[IZUMI, ELEONORA]
TM sensing diagonalization
According to Izumi-san, the geometry of the optical lever for the BS TM is quite complicated and requires a complex sensing matrix in order to decouple pitch and yaw. Most of the work in order to write this matrix has been already done by Mark and others. We checked that in this configuration the residual coupling between the pich and yaw is lower than 10%.
In order to improve it, we excited pich and yaw one by one at their resoance frequency (0.6 Hz and 1.22 Hz respectively) and recostructed the "total matrix" which transforms pitch/yaw excitation into pich/yaw sensing (composed by the geometrical coupling and Mark digital sensing matrix). Since this "total matrix" has still some small off-diagonal elements we have computed its inverse and multyplied it for the Mark's sensing matrix in order to find a new, better diagonalized sensing matrix.
The coefficients of the new sensing matrix are:
1.1079 2.5574
2.9483 -1.6017
The residual coupling now is of the order of 1%.
TM coil balancing
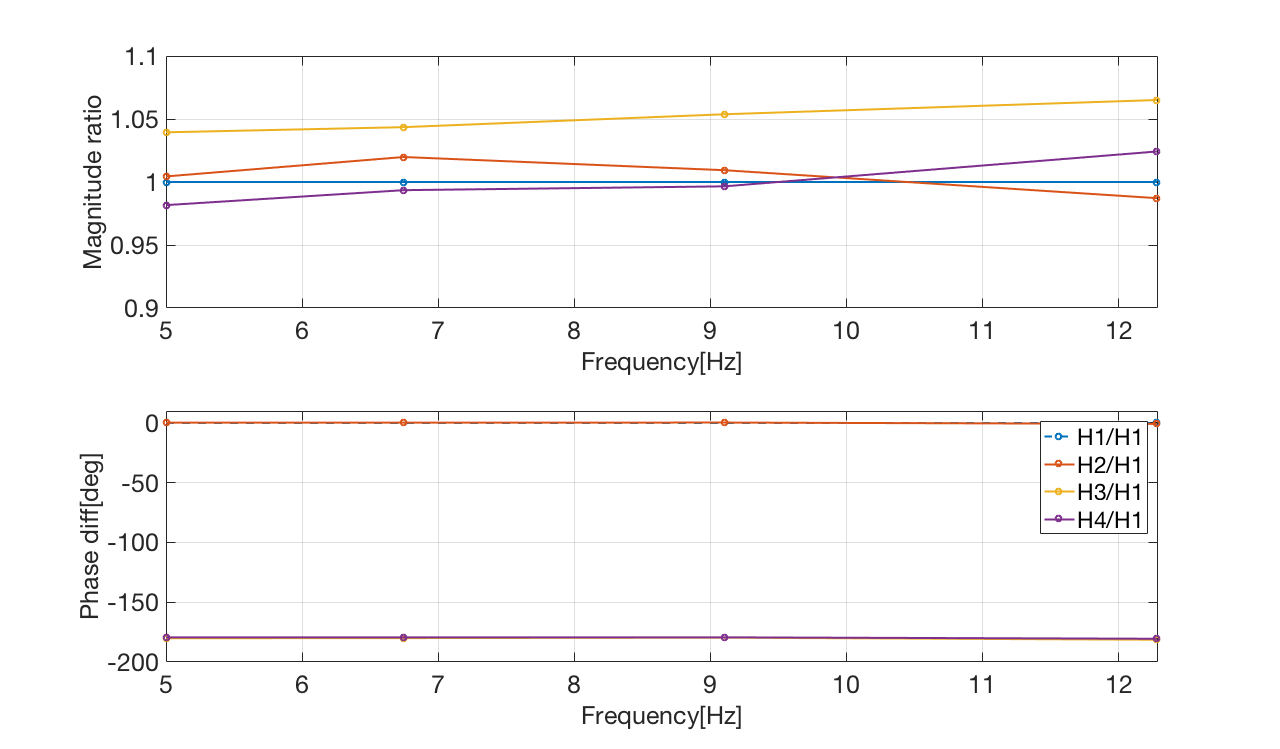
Once we were statisfied with the sensing diagonalization we moved to the driving. We followed a procedure similar to that used for the IMC. We excited the magnets one by one at different frequencies and measured the signal in yaw. Due to the symmetry of the magnet disposition, the signal is expected to be the same for all. We measured a difference below few percents (see pic1), meaning that the coil balancing was already pretty good. Anyway we have updated the coil balancing values taking the mean of the measured values.
