Komori (remote), Takano, Tanaka, Ushiba
Abstract
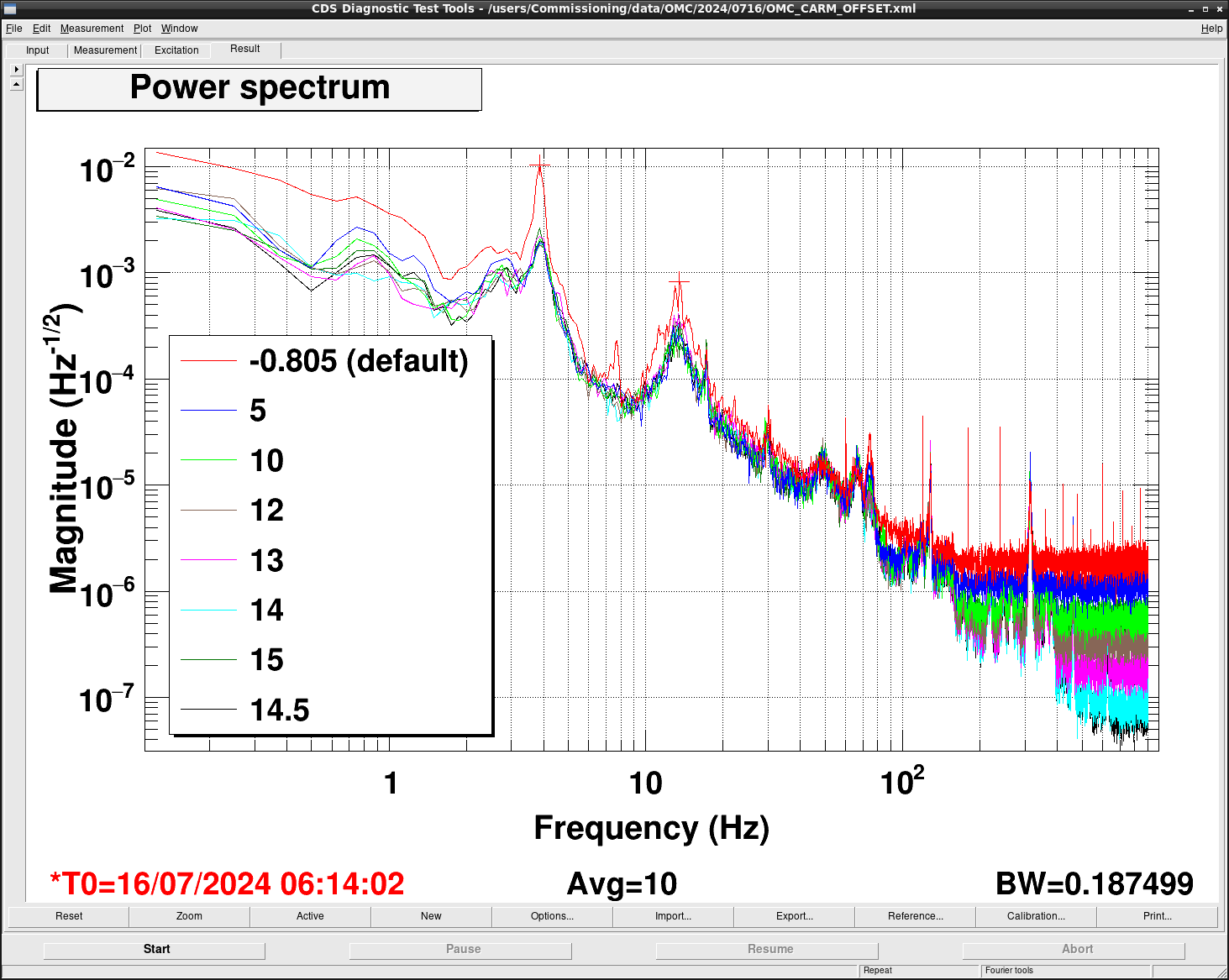
The white noise in OMC TRANS above 200 Hz seems to be introduced by detuning of the cavity. By adjusting the input offset of CARM servo, the white noise was well suppressed. Now we can see many structures below 600 Hz.
Detail
We started OMC commissioning. The first target is to improve the sensitivity reported here, which is limited by some unknown noise floor.
As reported in this log, the noise floor seems to come from some coupling of the control, such as OMC LSC, OMC ASC, CARM, etc. Inspired by this result, we tried changing the locking point of X arm by adding some offset at the input of the CARM servo, then we found that the floor level changes drastically, depending on the offset value, This implies that the locking point of X arm is somehow off resonance due to the residual RFAM.
