I applied following changes to SDFs during OBSERVATION state.
These changes are performed during today's commissioning works (klog:34267)
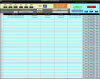
K1ASC1 model
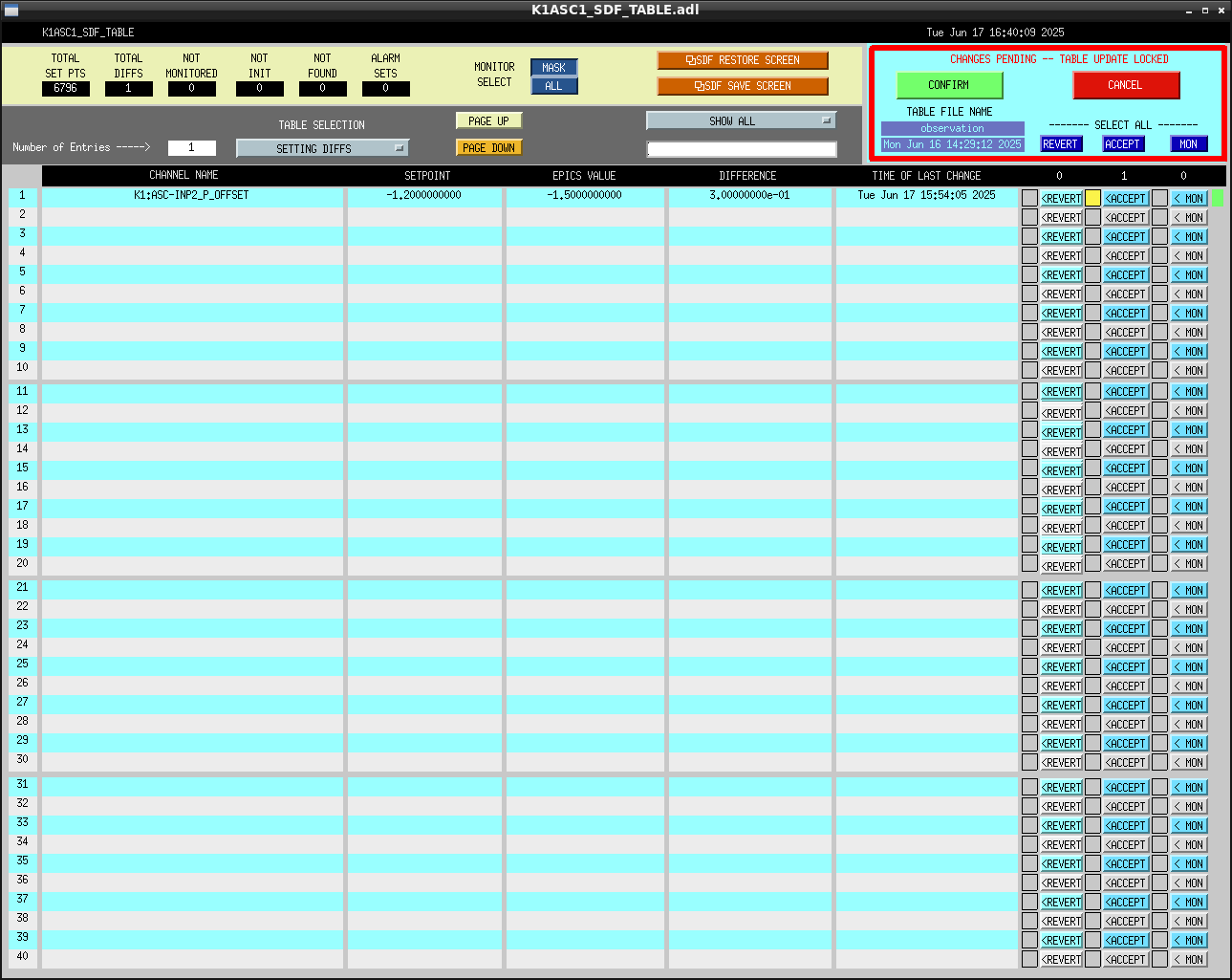
K1:ASC-INP2_P_OFFSET (Fig.1):
We changed this offset to reduce the jitter coupling, and this modification was accepted.
