[Ikeda, Hirata-san]
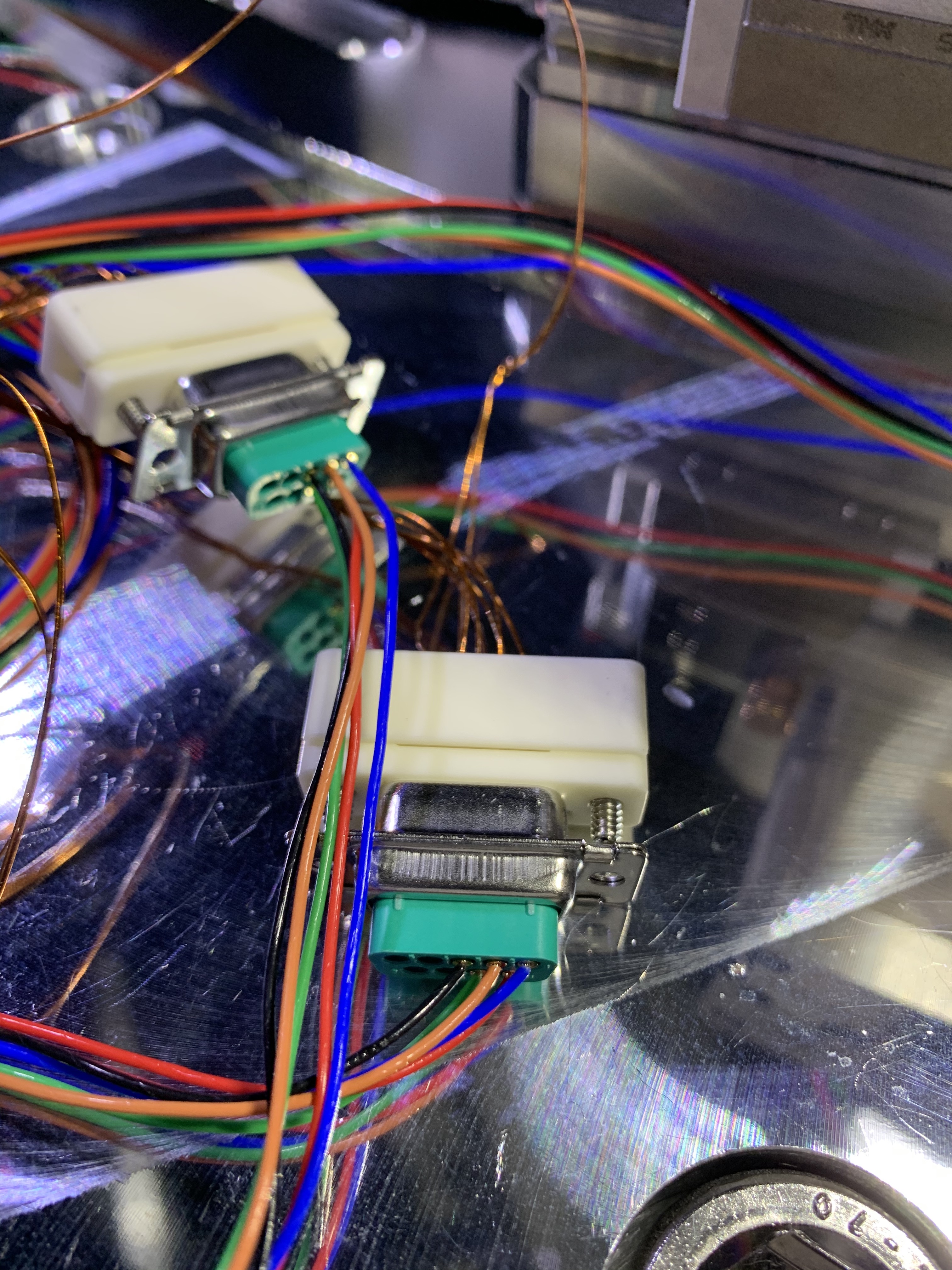
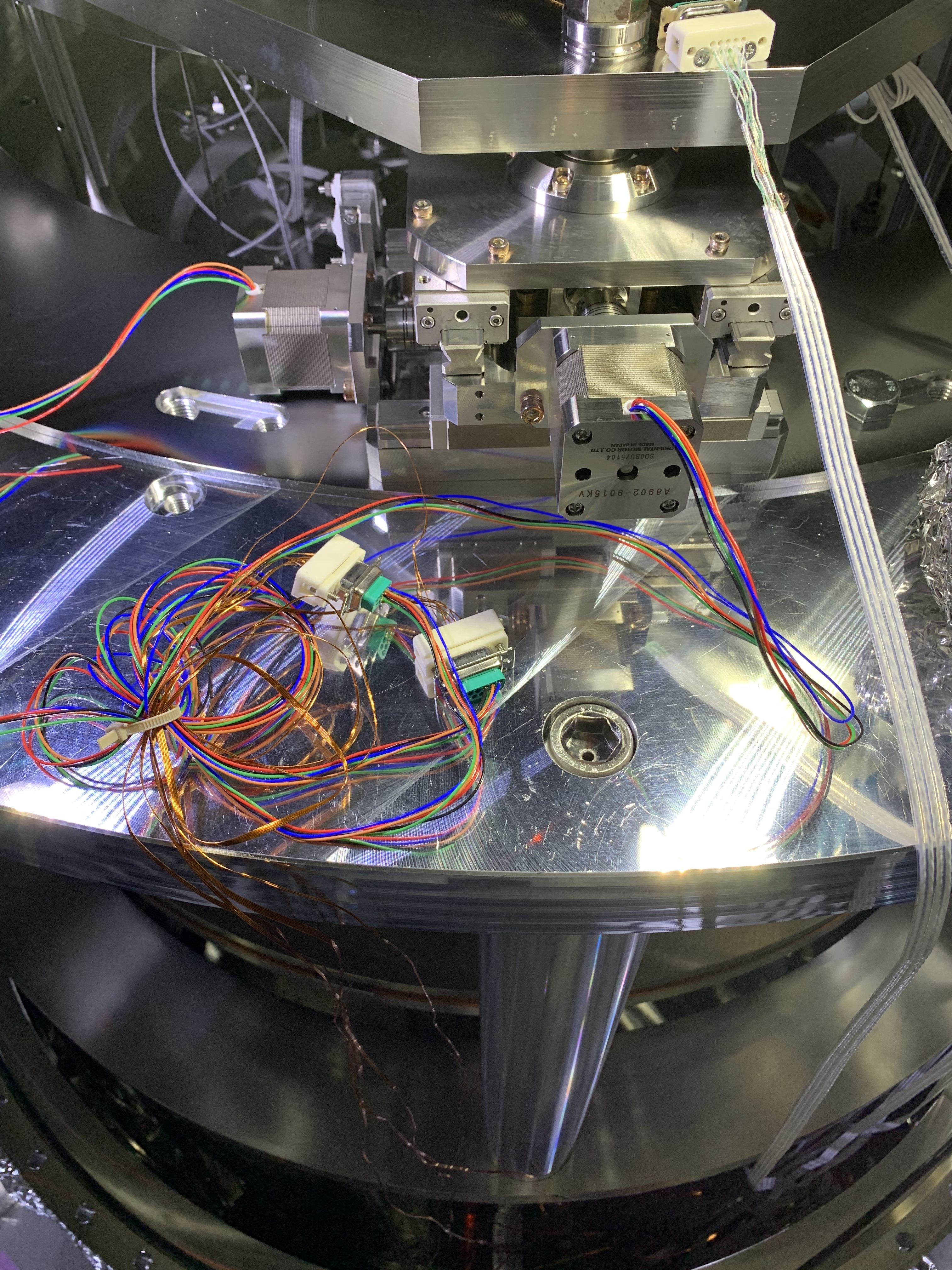
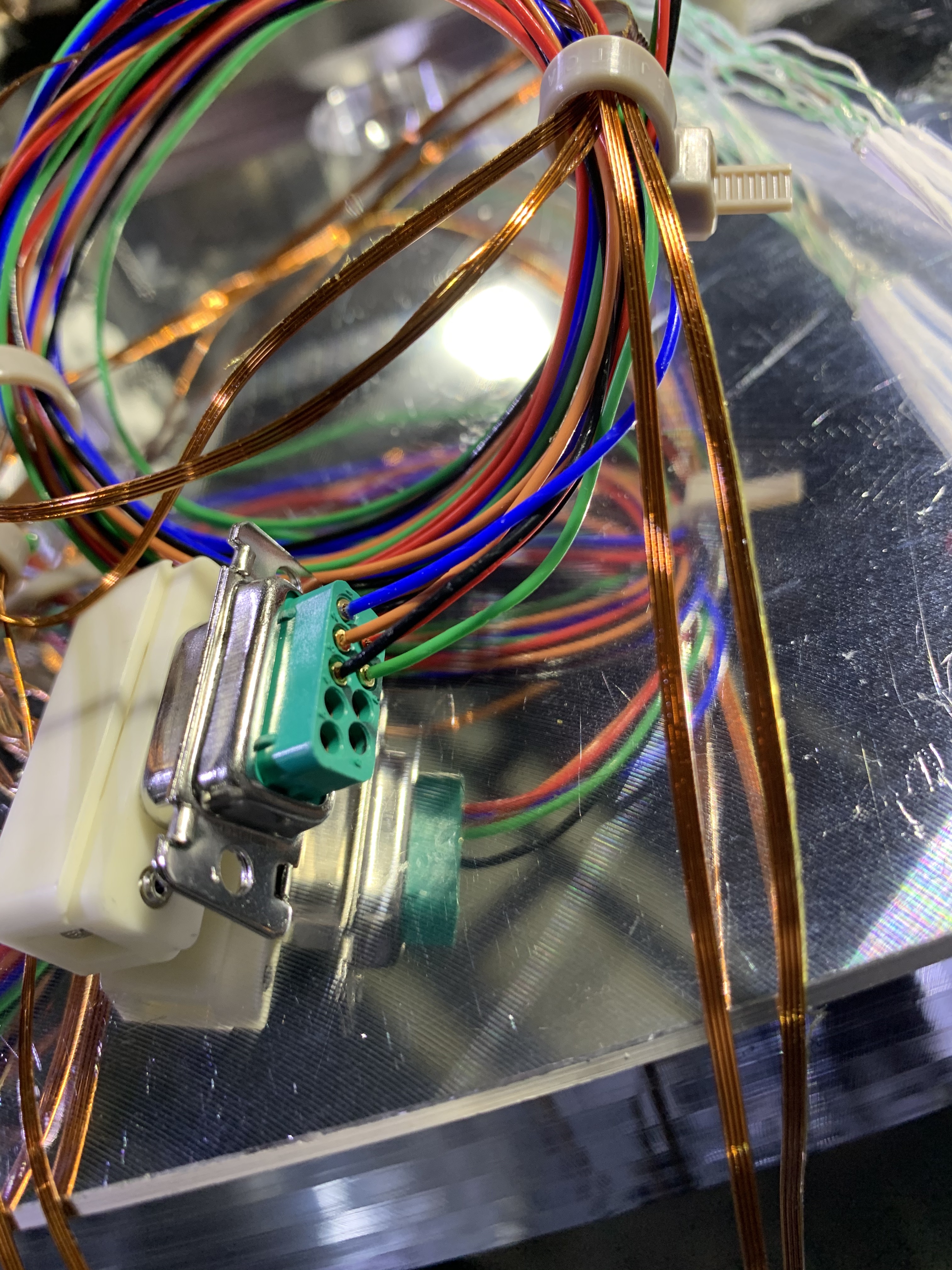
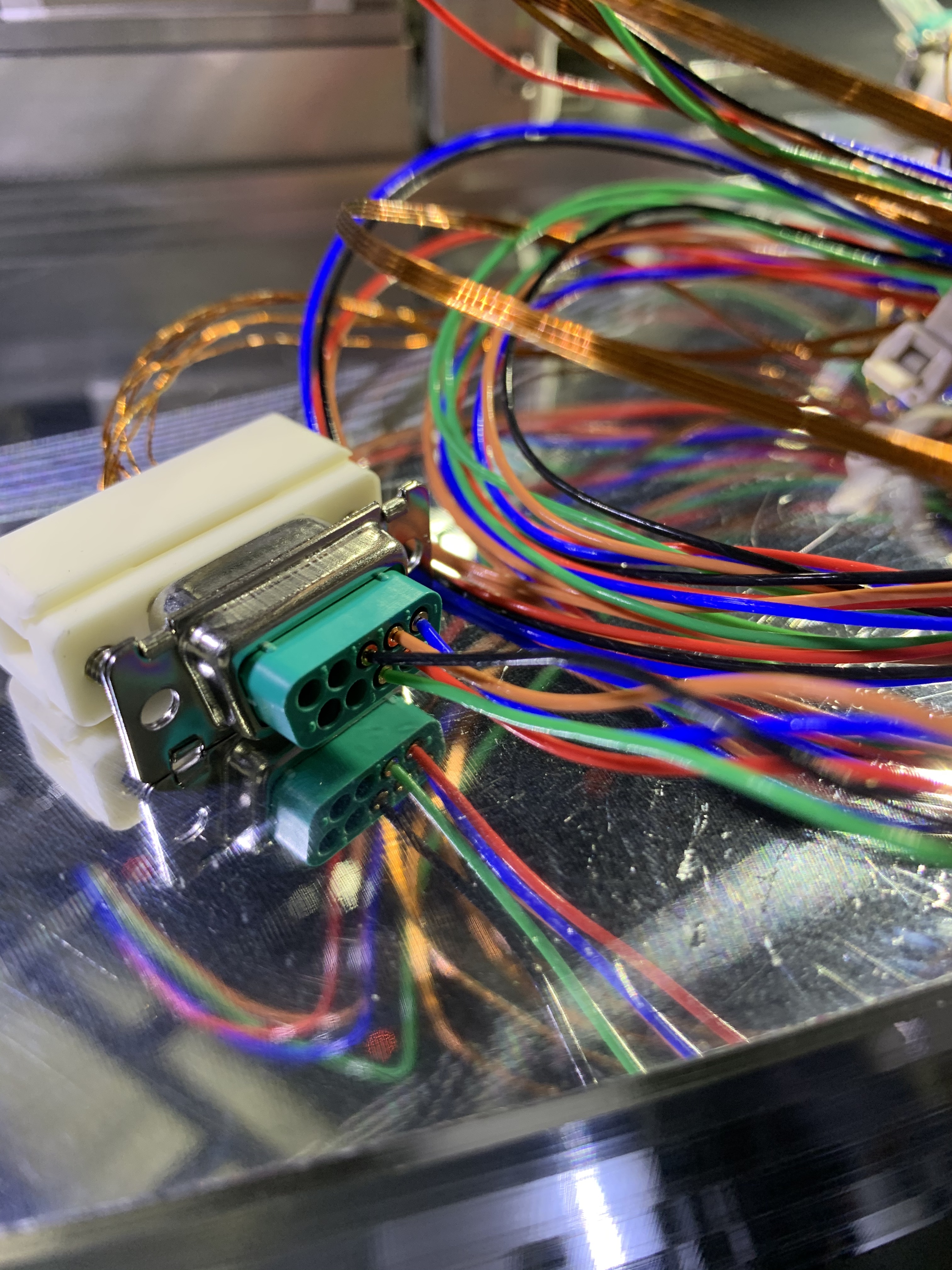
