Ushiba, Tanaka
## Abstract
We implemented the following ASCs
- PR3 and BS ASC with WFS instead of ADS
- ITMX BPC with PRM instead of PR3
Thanks to these ASCs, especially PR3 and BS ASC with WFS, PRFPMI seems to be the stablest ever in terms of the fluctuation of Arm trans. power and POP90. And we reach this state if we request the LSC_LOCK guardian to go to the PRFPMI_RF_LOCKED state. PRFPMI is ready for the DC readout.
## What we did
- We tuned the parameters(gain, resG, etc.) of ARM ASCs based on the spectra of the error signals and tuned the gains or the modulation amplitudes of ADS, but they were ineffective in improving the stability. During the trial, the CLK_GAIN of IMMT2 ADS decreased to 1/10.
- Ushiba-san found that REFL RF45 WFS signals grew when POP90 dropped. According to the phasor diagram in klog31128, PR3 could be seen in REFL RF45 if CHARD and CSOFT were suppressed well. So, we attempted to control PR3 alignment with REFL RF45. We used REFL 45 I QPD1 as the PR3 Yaw sensor and REFL 45I QPD2 as the PR3 PIT sensor. We feed back the signal to the setpoint of the oplev DC control. First, we implemented the integrator in the PRC2_{P, Y} filter bank so that each UGF was 0.1 Hz. Before closing the loop, we turned off the ADS of PRM. Then, we decided on the sign of the loop to close the loop. Since the loop seemed to be stable, we increased the gain gradually. Finally, the gain increased to +18dB. Similarly, we implemented the PR3 PIT loop. After that, The fluctuation of POP90 seemed to be somehow small. So, we tried to implement BS ASC.
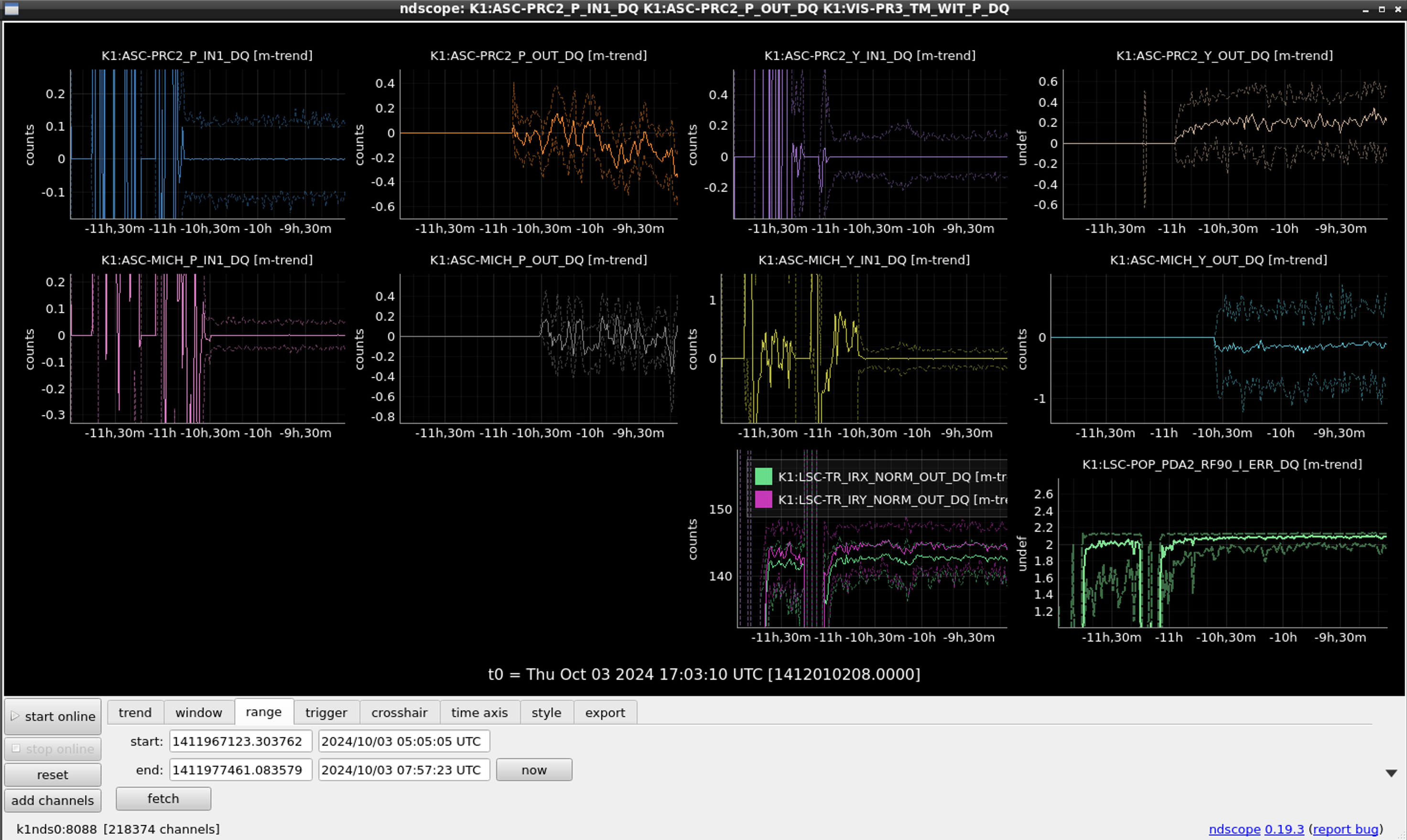
- The WFS combination for BS ASC was already prepared, as reported in klog31179. We used this combination for BS WFS; then, we implemented BS ASC with WFS by the same procedure as PR3 ASC. After that, The fluctuation of POP90 seemed to become small drastically. (Fig. 1)
