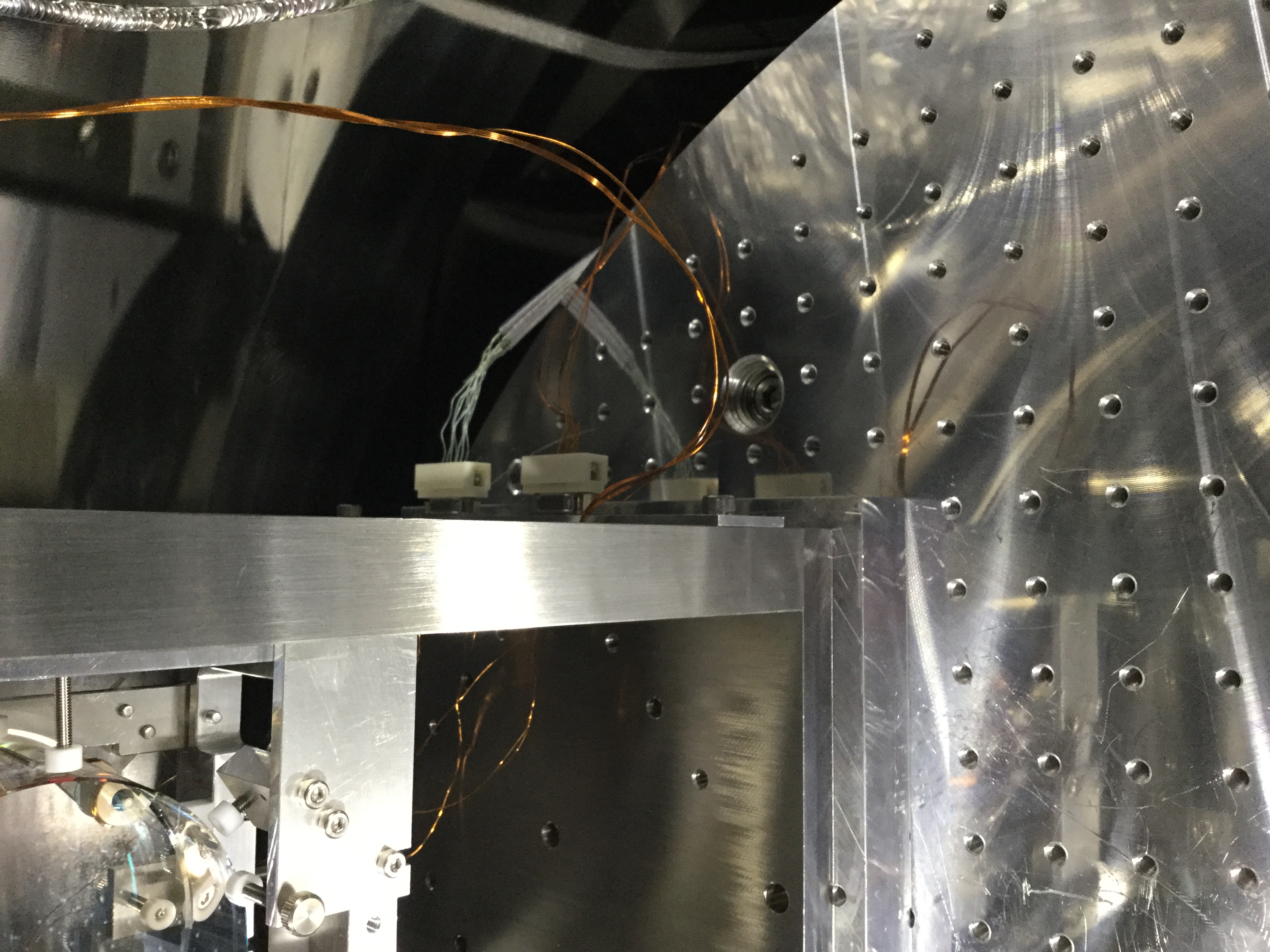
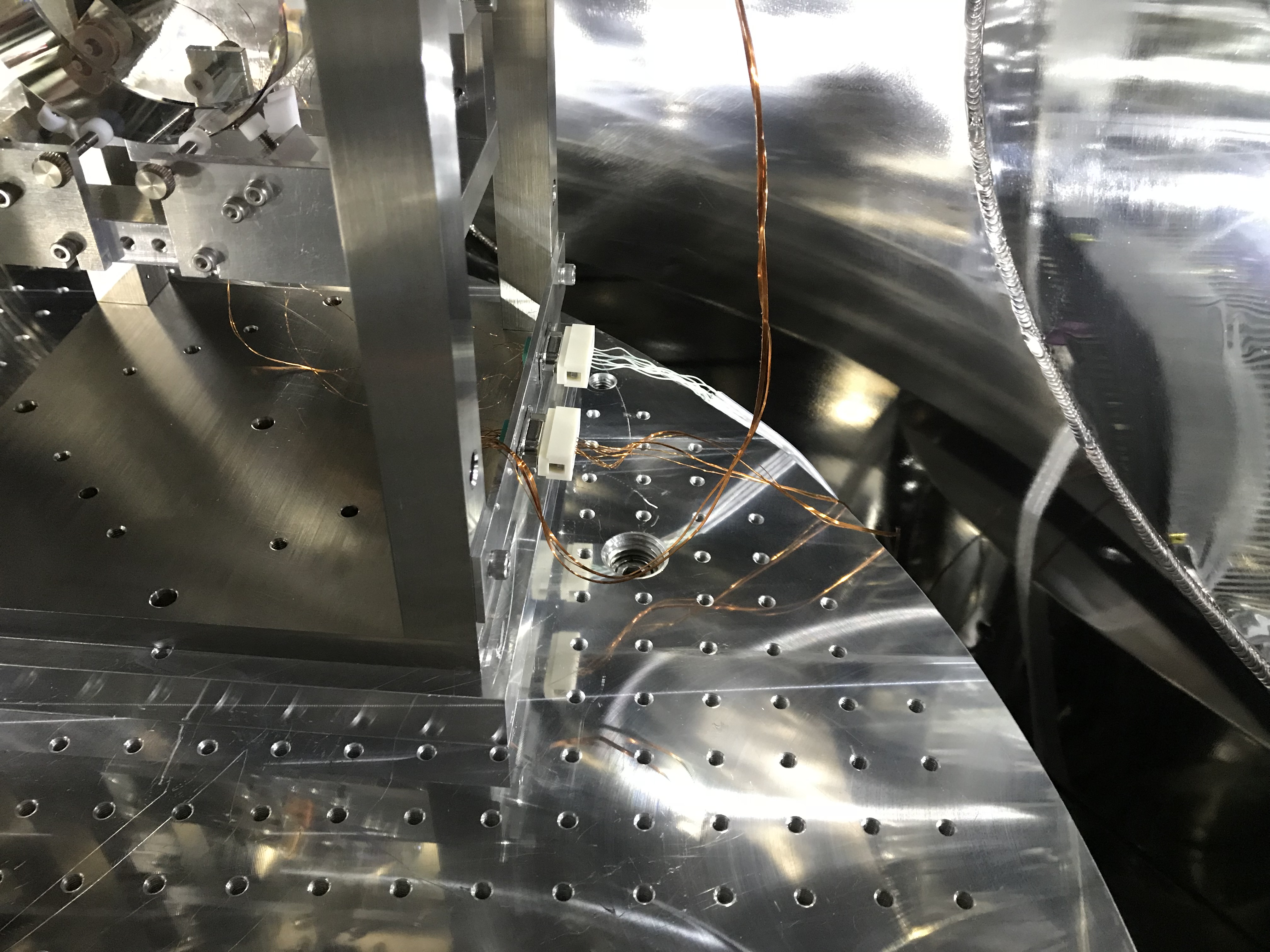
= Movement of IMMT1 suspension frame =
The 1st picture shows the position before the work, while the 2nd shows the position after the work.
This move was done based on 2377.
