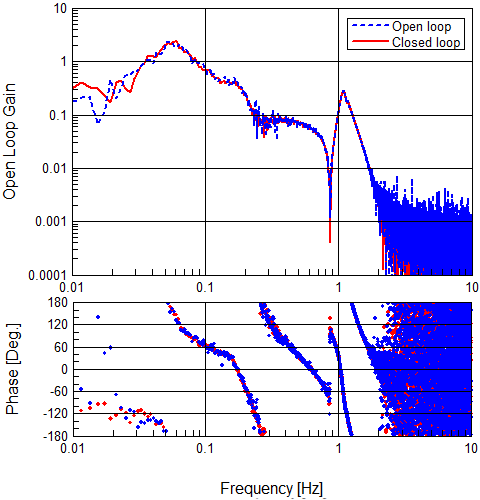
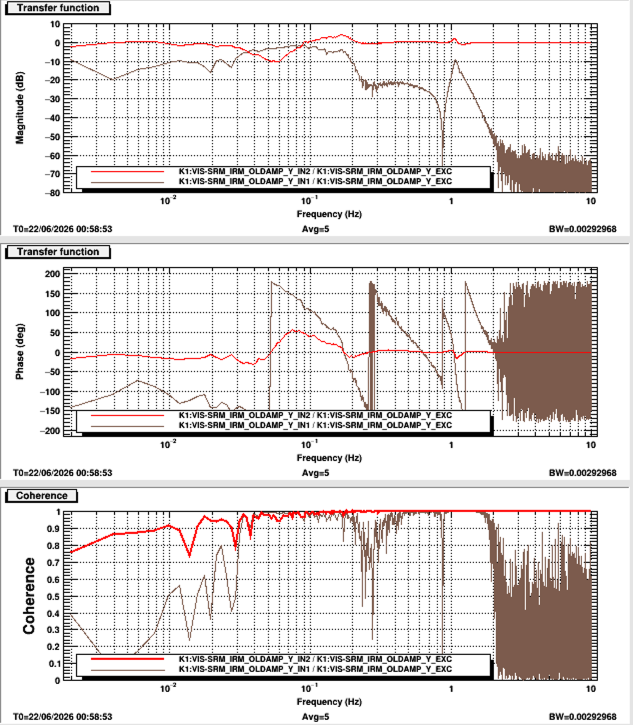
I measured the open-loop gain of the IRM damper servo in both cases where the loop is open and closed. The maximum gain was about 3, the phase margin at the UGF was about 70 deg, and the gain margin at 160mHz was about 2. The second plot shows each transfer function in the closed loop.


{kind=link}
{kind=link}