[Kenta, YamaT]
Abstract
Because inconsistency between measurements in recent these days and in the past was able to be explained,
we estimated the actuator efficiencies of BS_TM, ITMX_TM, and ITMY_TM.
There is no inconsistency on the estimated actuator efficiencies with past measurements such as klog#25024.
By the way, because of following issues, we re-measured optical gain and OLTF after the day-time work for this calibration.
1. OLTF in klog#29964 didn't seem to be saved.
When we open the XML file, measured transfer function is quite different from the attachment in klog#29964.
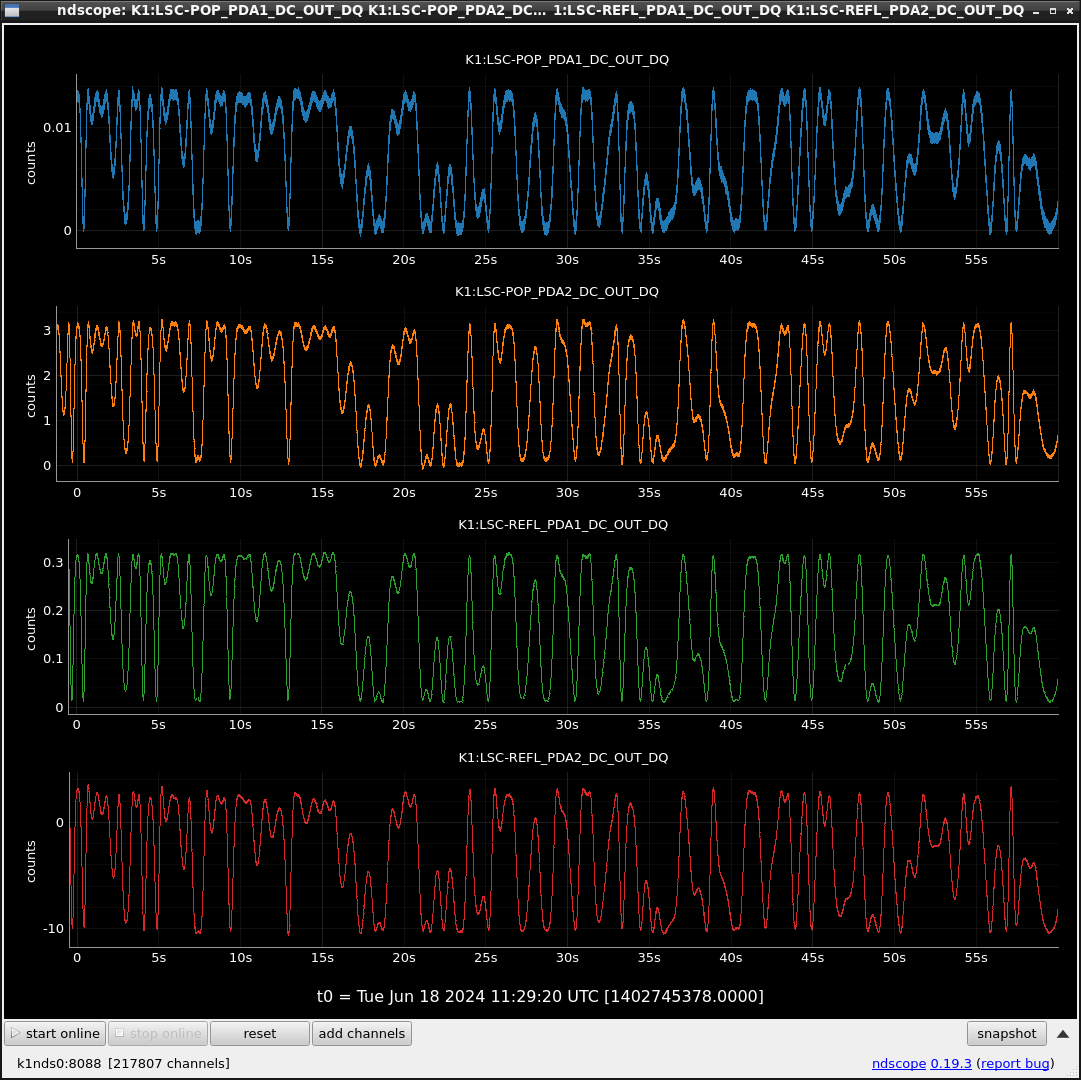
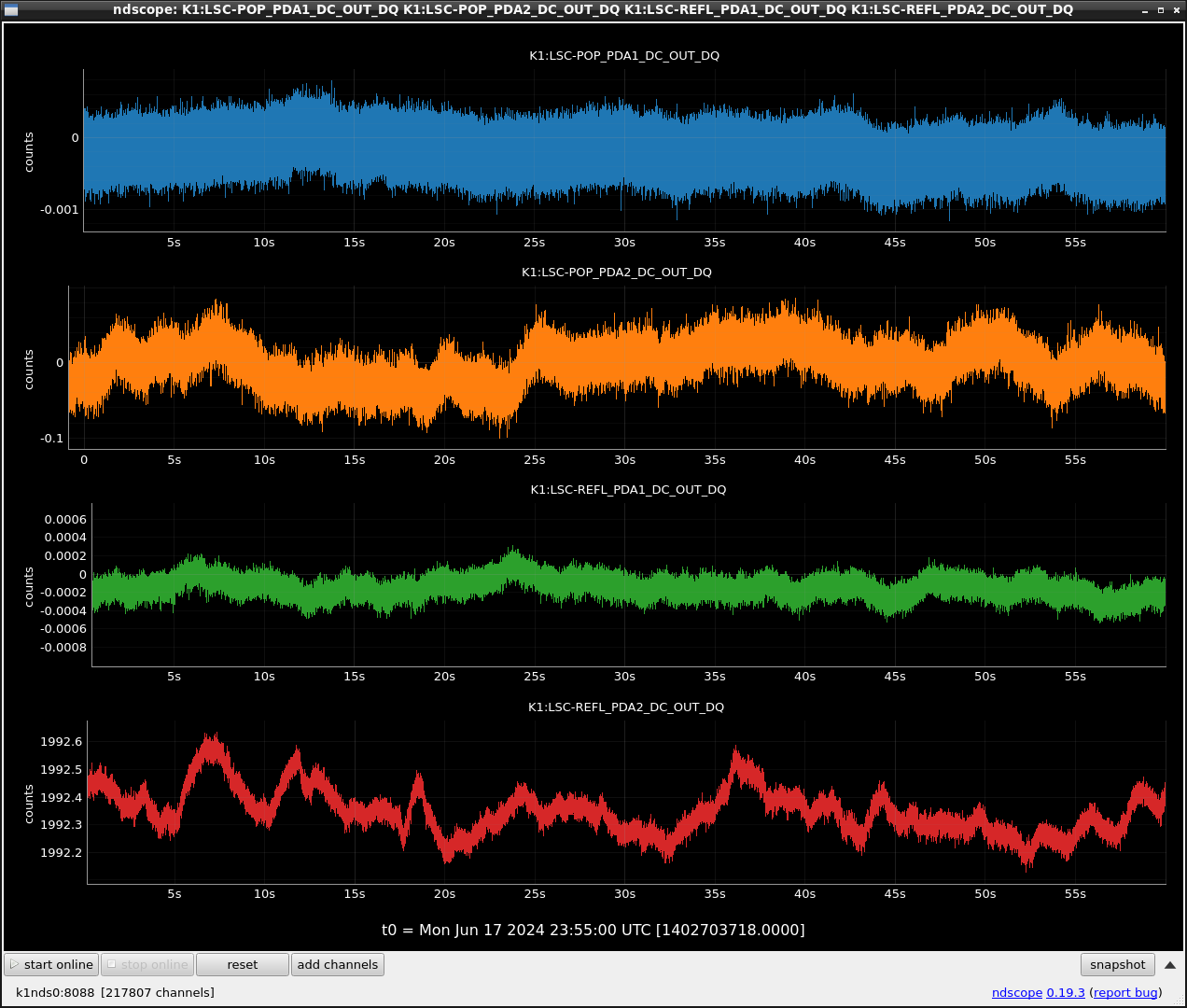
2. Fringes were seen on RFPD signals on measurement time in klog#29964 but VERTEX was in MICH_LOCKED at that time.
So we couldn't confirm correct situation and we decided to re-measure in reliable situation.
Details
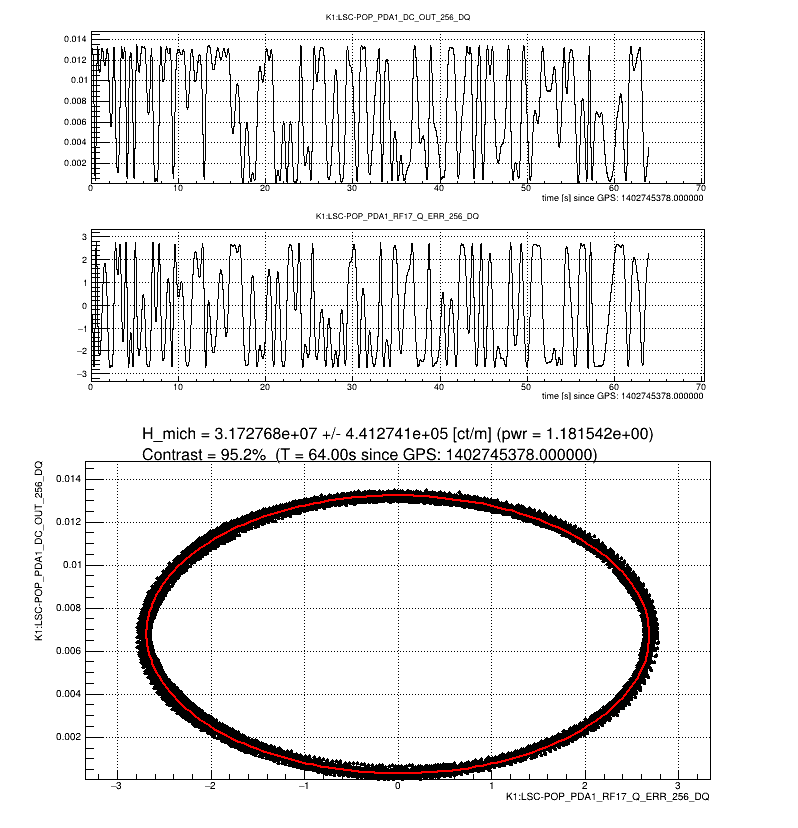
1. Optical gain
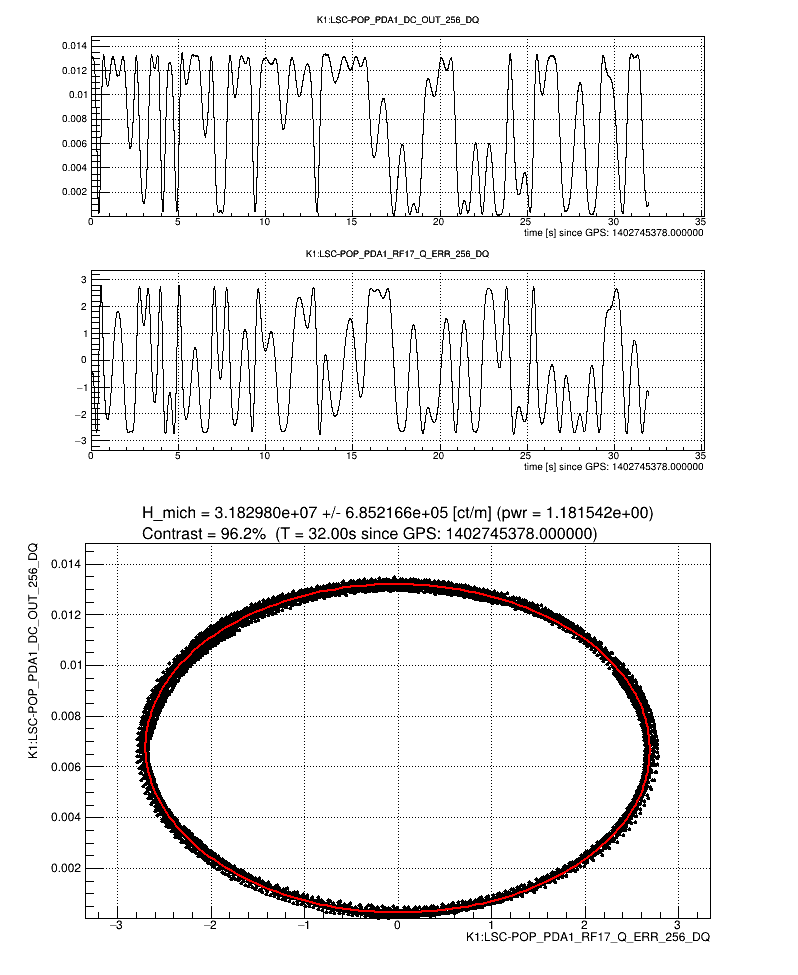
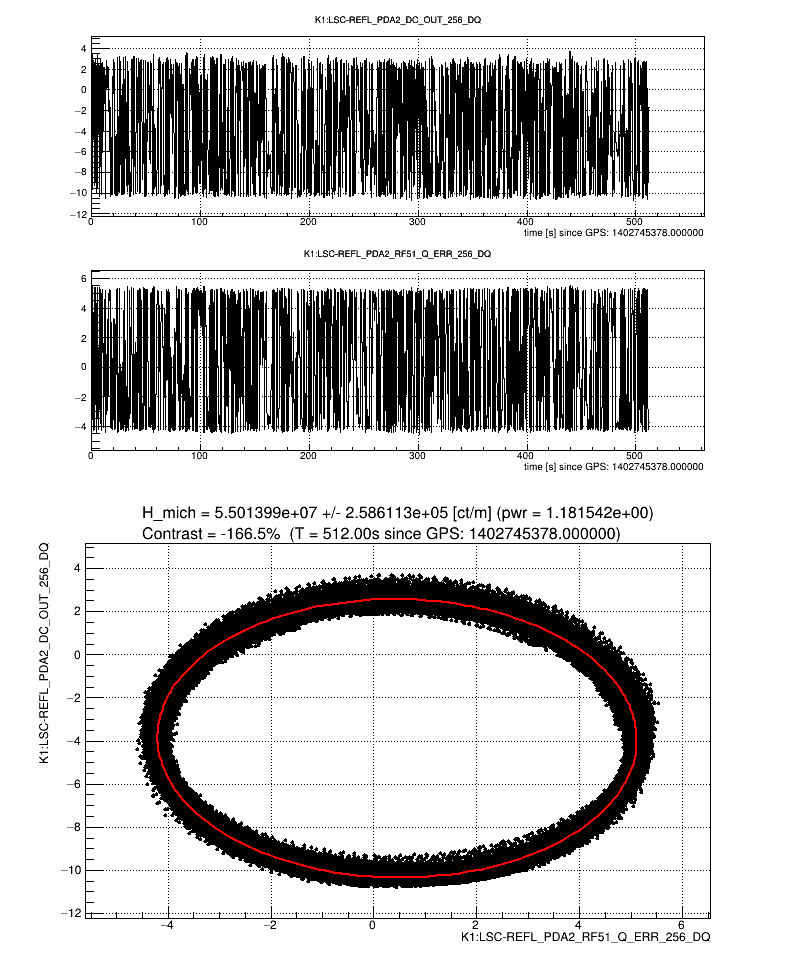
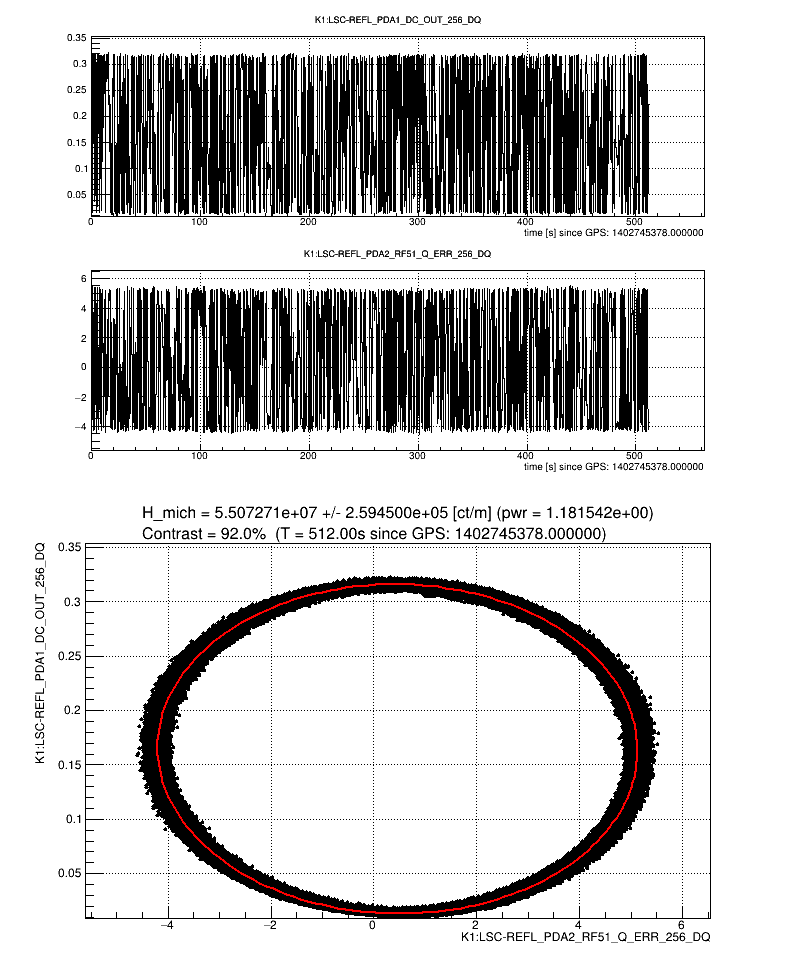
We measured optical gain by the ellipse fitting of Michelson fringes. Used data is from