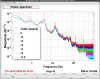
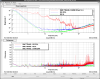
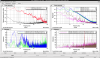
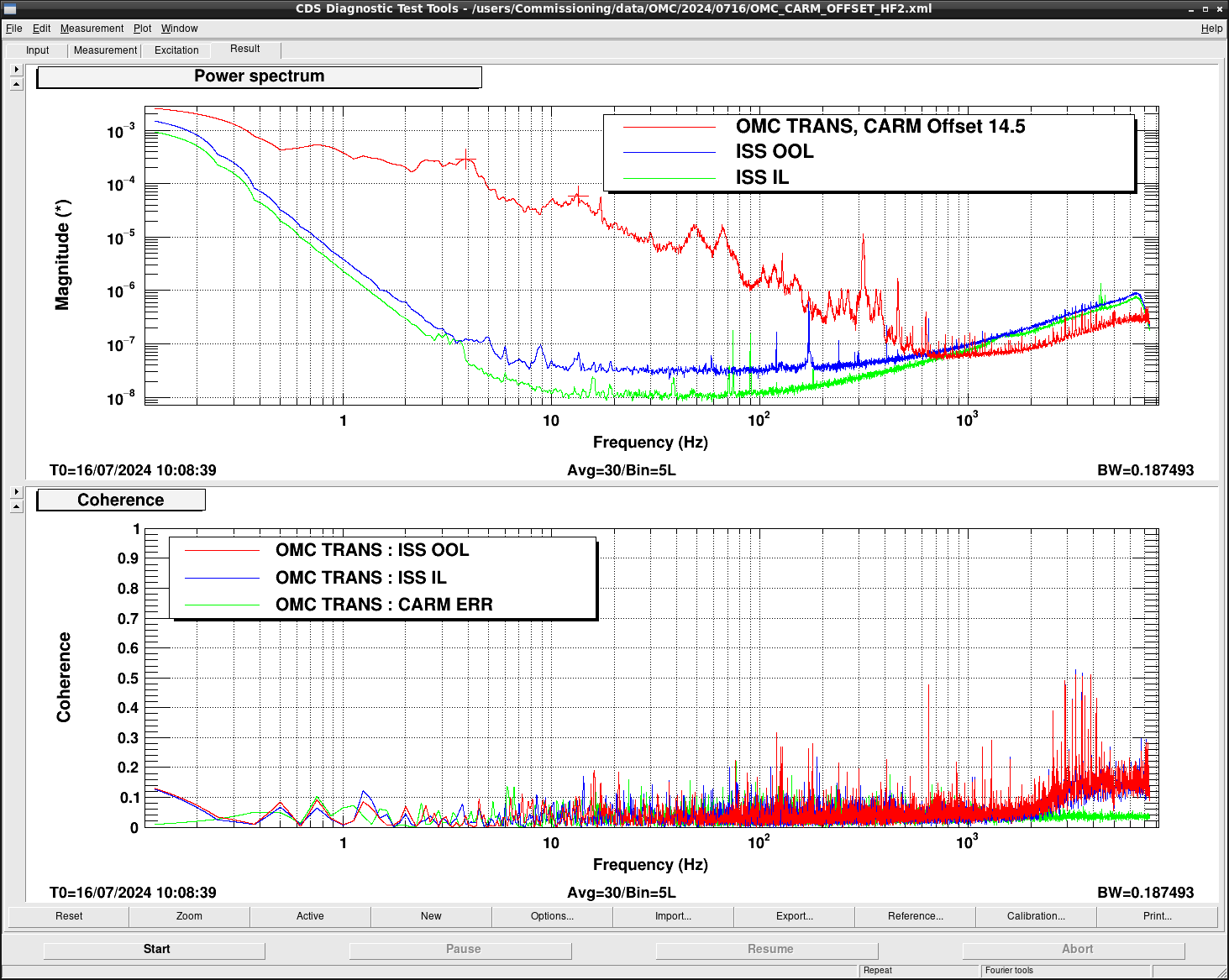
Figure1 shows the spectra of OMC TRANS normalized by DC power of 27.6 mW with various offset in CARM servo. So far the best sensitivity is achieved with the offset of 14.5. Figure2 shows the comparison with ISS out of loop/ in loop signal and the input signal of CARM servo. Above 600 Hz, OMC TRANS signal is better than ISS signal, but we are not sure the reason, Perhaps we missed some filter in OMC TRANS or ISS OOL/IL. Above 2 kHz, we can see a tiny coherence ~ 0.15 between OMC TRANS and ISS signals.
Next
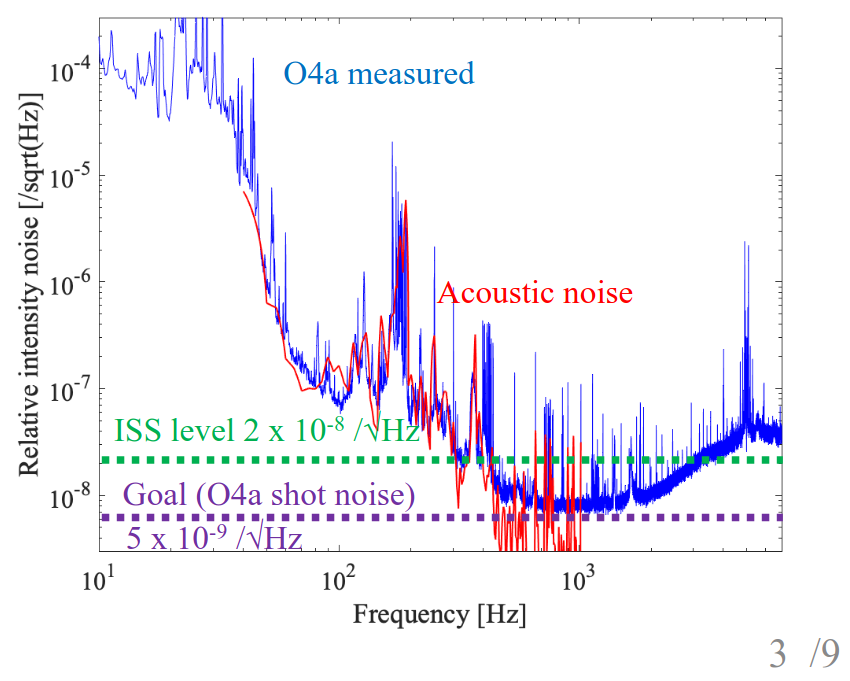
Thanks to the reduction of the white noise, now it is obvious that below 600 Hz there are many structures in OMC TRANS. Comparing with the sensitivity at O4a, the noise level is still higher (for examle, at 100 Hz the current sensitivity is about 10 times larger). It could be that they come from the acoustic coupling. Another candidate is the control noise of the suspensions. We will investigate these possibility by acoustic injection and noise projection of the suspension controls.
{kind=link}
{kind=link}
{kind=link}
{kind=link}