We have changed the pinout from the motor to the D-Sub9pin connector on the PR3 traverser.
We modified it to match the pinout of the PR2 and motor driver.
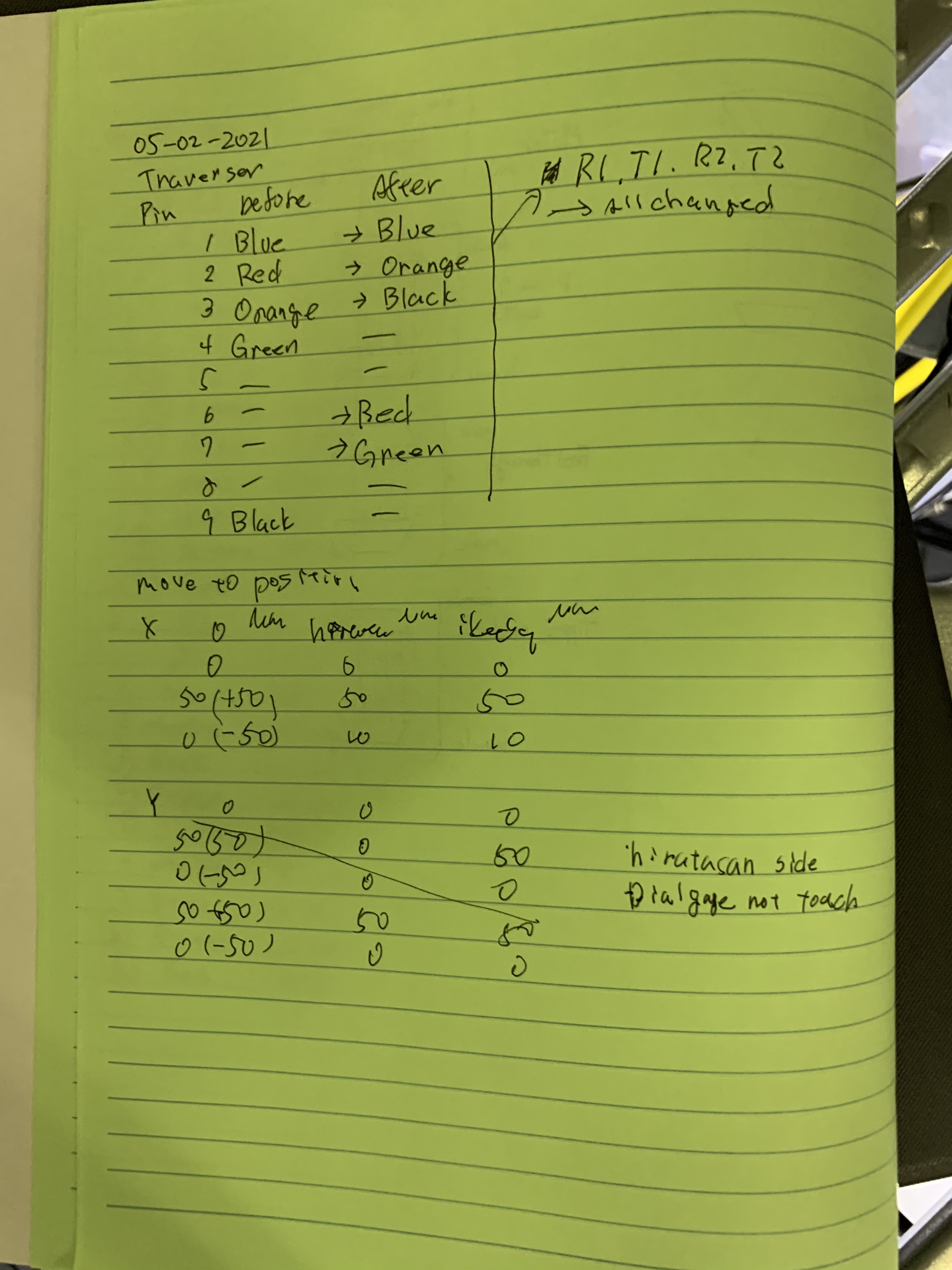
| Pin | Before | After |
|---|---|---|
| 1 | Blue | Blue |
| 2 | Red | Orange |
| 3 | Orange | Black |
| 4 | Green | - |
| 5 | - | - |
| 6 | - | Red |