GPS=1402745378 to GPS=1402746018. This is a time just after the OLTF measurement explained in the next section. Because we forgot to request PREF_FM_FOR_MICH, gain difference between MICH and PRMI gain discussed in klog#29958 should be taken into account (sorry for confusing).
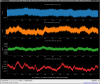
One of fitting results is shown in Fig.1 and others are saved in /users/Commissioning/data/MICH/FSM/2024/0618. Time average of optical gain without gain correction is 3.164e+07 +/- 0.012e+07. And corrected optical gain from displacement to RF17_Q_ERR by a factor of 42.55 is 1.3461e+09 +/- 0.0052e+09. Finally, the actual optical gain from displacement to MICH_IN1 can be estimated by dividing the laser power norm as 1.182 and finally, we obtained actual optical gain as
H_mich = 1.1388e+09 +/- 0.0044e+06 ct/m
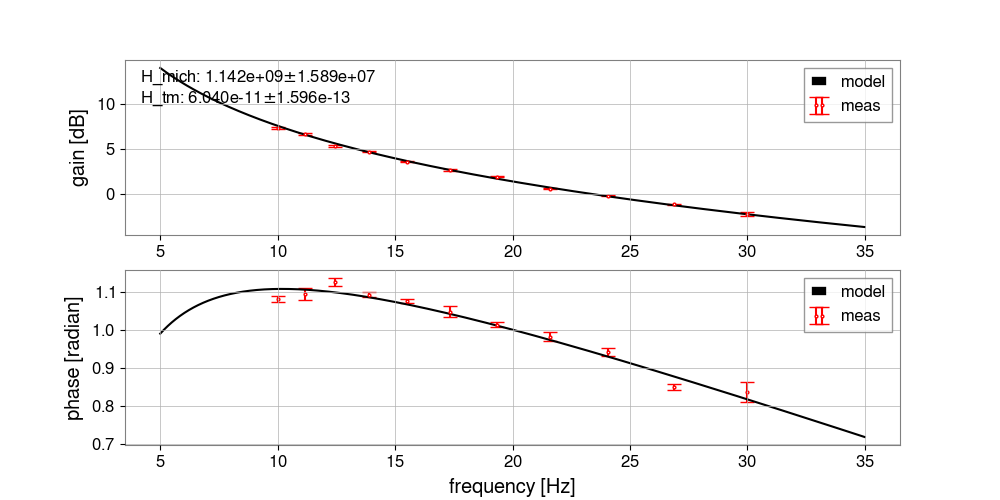
2. Actuator efficiency of BS
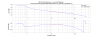
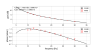
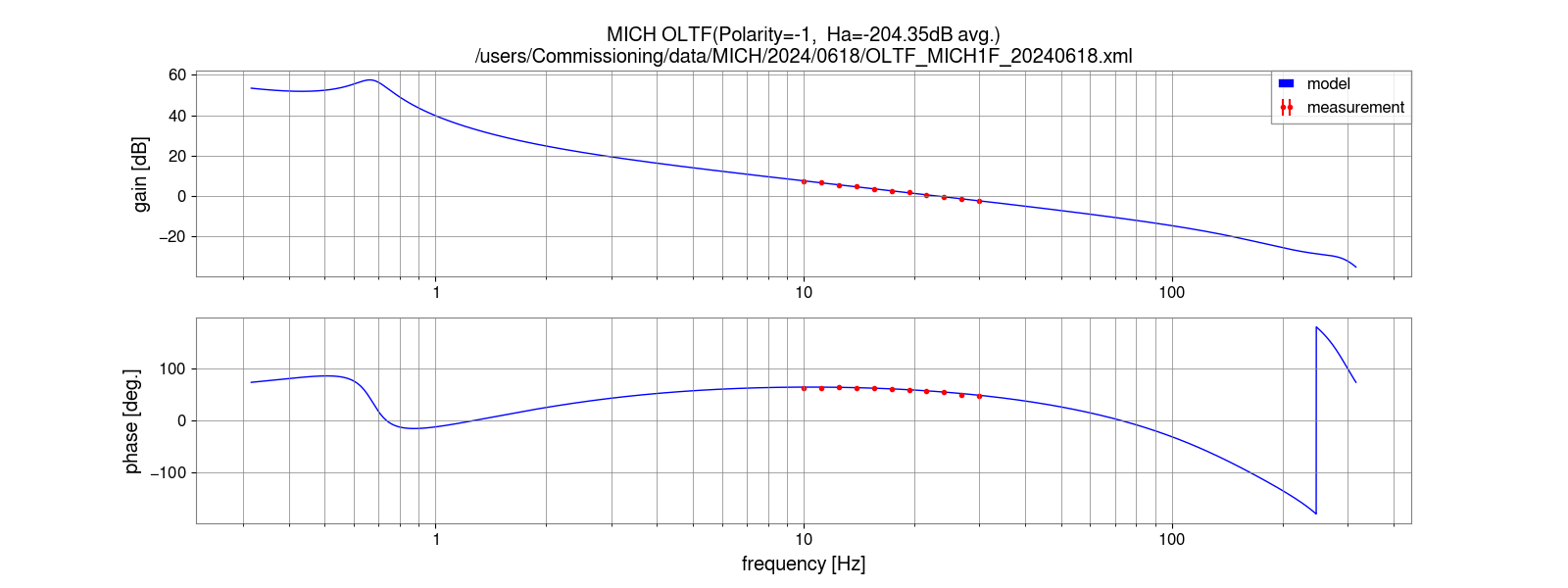
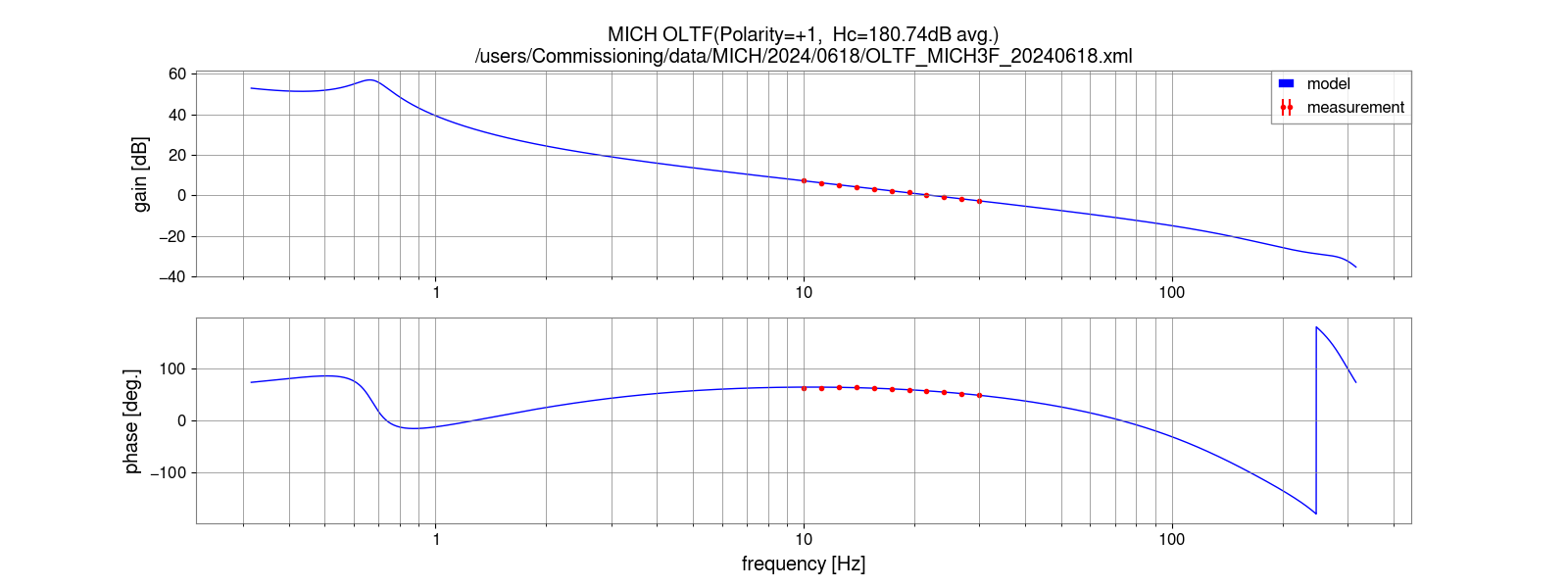
By using the OLTF and estimated optical gain in section 1, we estimated the BS actuator