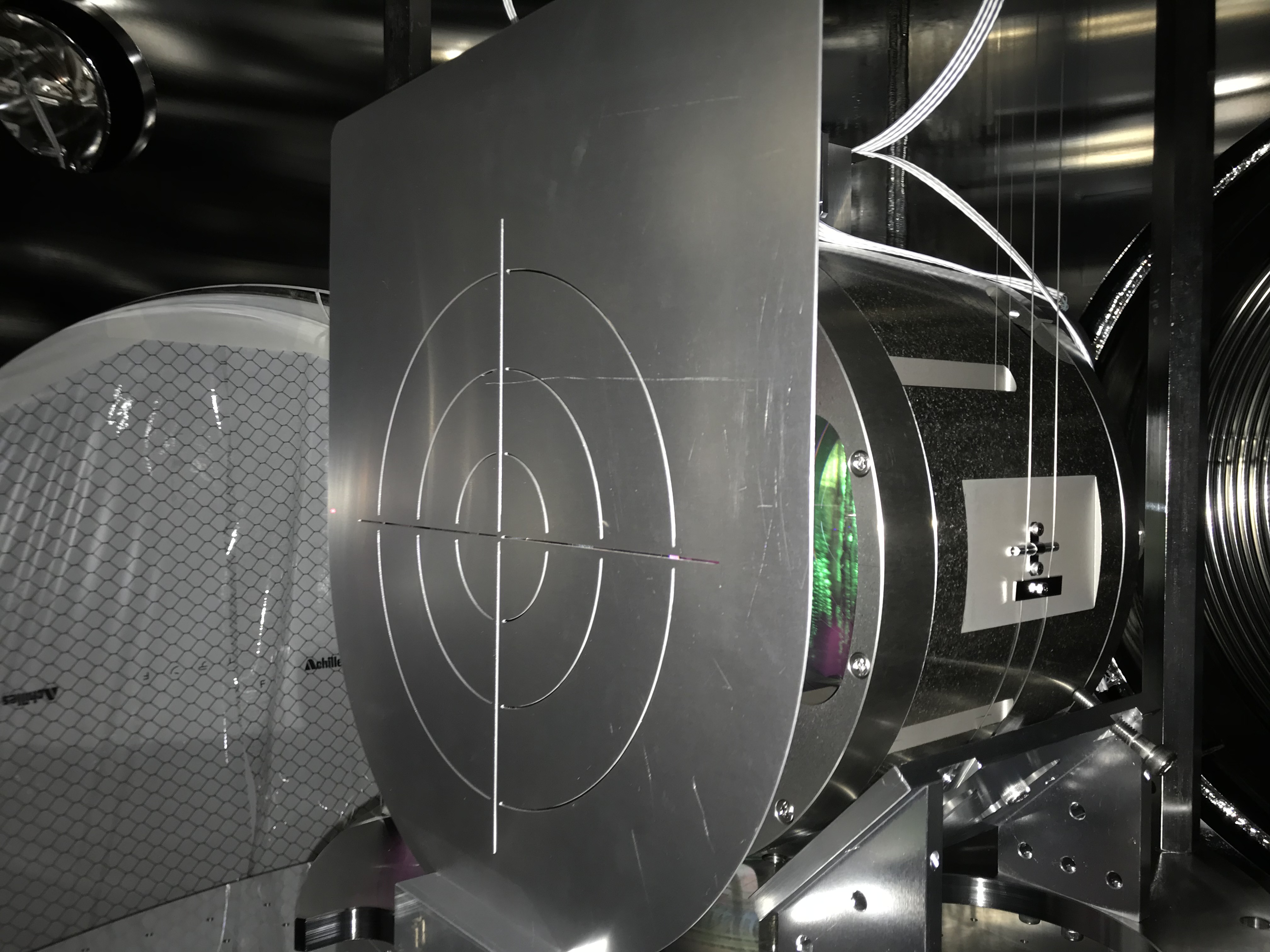
= The beam target =
See the 3rd picture. Cool
= IMMT2 pico =
We tried:
- to move pico with a "joy stick"
- to use another pico driver instead
and we checked the cabling inside/outside the chamber by eyes, but falied.
We don't really know what is wrong.