| 7 | - | Green |
| 8 | - | - |
| 9 | Black | - |
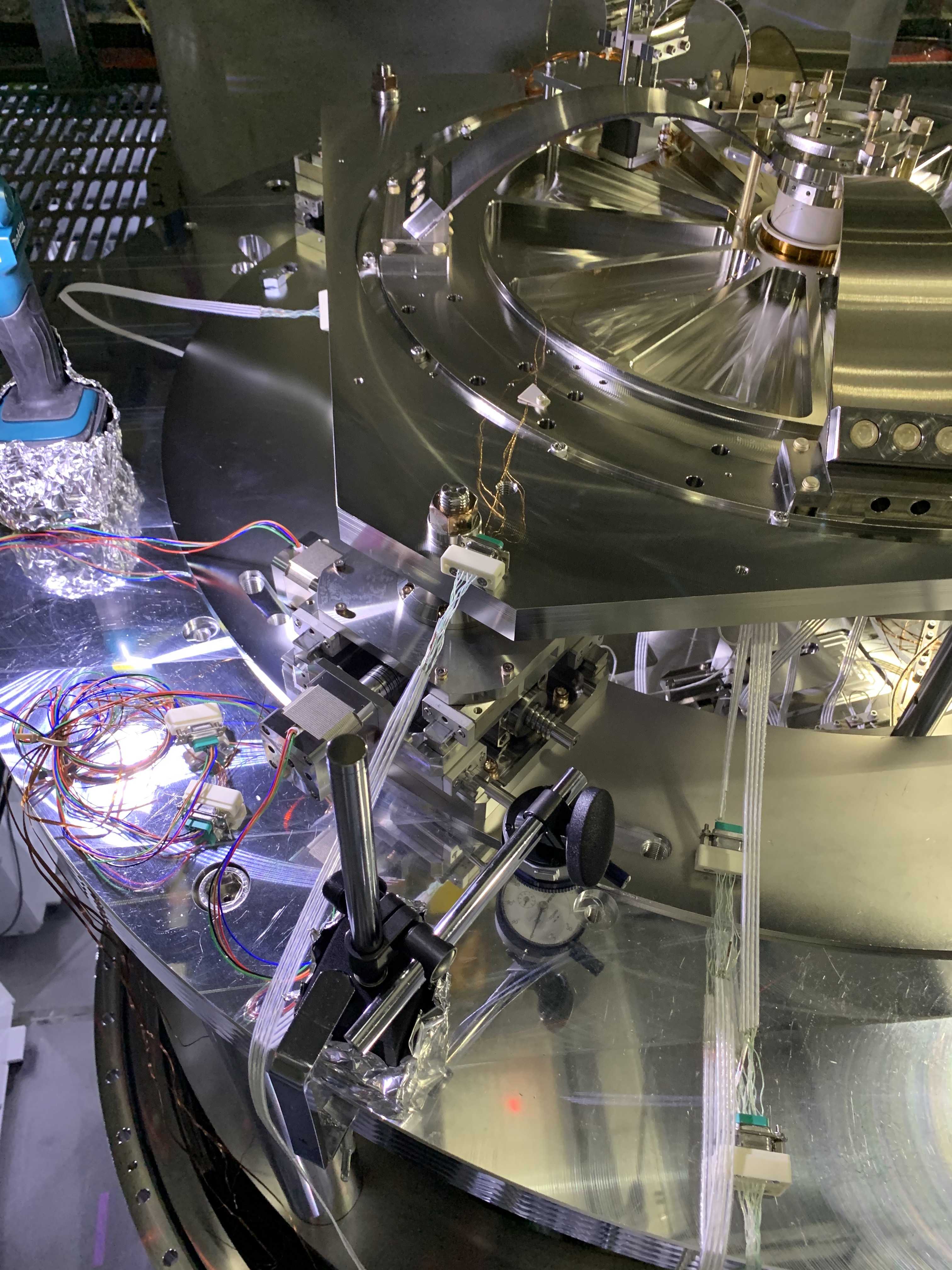
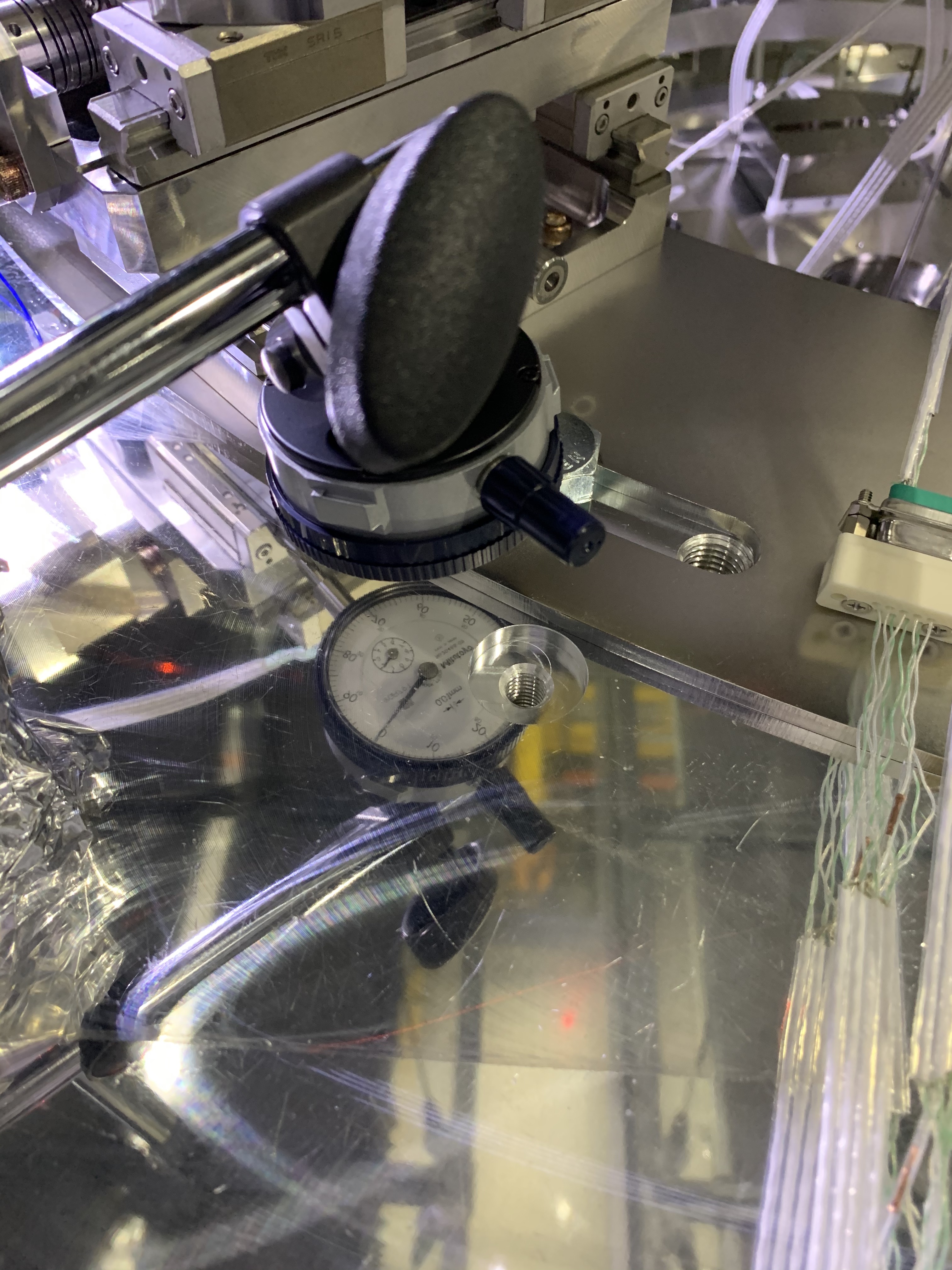
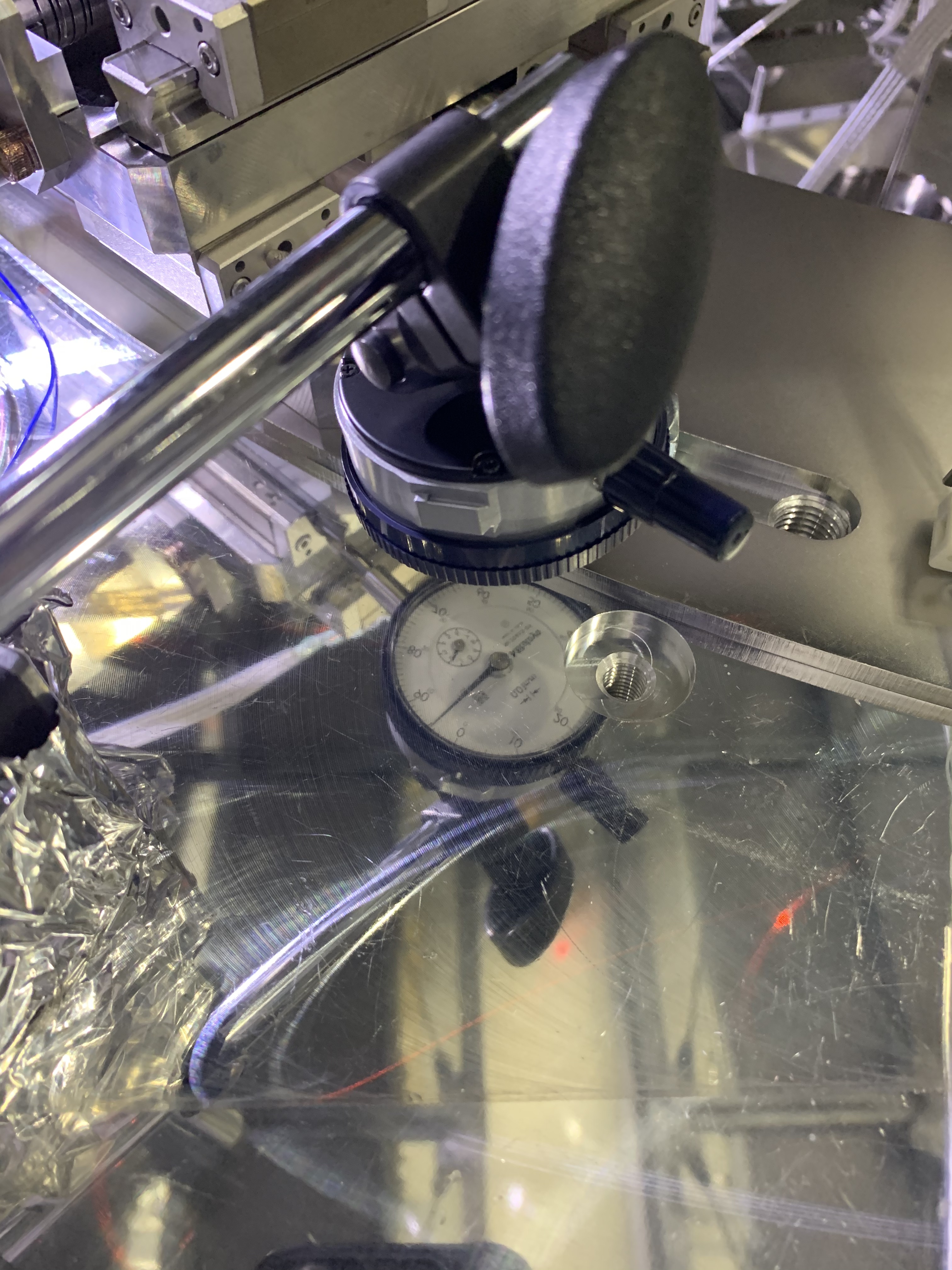