efficiency. Measured transfer function and MICH control model are shown in Fig.2. Best fit of actuator efficiency is as follows
H_bstm = 6.060e-11 +/- 0.042e-11 * (1Hz/f)^2 m/ct
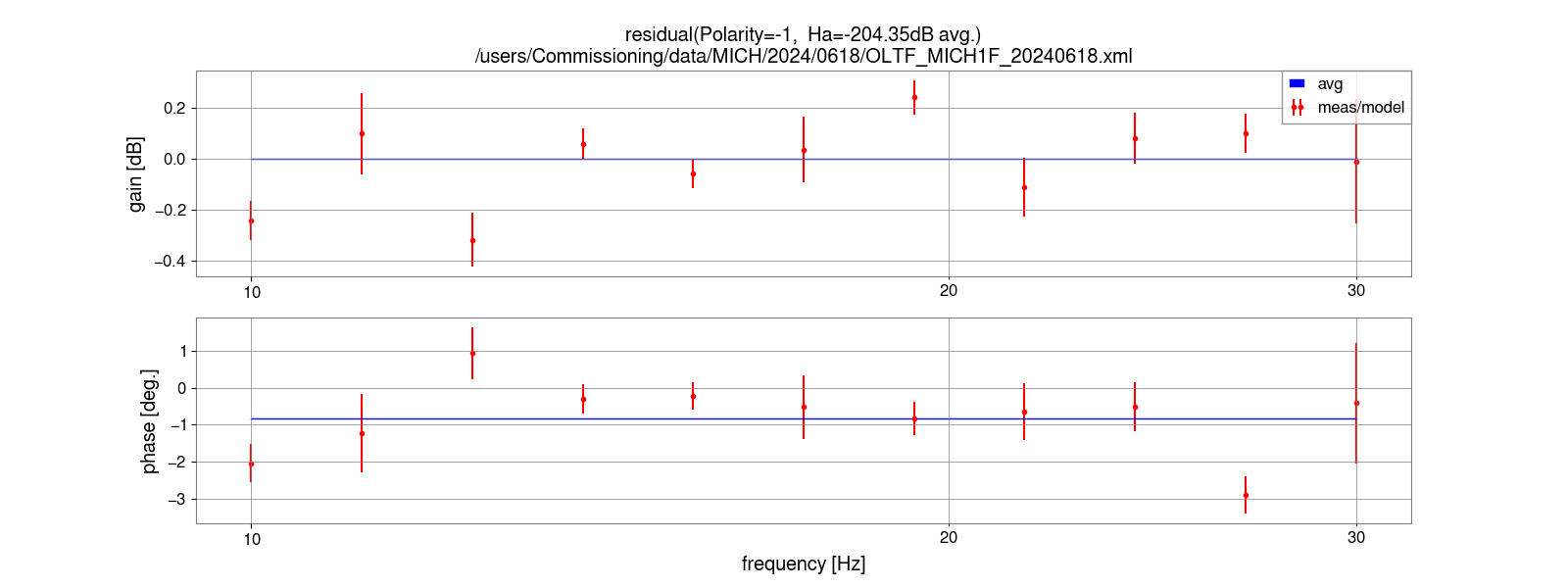
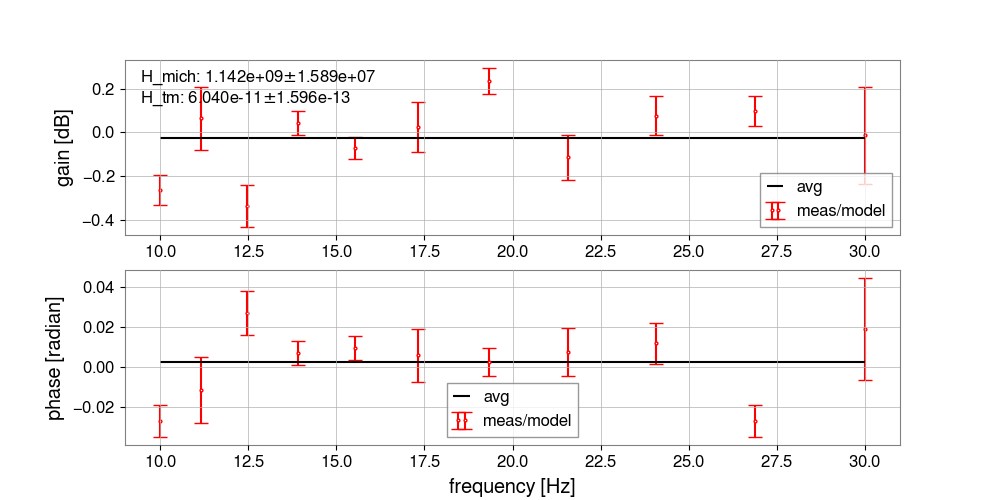
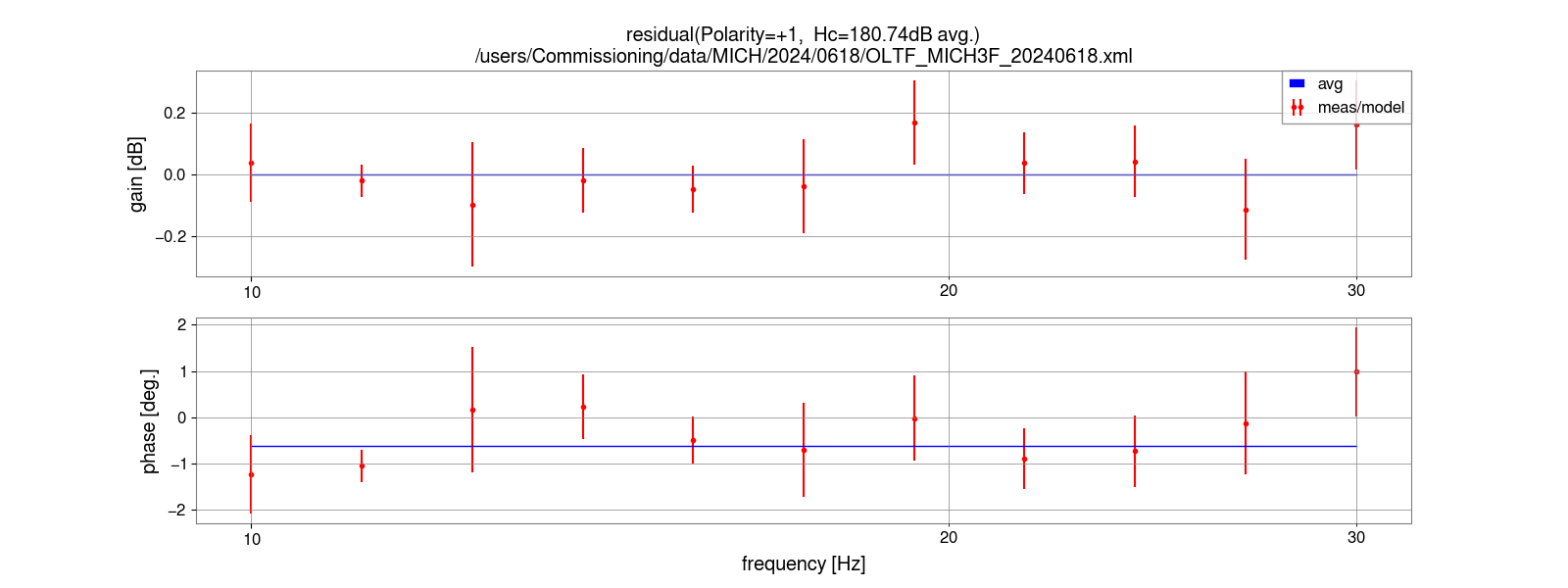
Residual of measured TF and model with this H_bstm is shown in Fig.3. No major discrepancies are seen, so there should be no problem at present. From the view point of the validation of the our model function, it may be better to add measurement point at higher frequencies.
