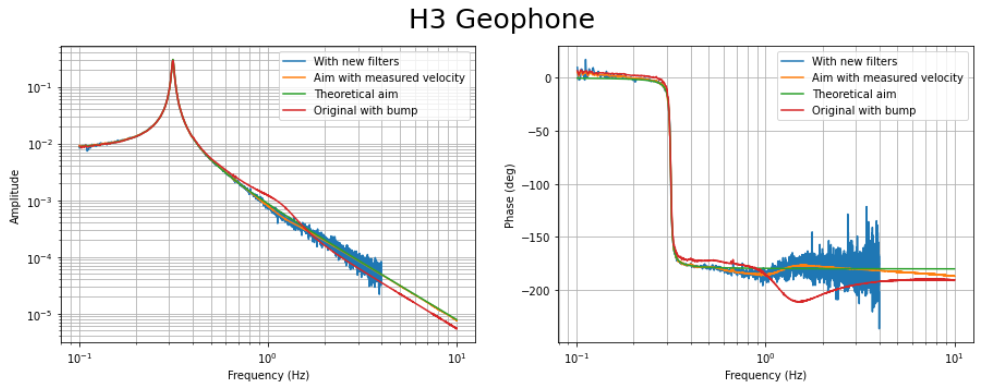
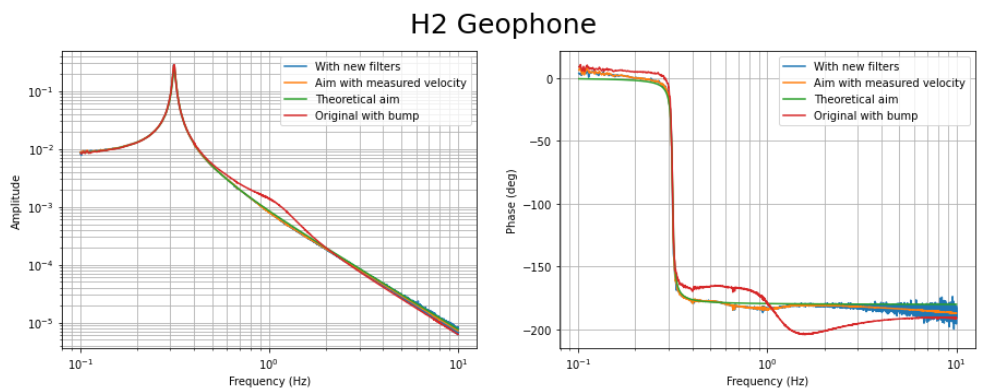
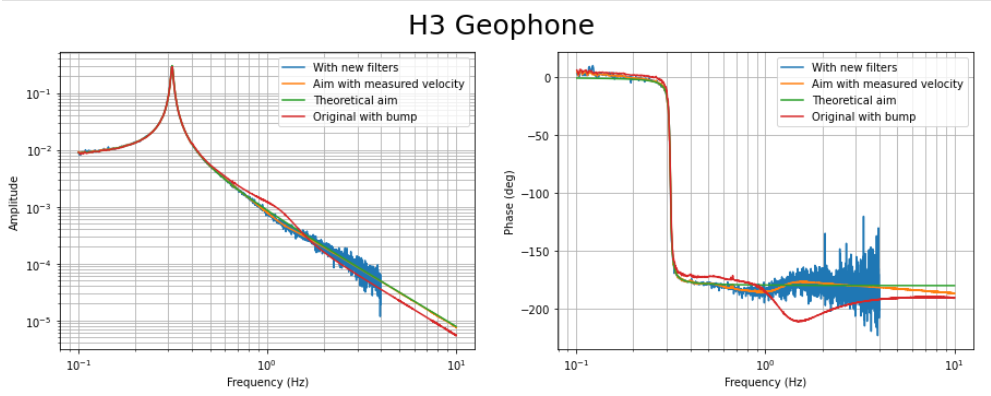
The plots show the following quantities:
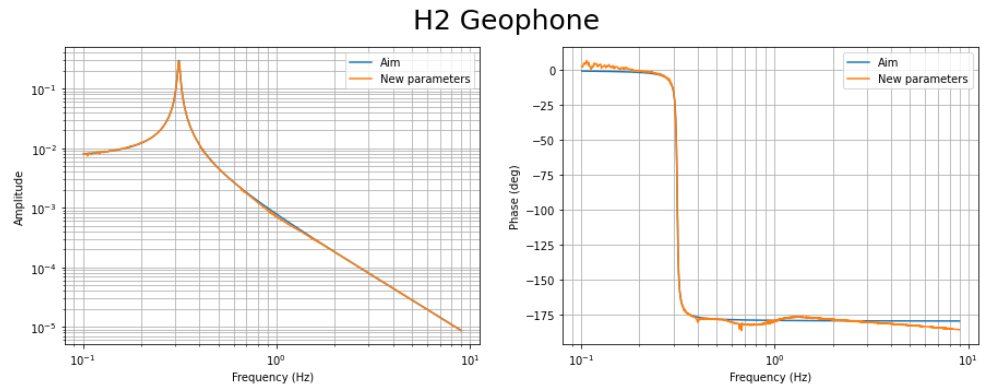
- With new filters: TF measured with corrected geophone parameters (step 5 above).
- Aimed with measured velocity: TF calculated with the measured raw TF (Set 1 in step 1) and the geophone calibration function with new parameters.
- Theoretical aim: Transfer function calculated in step 2.
- Original with bump: the name is explanatory.
From the plots, it's clear that the results are alright and, therefore, I'll continue with the following step, which is inter-calibration between geophones and LVDTs. However, it seems the results could still be improved.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}