Abstract
We are now planning to use a special coil driver for ETMX which has 30Hz:3Hz zero/pole pairs instead of 10Hz:1Hz pairs.
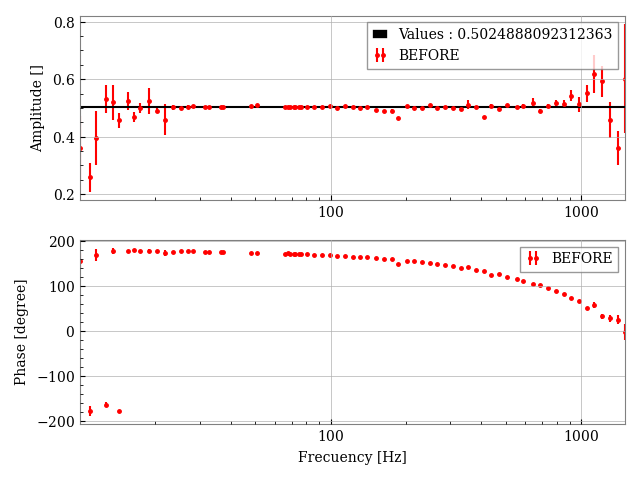
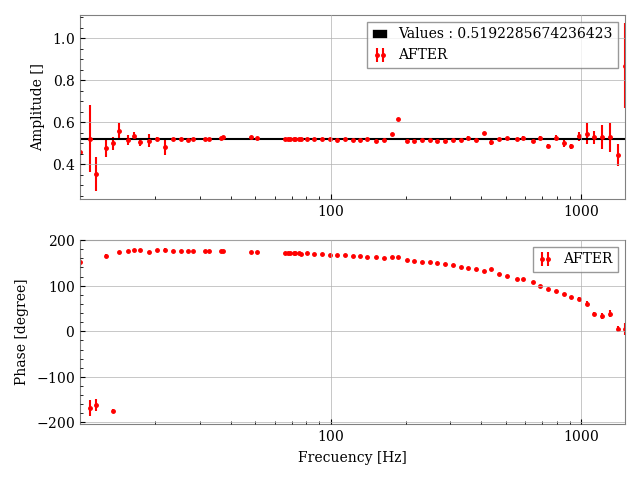
Pre-test of circuit measurement is ongoing and progress is reported in klog#33854.
We noticed that this special coil driver has different response from normal coil driver not only when dewhitening is enabled but also when it's disabled.
We also found that this response with disabling dewhitening makes ~10% bias as maximum by changing a number of dewhitening stages.
This effect may makes a non-negligible calibration errors in the case of parallel execution of observation and working with observation
It's not so difficult to compensate these two effect only for front-end calibration or only for low-latency calibration.
But an additional consideration about the operation is required to make the correction consistent for both front-end and low-latency calibration.
Details
Difference between normal and special coil drivers
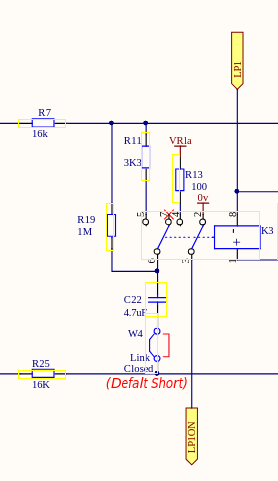
zero/pole frequency of dewhitening filter is decided by R7 (should be same value as R25), R11, R19, and C22 in Fig.1.
- zero = 1 / [ 2 * pi * (C22 * 2) * (R7 + (R11 || R19) * 0.5) ]
- pole = 1 / [ 2 * pi * (C22 * 2) * (R11 || R19) * 0.5) ]
For changing zero/pole pairs from 10Hz/1Hz to 30Hz/3Hz, C22 was changed from 4.7uF to 1.5(1.6?)uF.