3. Actuator ratio of ITMs and BS
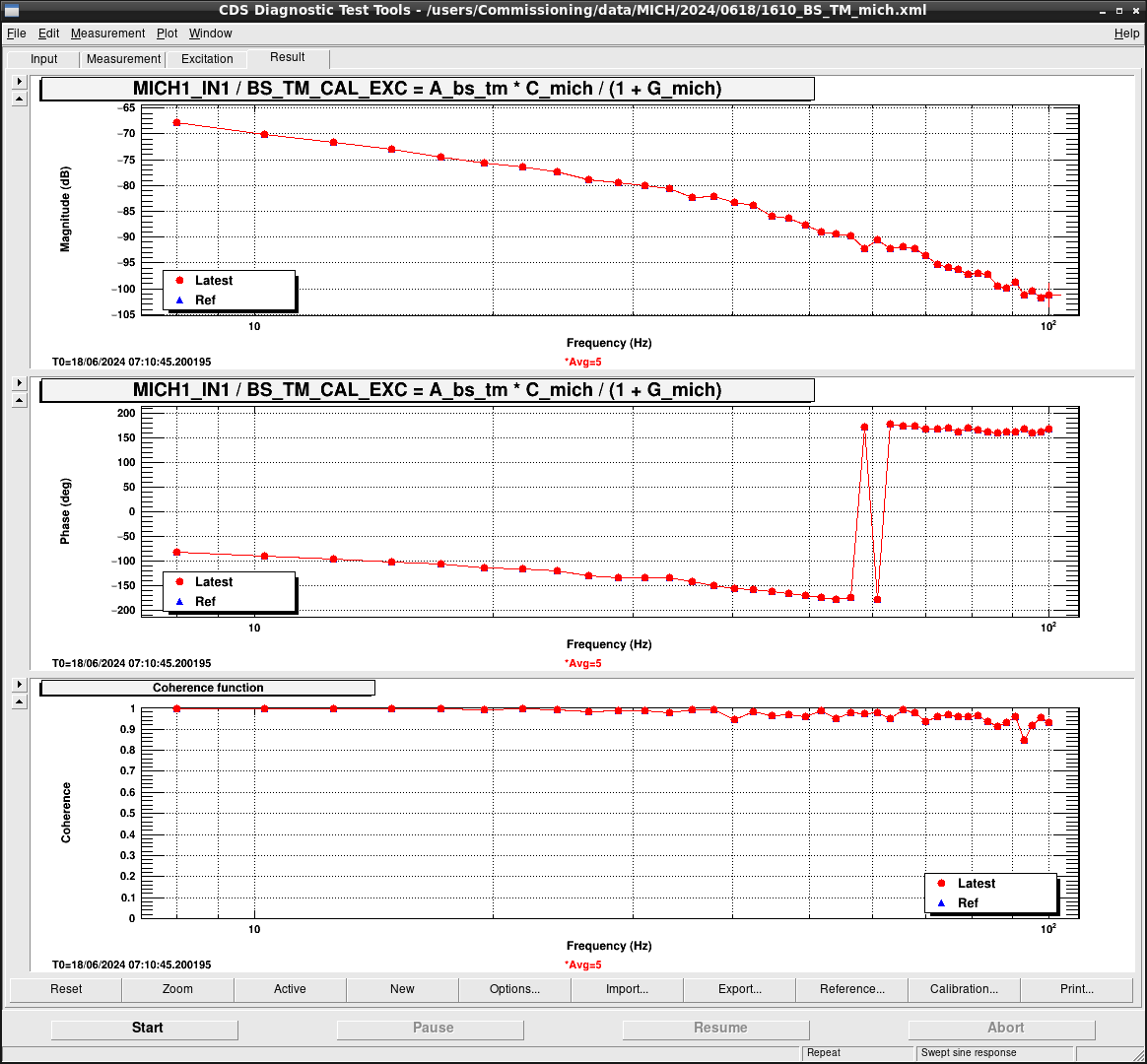
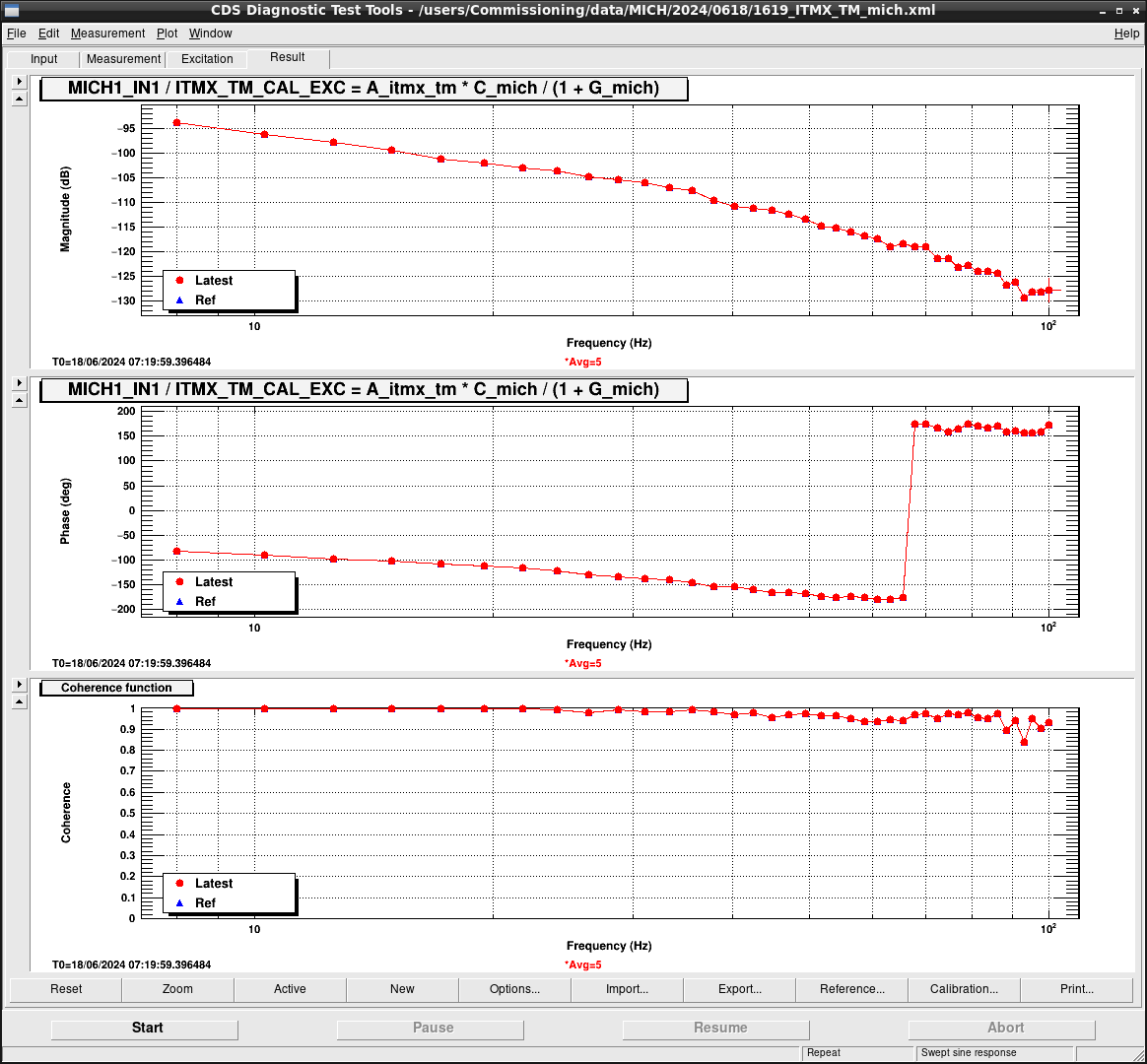
In order to measure the actuator ratio of ITMs and BS, we measured three transfer functions from BS (K1:VIS-BS_TM_CAL_EXC), ITMX (K1:VIS-ITMX_TM_CAL_EXC), and ITMY (K1:VIS-ITMY_TM_CAL_EXC) to the MICH error point (K1:LSC-MICH1_IN1). These transfer functions correspond to
A_$(optic) * C_mich
------------------------
1 + G_mich
So the ratio of two of these transfer functions correspond to the ratio of actuation functions from excitation point to the displacement when we assume that the time drift of the sensing function, C_mich, and open loop transfer functions, G_mich, can be ignored. In addition to this assumption, when we assume that a pendulum response of each optic is almost 1/f^2 in measured frequency region and individual difference of Anti-Imaging filters, and de-whitening filters in the coil drivers are also small enough, the ratio of two measurements correspond to the ratio of actuator efficiencies.