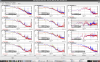
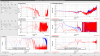
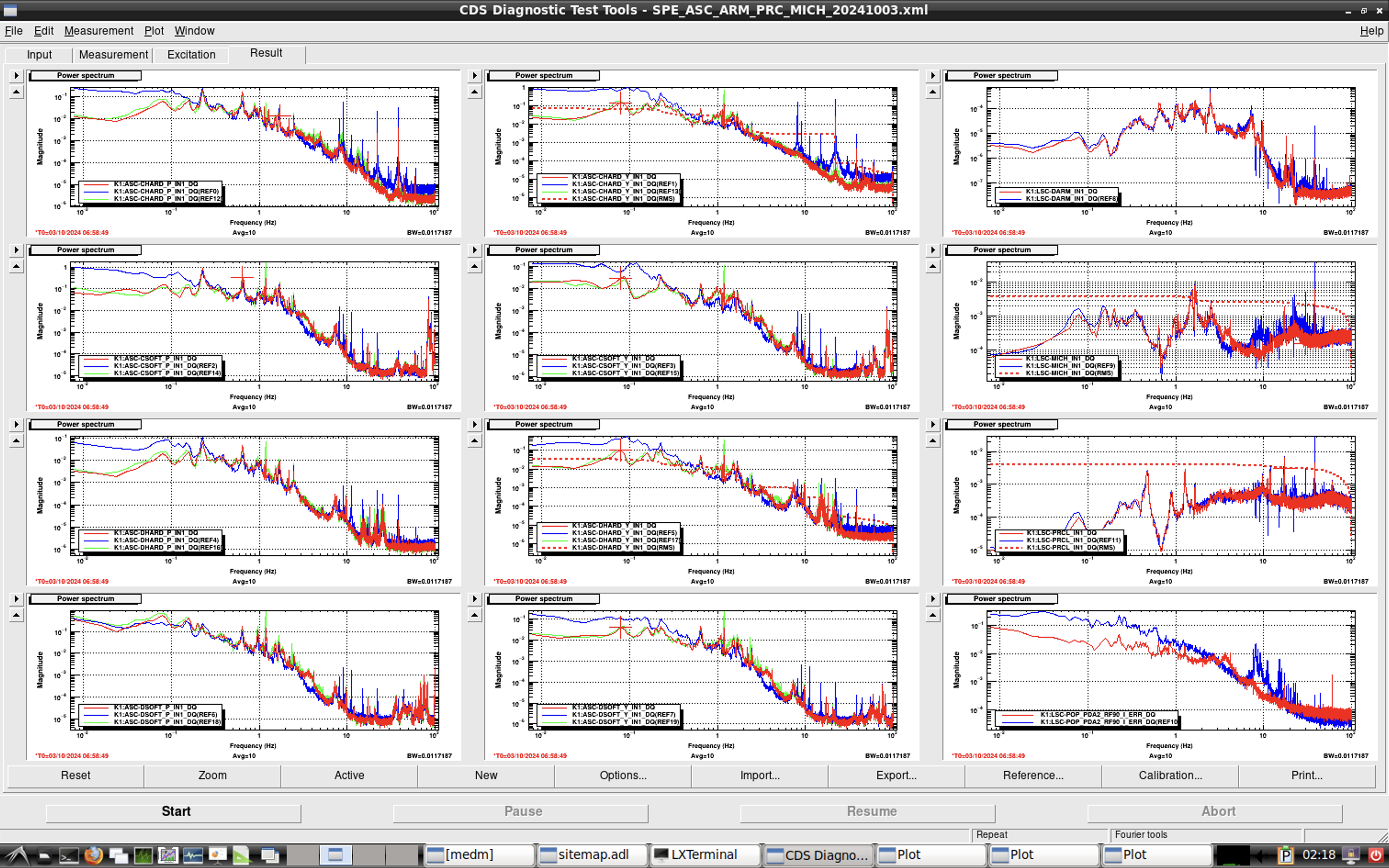
- Fig.2 shows the spectra of ARM ASC, LSC, and POP90. Red lines are the spectra with ASC; blue lines are without ASC. As you can see, POP90 fluctuation decreased. Fig.3 shows the spectra of PR3 and BS ASC. We found that a 1.18 Hz peak can be seen in some ASC error signals. So, we implemented the notch at 1.18 Hz in HARD and SOFT loops. Then, the 1.18 peak decreased.
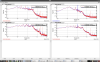
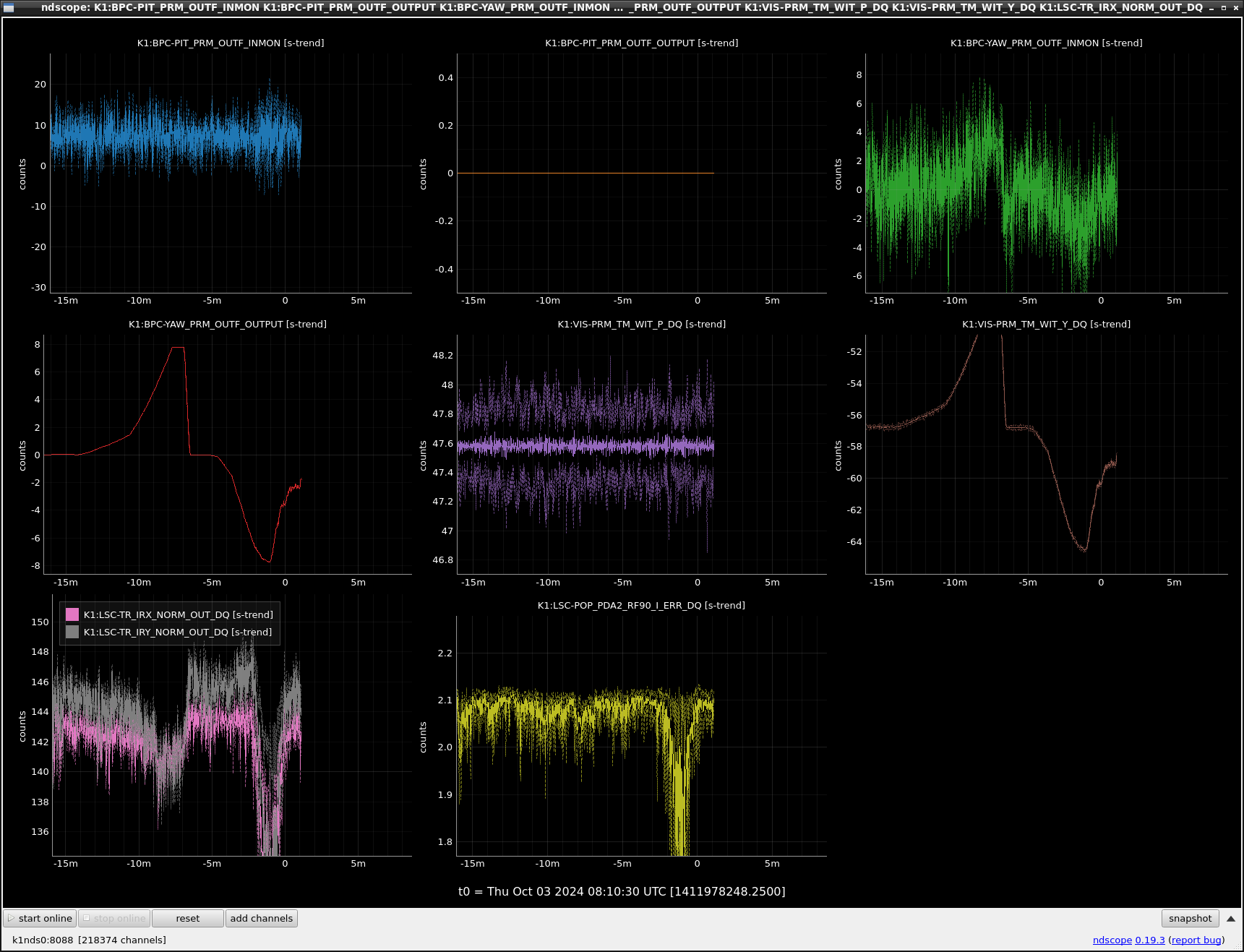
- Originally, we used PR3 for ITMX BPC. So, we decide to use PRM for ITMX BPC instead of PR3. We adjusted the gain of ITMX BPC. In this state, we tried to find the optimal beam position on ITMX in the horizontal direction by scanning the Yaw setpoint from -4 to +4. We found the beam position was optimal because both arms' trans. powers were maximum when the setpoint was 0. (fig.4) Then, we closed the ITMX BPC PIT loop. When the error signal became close to 0, the other loops seemed to start an oscillation. We are not sure of the reason why the oscillation starts when the setpoint is close to 0 for now. Anyway, we adjusted the actuator balance of ITMX so that the setpoint was 0 with the current beam position.
- During the implementation, we found that the DARM and MICH sensitivities around 20 Hz were getting bigger and smaller. The noise shape seems to be the scattered noise. Gauch may be useful to identify the cause.
- We tried to implement PR2 BPC. However, the PR2 movement was compensated by PR3 because their Gouy phases are close (Fig.5). So we decided to leave PR2.
- We implemented two states (SWITCH_ADS_TO_WFS_PRMI, ENGAGE_ITMX_BPC) in the ASC_LOCK guardian so that the above controls were engaged automatically.