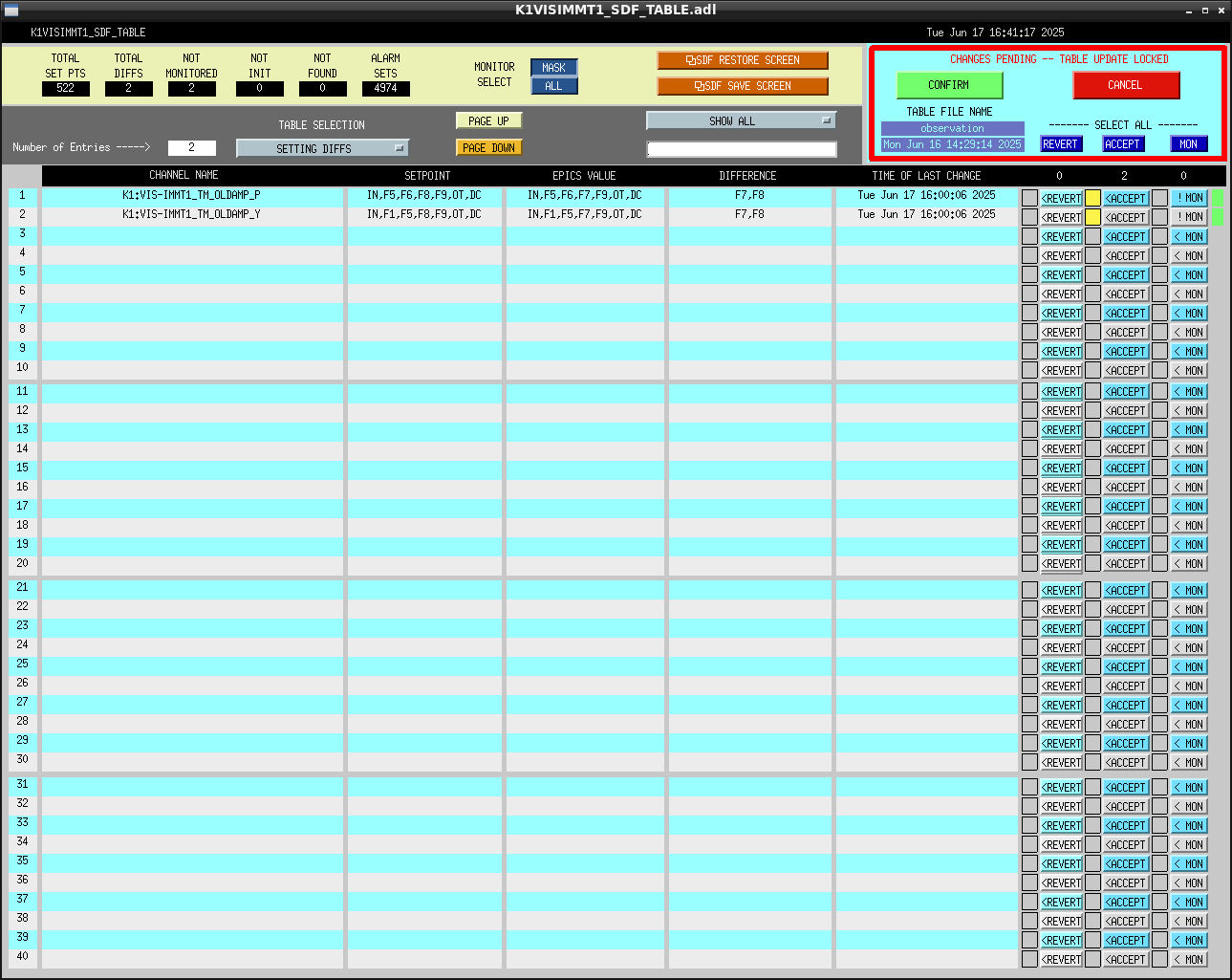
K1VISIMMT1 model
K1:VIS-IMMT1_TM_OLDAMP_{P, Y} (Fig.1):
We changed these offsets, turned off FM8, and turned on FM7 to implement the DC control of IMMT1 pitch and yaw, and this modification was accepted.
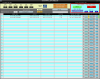
K1ASC1 model
K1:ASC-INP2_P_OFFSET (Fig.2):
We changed this offset to reduce the jitter coupling, and this modification was accepted.