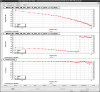
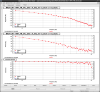
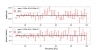
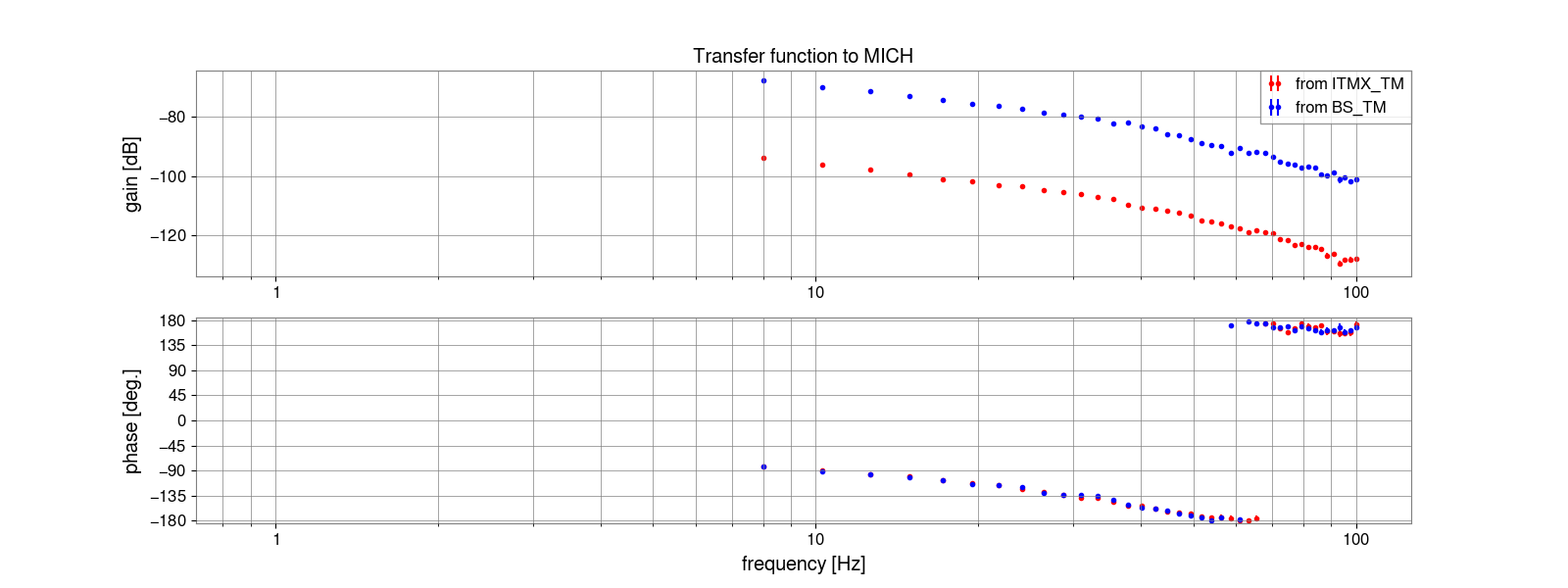
Raw measurement results of from BS, from ITMX, and from ITMY is shown in Fig.4, Fig.5, and Fig.6, respectively. In order to avoid kicking 7.5Hz resonance of Type-A suspensions when swept sine is injected from ITMX and ITMY, injection frequency is chosen above 8Hz. This will be better to re-consider in the future measurements with more complicated IFO configurations such as PRMI. Only phase of the TF from ITMY is 180deg different from another two. So polarity of each actuator seems to be correct. (The overplot of ITMX vs. BS and ITMY vs. BS is also shown in Fig.7 and Fig.8, respectively.)
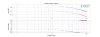
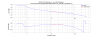
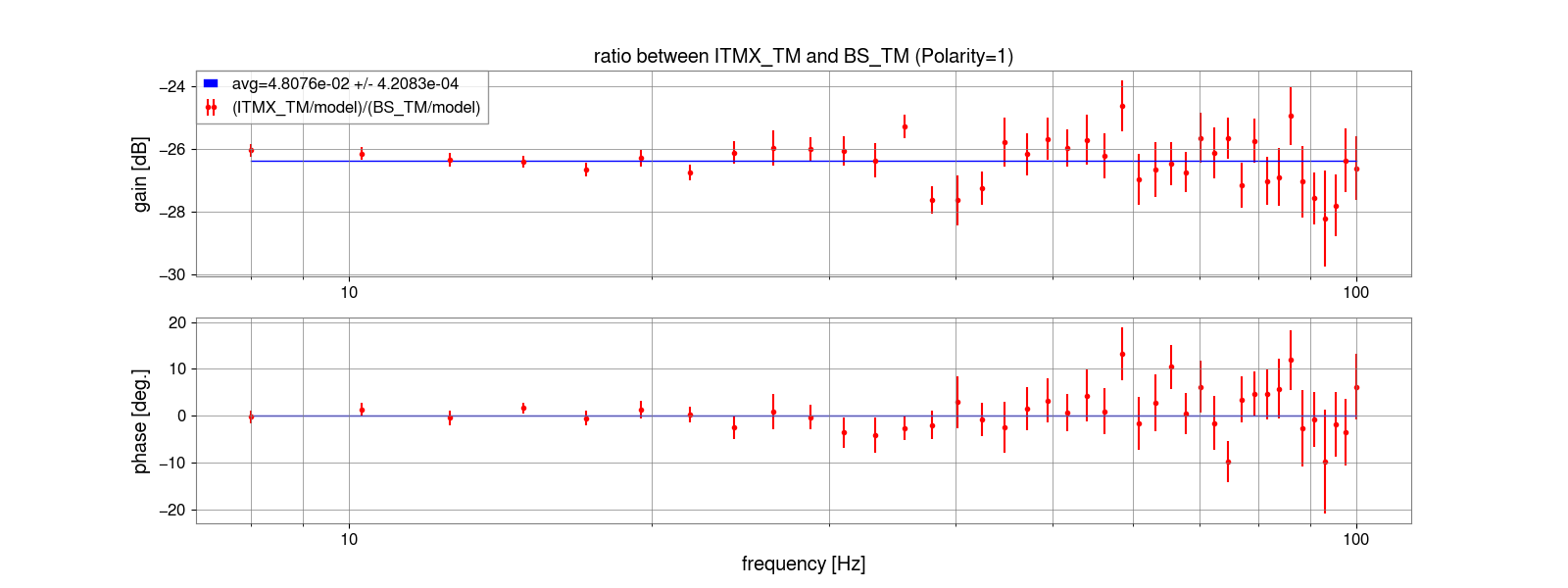
