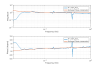
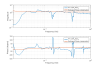
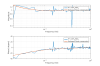
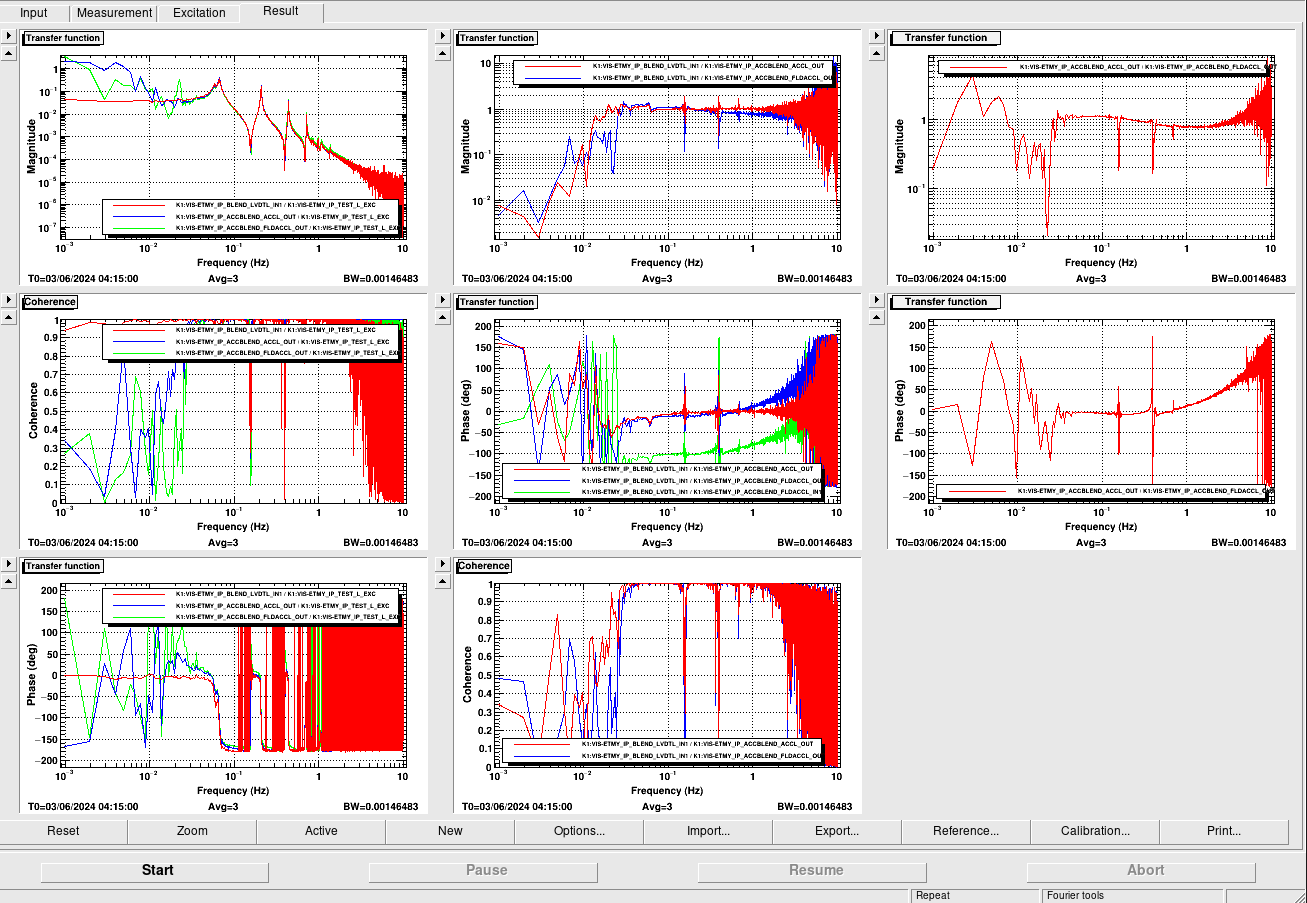
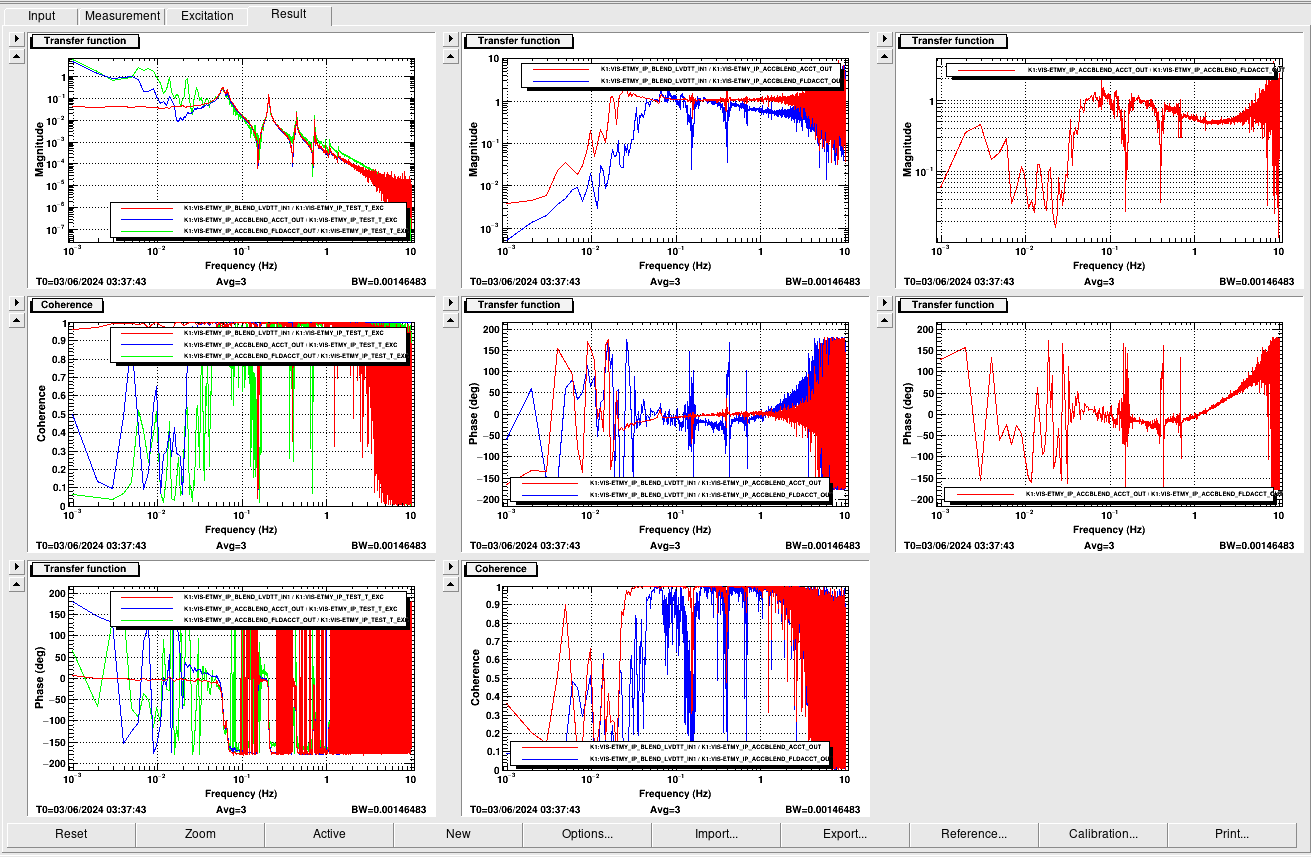
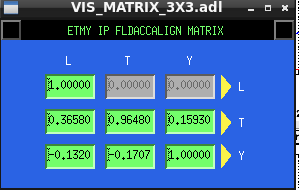