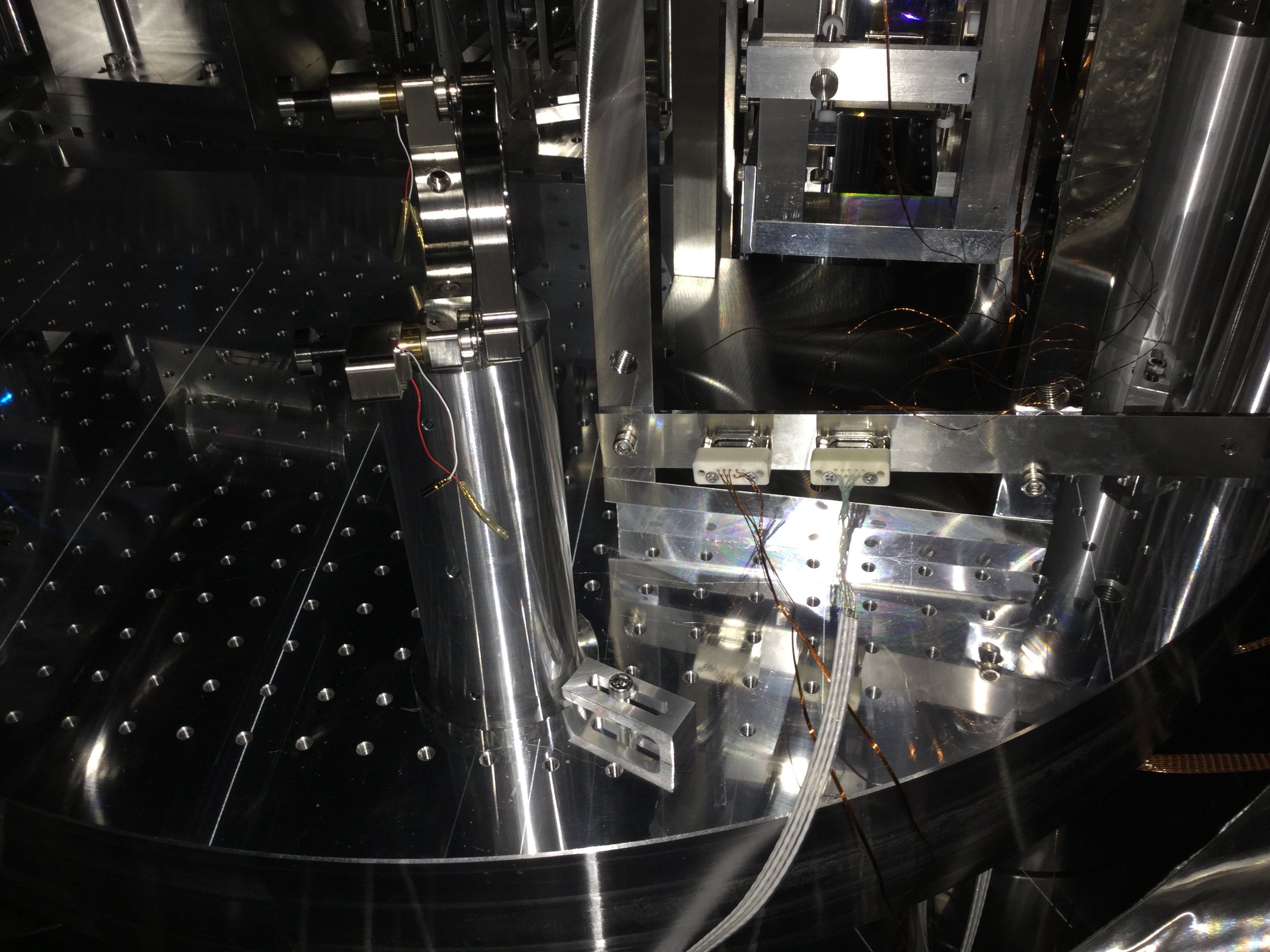
= IMMT2 position =
Just for reference; the 4th picture shows the position before the work, while the 5th and 6th pictures show the postion after the work






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}