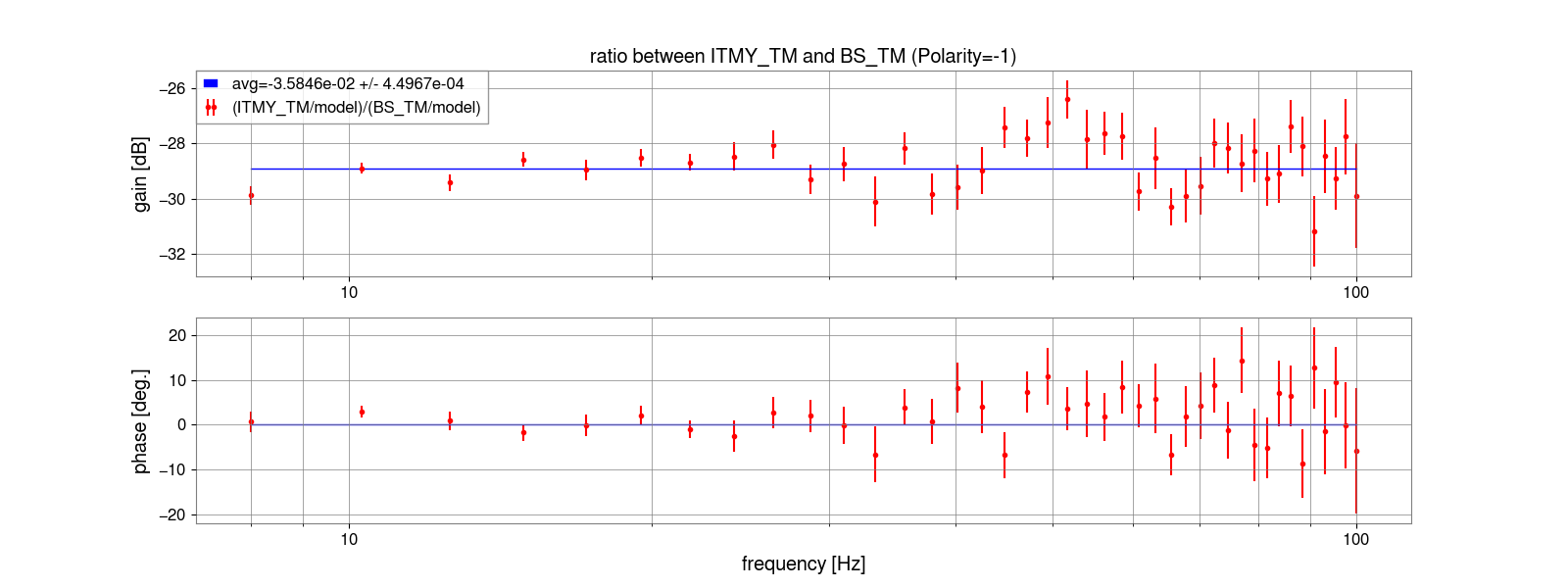
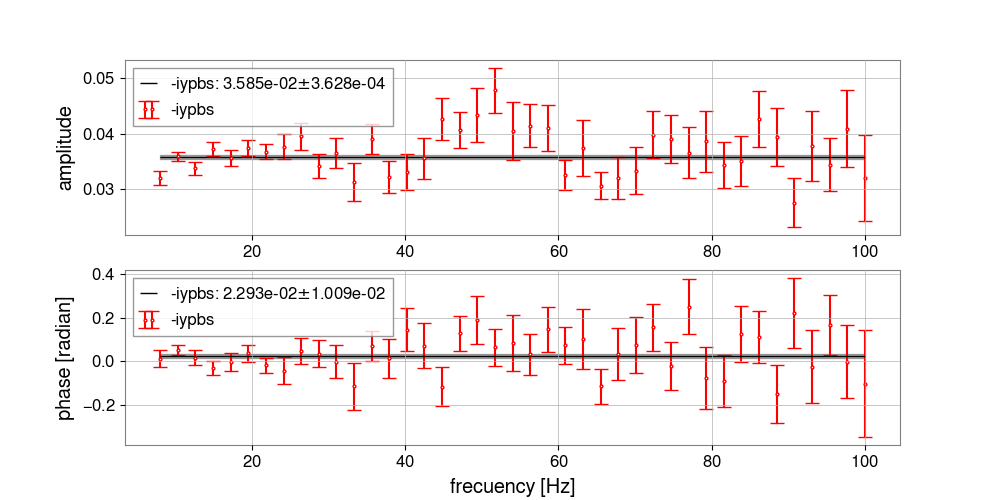
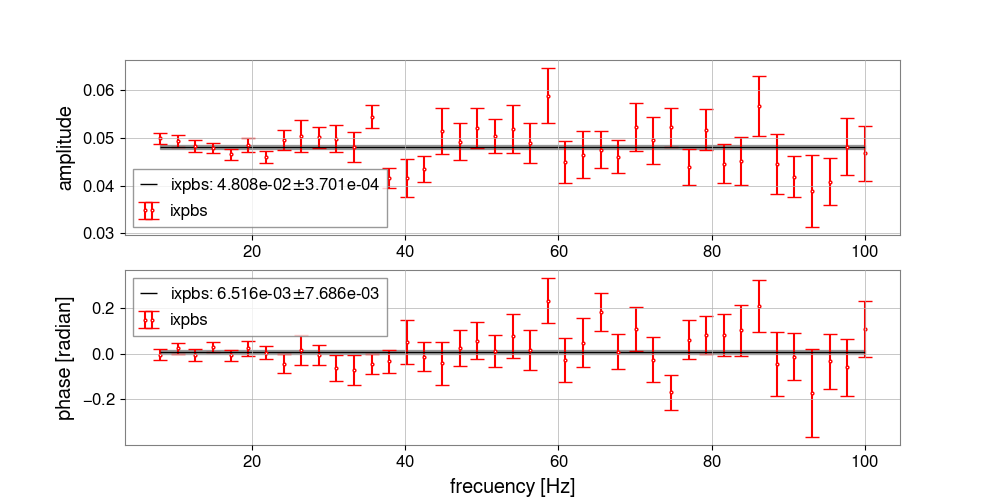
Figure. 9 and figure. 10 shows the ratio of measured TFs from ITMX vs. from BS and from ITMY vs. from BS. Note that, in ITMY case, plot shows -A_ITMY/A_BS instead of +A_ITMY/A_BS for the visibility. From these ratio of two TFs, the ratio of actuator efficiencies computed as follows.
ITMX/BS = 0.04808 +/- 0.00042
ITMY/BS = -0.03585 +/- 0.00045
Finally, we obtained actuator efficiencies of ITMX and ITMY as the multiplication of BS actuator efficiency and these ratio as
A_itmxtm = 2.914e-12 +/- 0.032e-12 * (10Hz/f)^2
A_itmytm = -2.173e-12 +/- 0.031e-12 * (10Hz/f)^2.
Note that TypeA suspension model is normalized at 10 Hz for convenience in on-line calibration.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}