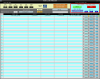
K1VISITMYLSC model
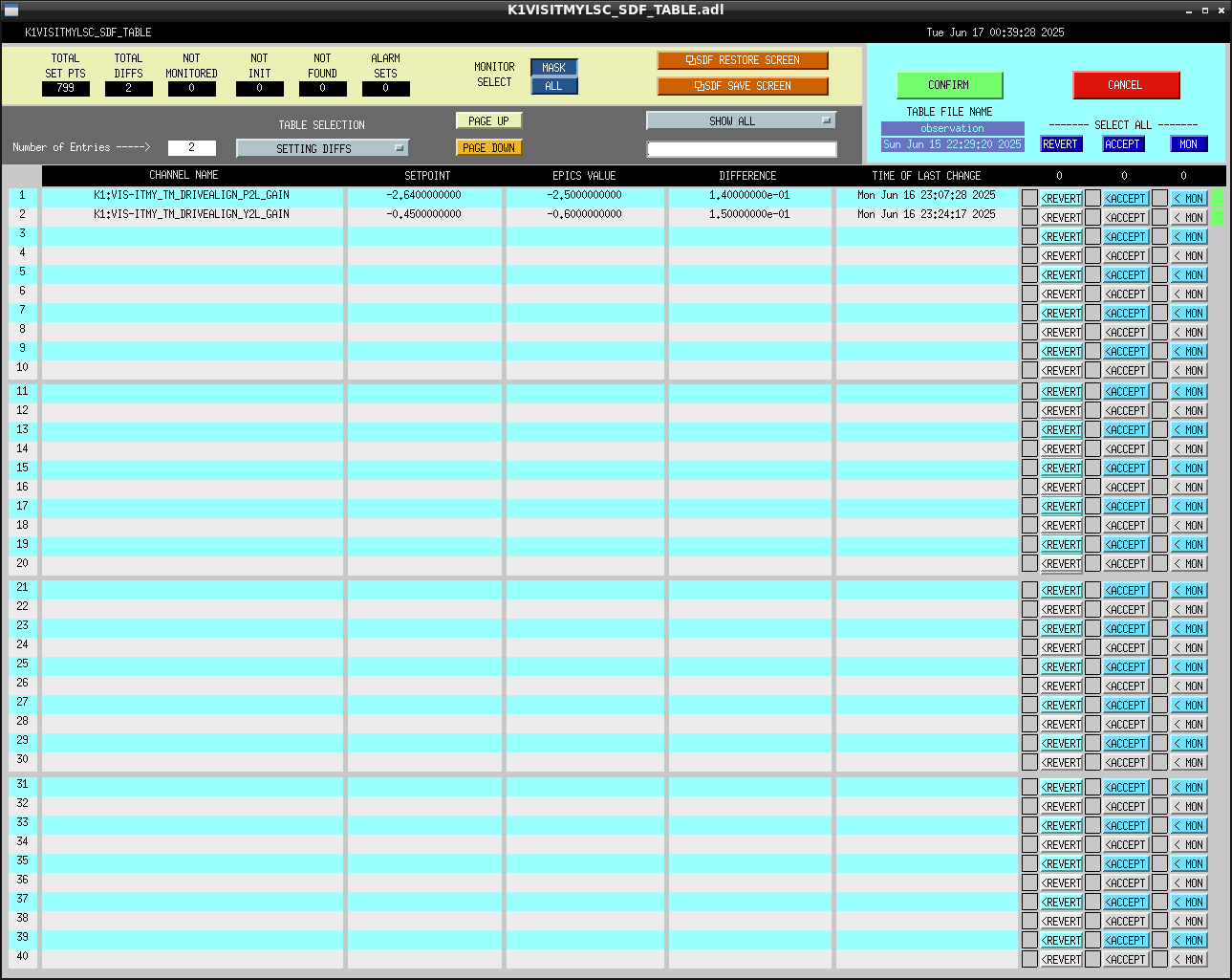
K1:VIS-ITMY_TM_DRIVEALIGN_{P, Y}2L_GAIN (Fig.3):
We changed these values to reduce the jitter coupling, and this modification was accepted.
{kind=link}
{kind=link}
{kind=link}