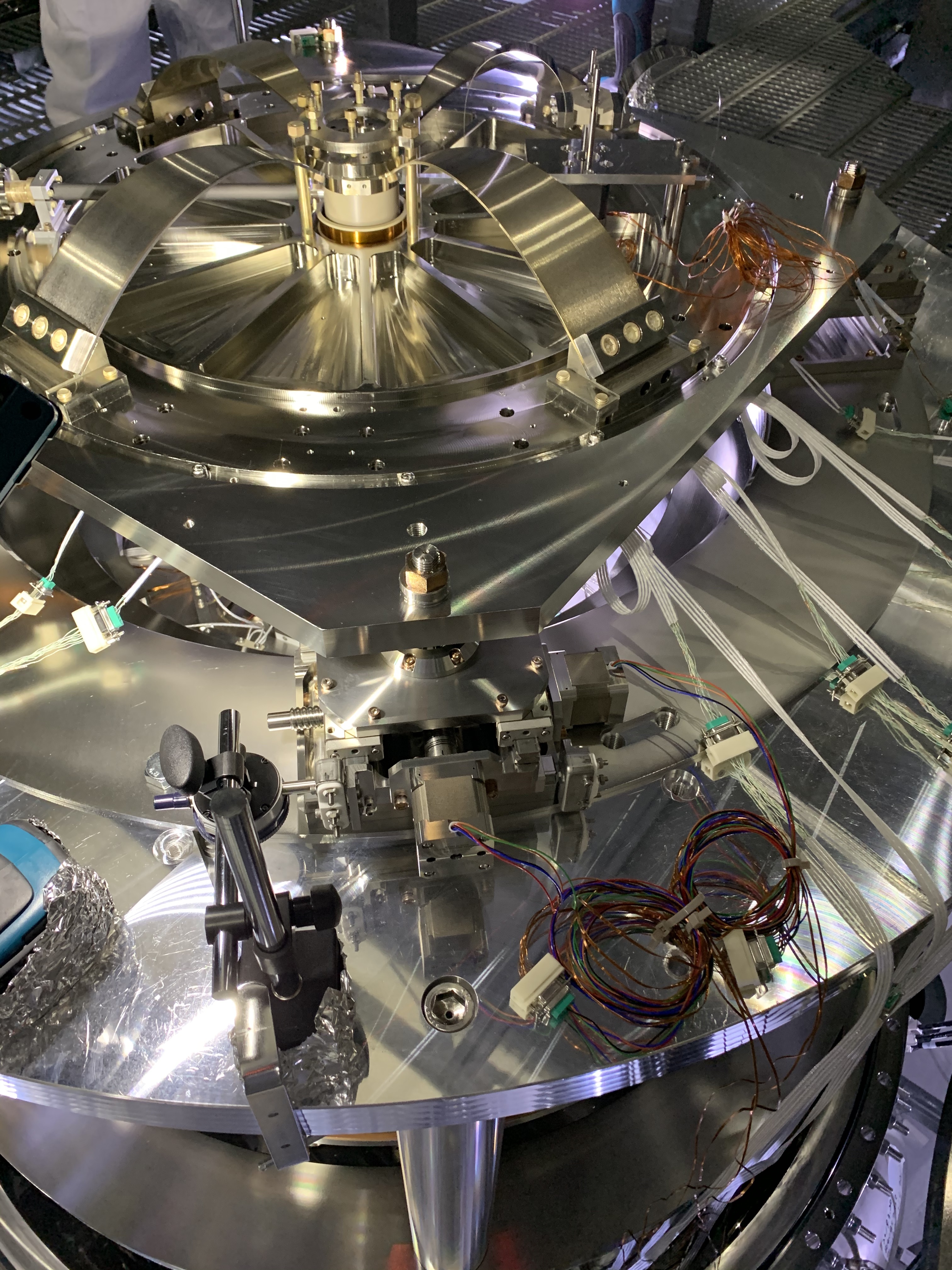
After the modification, the dial gauge was installed and the motor was driven.
We drove the motor from 0 to 50[um] and 0[um] for X(T) and Y(R), respectively, and read the scale of the dial gauge.
It was confirmed that the dials were driven to the specified positions.
X did not return by about 10[um] in the reading of the dial gauge when it was returned to the 0 position, but we judged that it returned to the original position because of the hysteresis and reading error.
From then on, the PR2 and PR3 traversers work directly on the cable with the motor driver () without having to connect a special transducer.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}