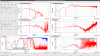
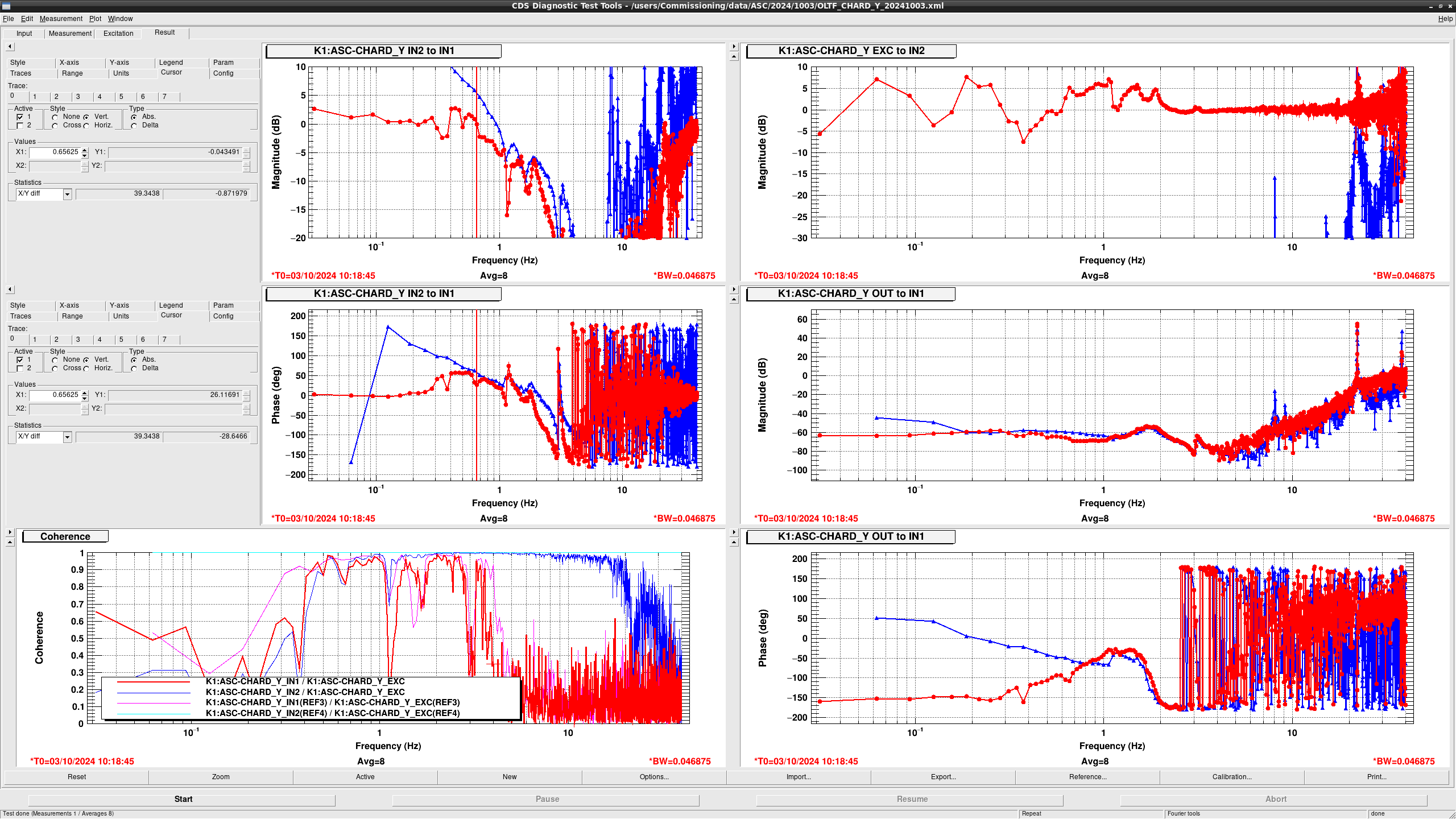
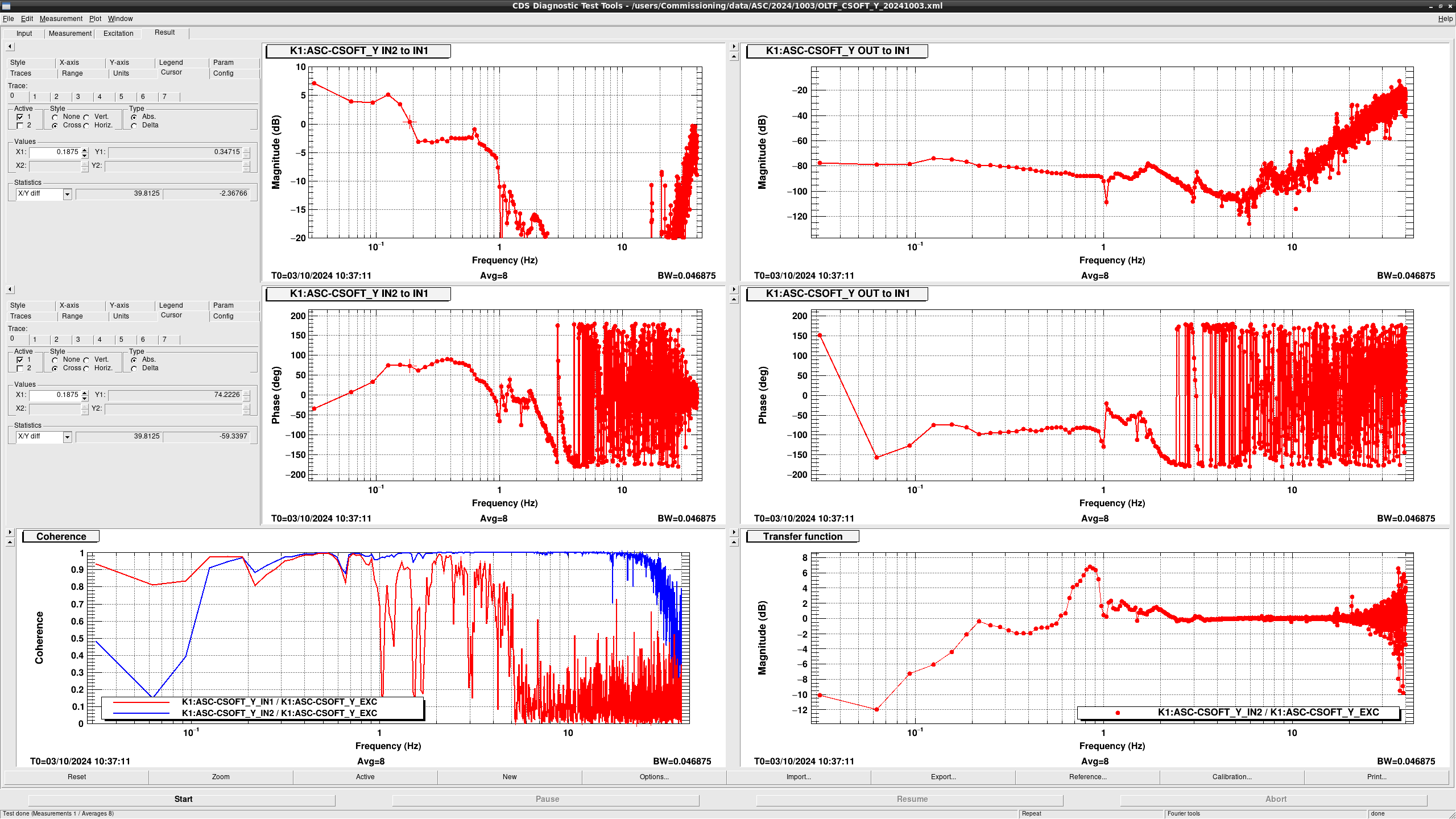
