[Komori, Enomoto, Izumi, Michimura]
We have made the first NoiseBudget plot for bKAGRA Phase1.
The NoiseBudget model lives in /kagra/kagranoisebudget/bKAGRA1/, and run_Michelson_NB.m is the code and Michelson.slx is the model.
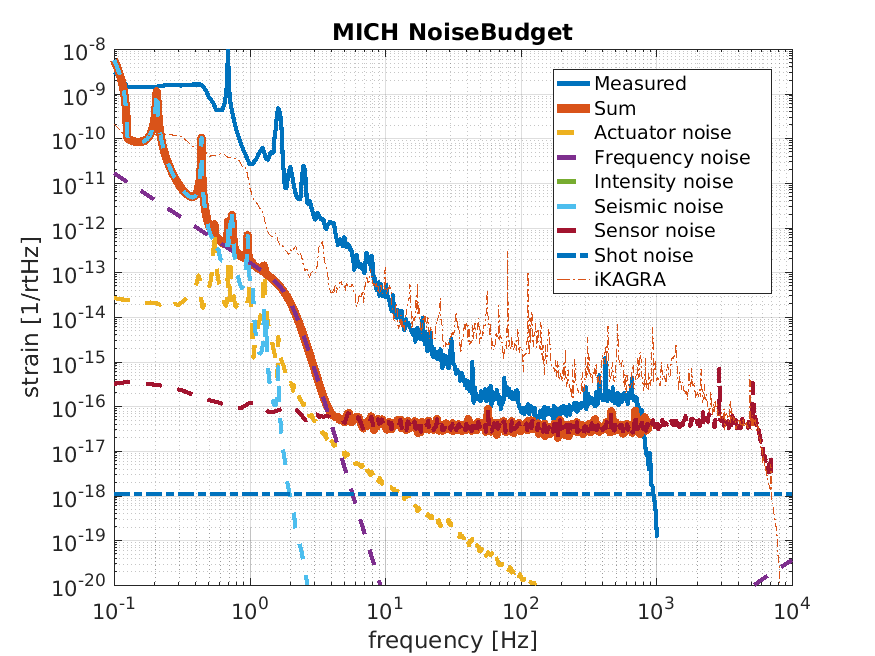
Currently the strain sensitivity is ~1e-16 /rtHz @ 100 Hz, which is limited by the RFPD dark noise.
What we did:
1. Copied iKAGRA NoiseBudget model to bKAGRA1 folder.
2. Modified the code to reflect the updates from iKAGRA:
- Updated BS, ETMX and ETMY suspension transfer functions (acutation and seismic attenuation TFs, including vertical seismic)
- Updated the input and output matrices, LSC MICH filters
- Updated the RF optical gain (~5000 counts * 4*pi/lambda = 5.9e10 counts/m; see klog #4795)
3. Removed some of out-dated stuff in the model
- UGF servo
- Calibration lines
- Acoustic noise
4. Run the code for 64 seconds from GPS time 1208513418 (Apr 23 19:10 JST). At this point, BS IM feedback was not on yet.
Results and discussion:
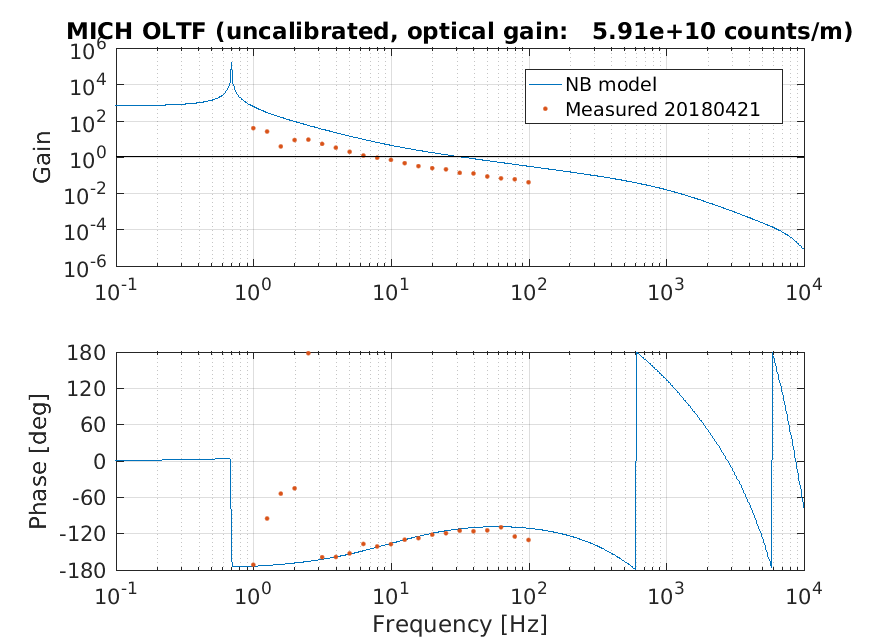
1. MICHOLTF_uncalibrated.png is the plot comparing the expected openloop transfer function from the NB model and the measured one on Apr 21. The model somehow gives larger gain by a factor of ~7. The reason is still unknown, but we suspect that it is from the actuator efficiency descrepancy between the measurement and the model.