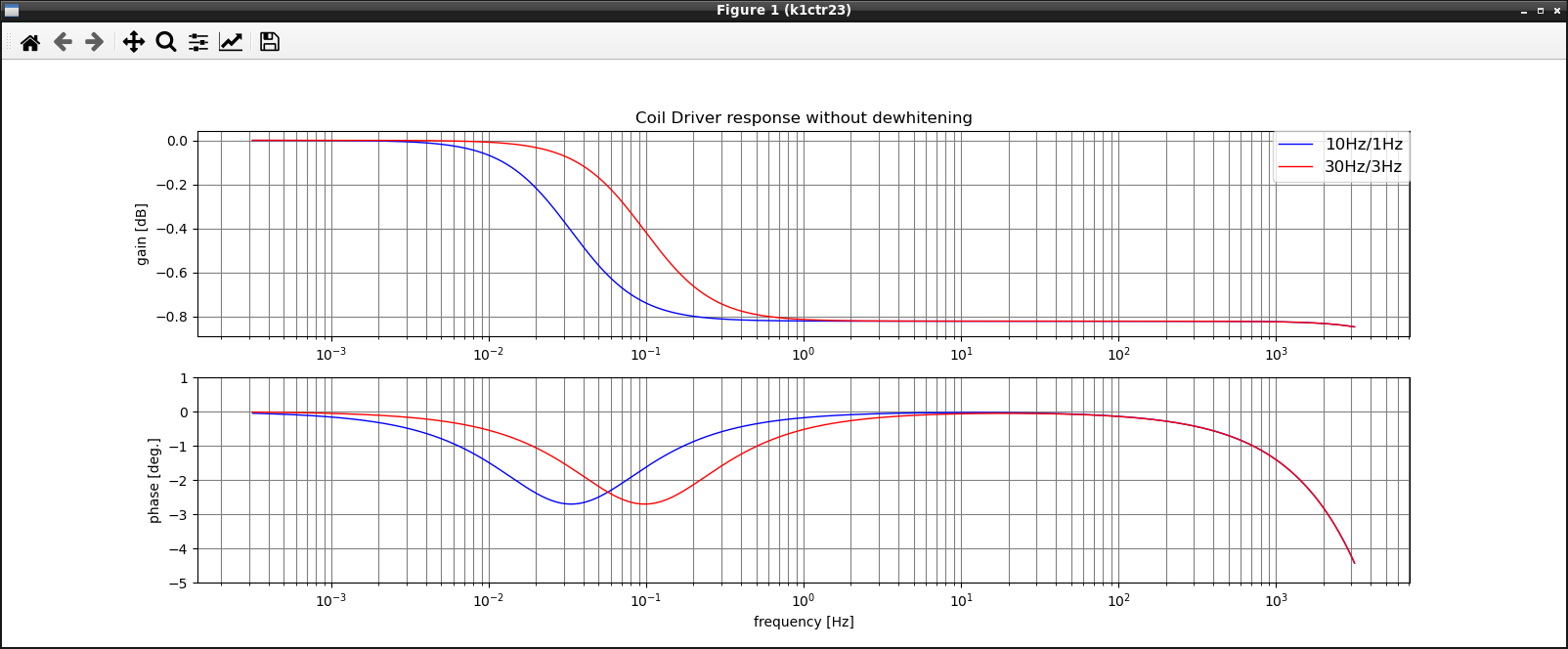
In this circuit, positive and negative paths are connected via R19 and C22 even when dewhitening is turned off. As a result, frequency dependency appears also in the case of disabling dewhitening as
- zero = 1 / [ 2 * pi * (C22 * 2) * (R7 + R19 * 0.5) ]
- pole = 1 / [ 2 * pi * (C22 * 2) * (R19 * 0.5) ]
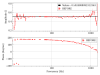
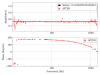
These values are ~0.03Hz in the normal coil driver and it can be regarded as flat response above 1Hz. On the other hand, they becomes ~0.1Hz in the special coil driver and it cannot be negligible especially for TF phase. (Response of normal and special coil drivers are shown in Fig.2.) If we will decide to use the special coil driver, we need to compensate them with accurate parameters which will be measured after the installation.
Operation for the parallel execution of observation and working with observation
In the case of normal observation, we can fix a number of used dewhitening. So we can take into account a gain above 10Hz of coil driver without dewhitening filter as a part of the actuator efficiency. But in the case of parallel execution of observation and working with observation, we cannot fix a number of use dewhitening and it might be changed. This effect corresponds to 0.8dB (~10%) as shown in Fig.2. The easiest way to compensate this effect and to keep front-end calibration is applying compensation filters in COILOUTF. But this way seems to be some problem on low-latency calibration according to a chat with Hido-kun. We don't have any good idea yet to keep low-cost to manage both front-end and low-latency calibrations. Though there is not so much time to consider it, we need a better solution.

{kind=link}
{kind=link}
{kind=link}
{kind=link}