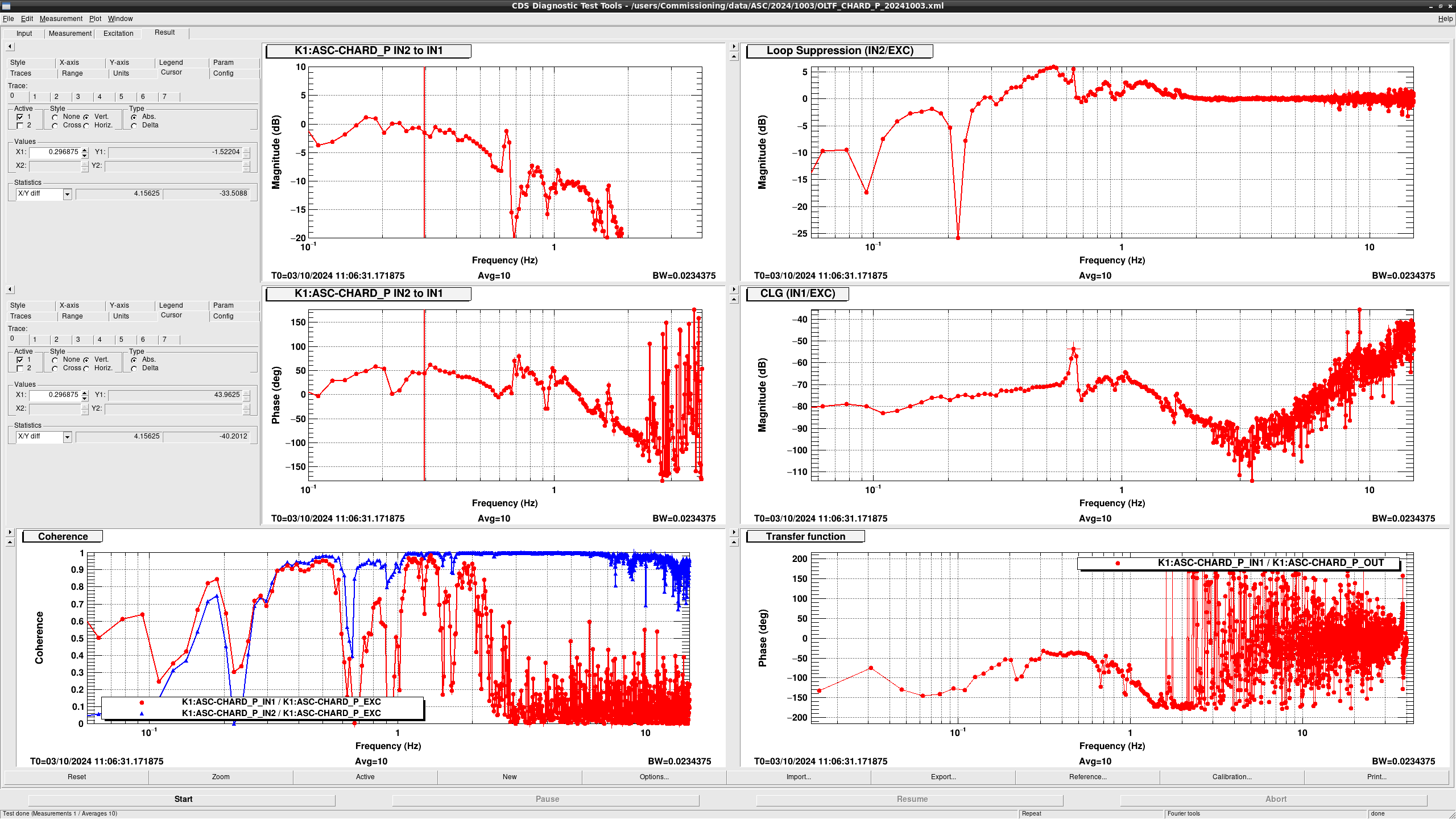
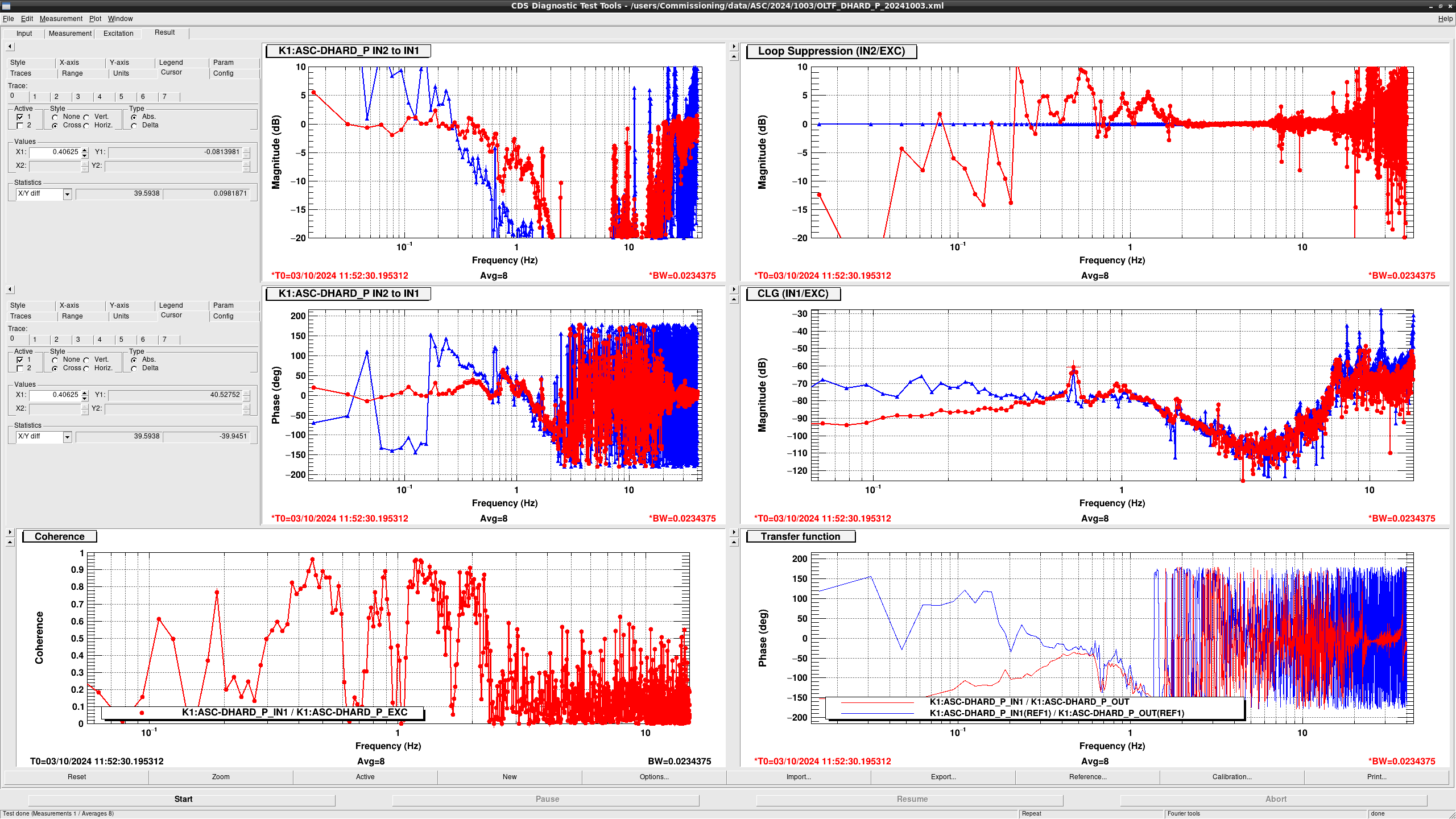
- Finally, we measured the OLTFs of ARM ASCs except for CSOFT_P. Fig. 6 - 12 show the results.
## Next
- Measure the OLTFs of the rest loops.
- Check the coupling of the DARM offset









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}