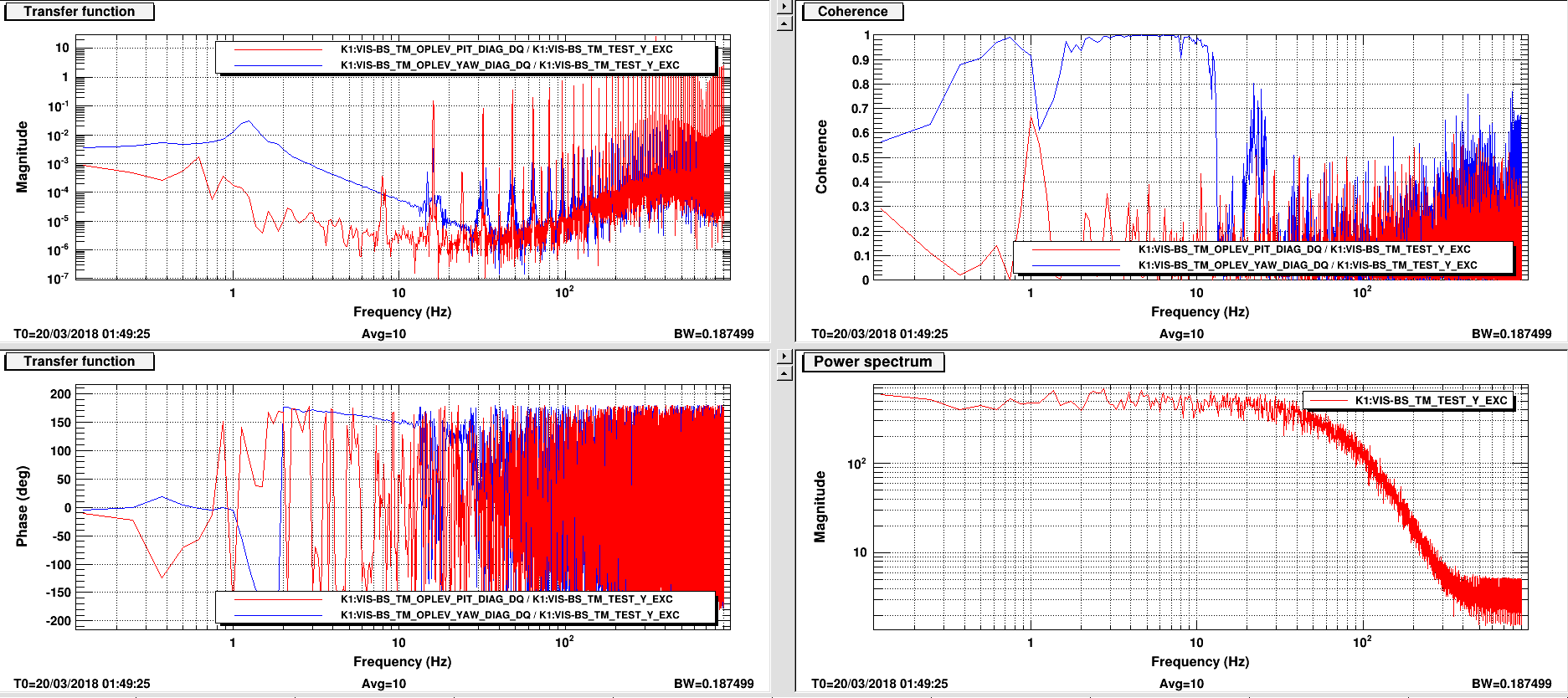
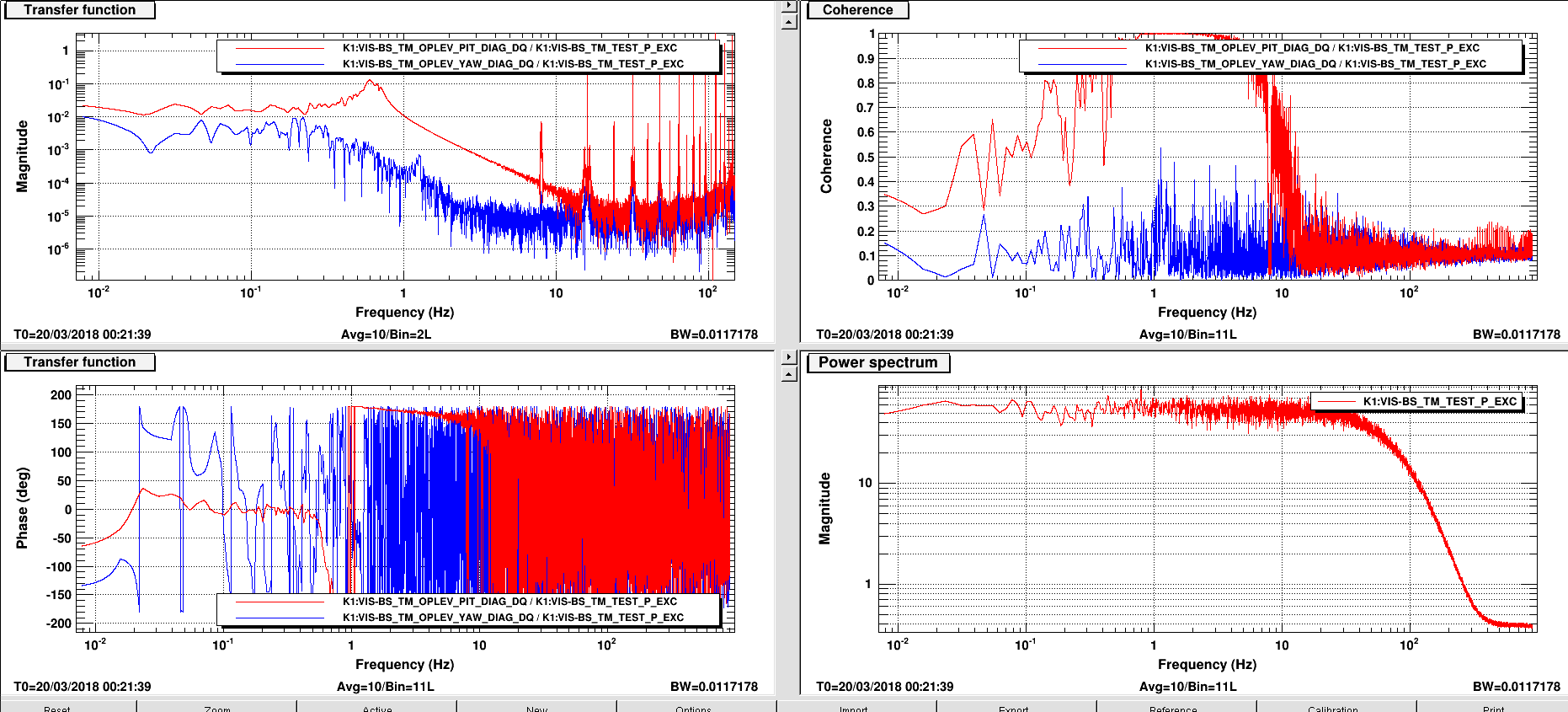
After finishing we have measured the direct and cross trasfer functions between yaw and pitch. They seem quite well decoupled (See pic 2 and 3).
We remarked that even if the noise was injected up to about 100 Hz we could't have any coherence above 10 Hz. The signals, there, are likely to be limited by sensing noise.



{kind=link}
{kind=link}
{kind=link}