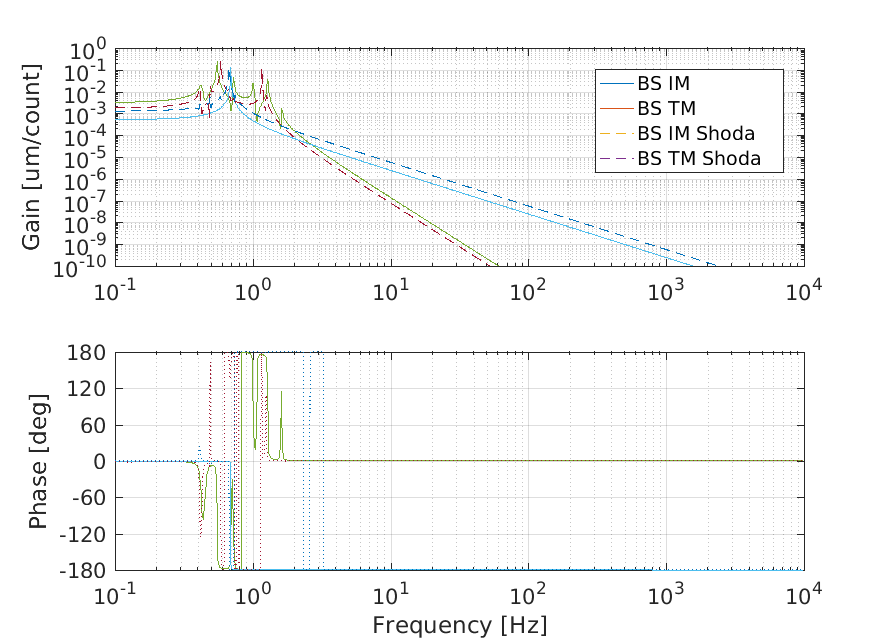
2. BSActuator.png is the plot showing the BS actuator transfer functions in um/counts used in the model. The NB model uses the high power coil driver for BS TM and actuator TFs in /kagra/kagranoisebudget/Suspensions/suspensionTFs/ (which were also used for CQG 34 225001 (2017)). The TFs somehow differ from the output from Shoda-san's code, which lives in /kagra/Dropbox/Subsystems/VIS/Scripts/SuspensionControlModel/script/. Shoda-san's code gives larger TF for TM by a factor of 2.3, and smaller TF for IM by a factor of 0.54. The reason is under investigation.
3. MICHNoiseBuget.png is the preliminary NoiseBudget plot in strain. The sensitivity at ~100-1000 Hz is limited by the dark noise of RFPD (not ADC noise). You can see the sensitivity improvement compared with iKAGRA at this frequency region, thanks to pump-down. Noise below 100 Hz needs further investigation.
at this frequency region, thanks to pump-down. Noise below 100 Hz needs further investigation.
Items to be updated:
1. Remeasure the RFPD dark noise (currently using iKAGRA RF PD dark noise; should be similar).
2. Use real seismic noise (currently using iKAGRA seismometer spectra and bKAGRA suspension transfer functions; shouldn't change so much)
3. Update shot noise (currently using iKAGRA shot noise; should be similar)
4. Update frequency noise (currently using very simple FSS model for IMC in JGW-T1503330)
5. Include suspension thermal noise (also for BS and room temperature ETMX?)



[Komori, Enomoto, Michimura on Apr 24-25]
NoiseBudget for bKAGRA Phase 1 was updated.
Attached plots are NB results at Apr 25 2018 16:10 JST.
SVN revision 2060:
1. Suspension and mirror thermal noise for ETMX at 300K and ETMY at 22K were added (see JGW-T1808172).
2. Added EUL2OSEM factor 0.25 for BS TM (see klog #4811). BS TM actuation efficiency mystery was pertially solved.
3. Added updated RF PD noise (see klog #4818).
4. Updated to use real seismometer signal at specified GPS time (see, also, klog #4351). NOTE that it uses the same signal also for vertical seismic noise.
K1:PEM-IY0_SEIS_NS_SENSINF_OUT_DQ for BS
K1:PEM-EX1_SEIS_WE_SENSINF_OUT_DQ for ETMX
K1:PEM-EY1_SEIS_NS_SENSINF_OUT_DQ for ETMY
5. It now gives open loop transfer function for both BS IM loop and BS TM loop. Attached OLTF is the OLTF from NB at Apr 25 2018 16:10 JST. NB gives IM/TM cross over frequency at ~0.3 Hz, whereas it was set to ~0.1 Hz (see klog #4820).
6. GPStime caption added in the plots.
SVN revision 2061:
1. Updated whitening/dewhitening filters, updated RF PD noise (see klog #4831).
2. Updated optical gain to 1.0e11 counts/m from 5.9e10 counts/m (see klog #4833).
3. It now outputs the noise budget result as a text file.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}