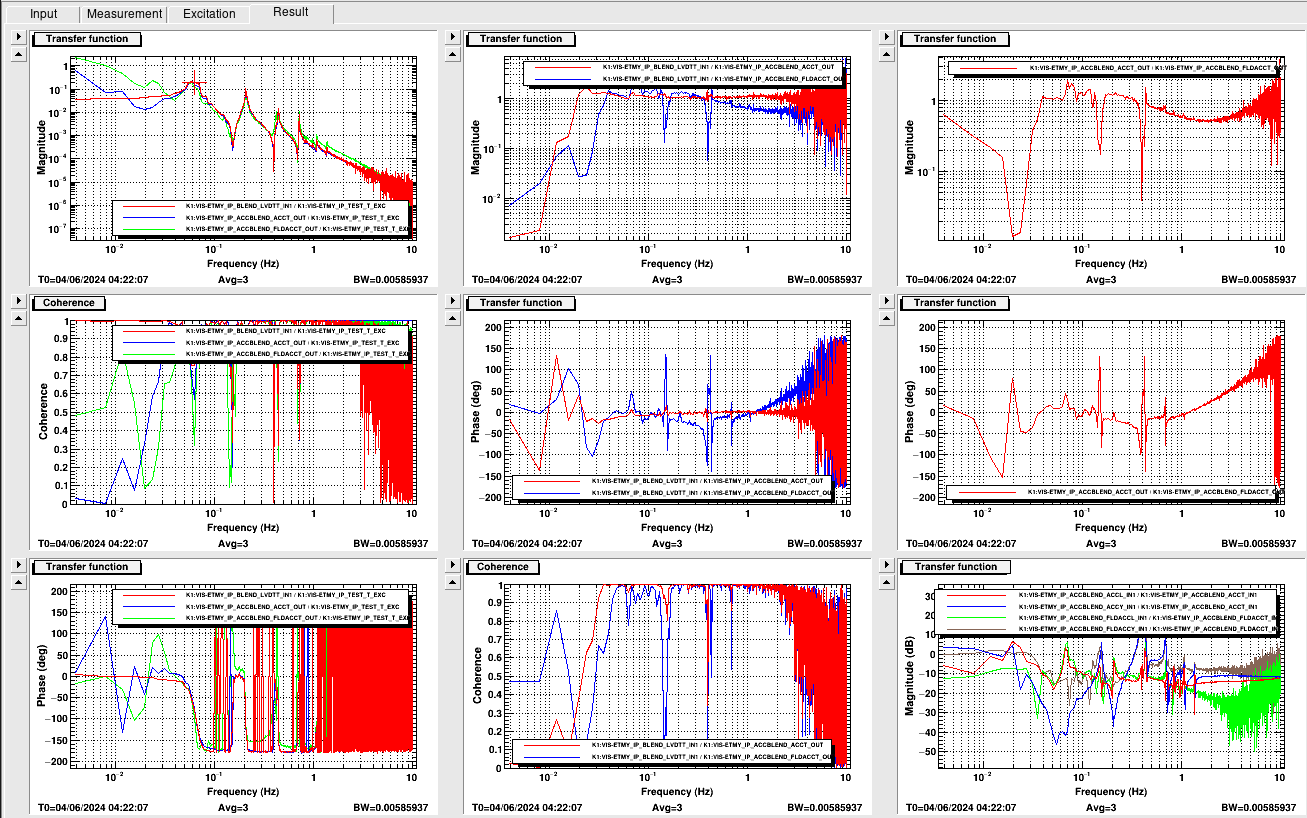
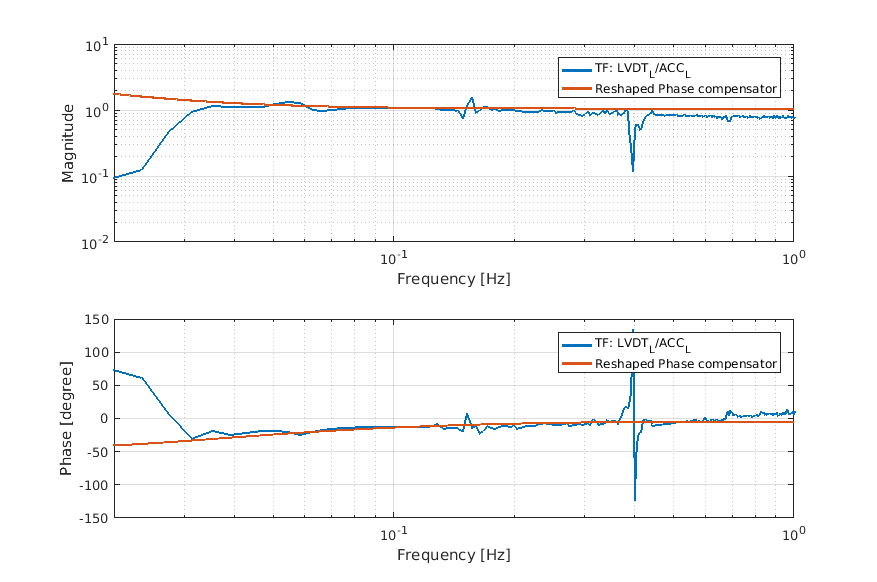
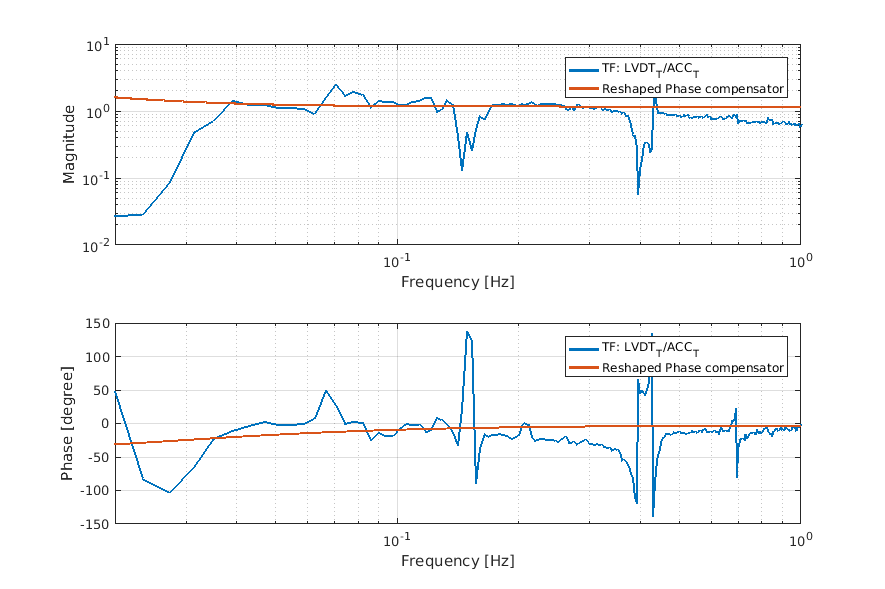
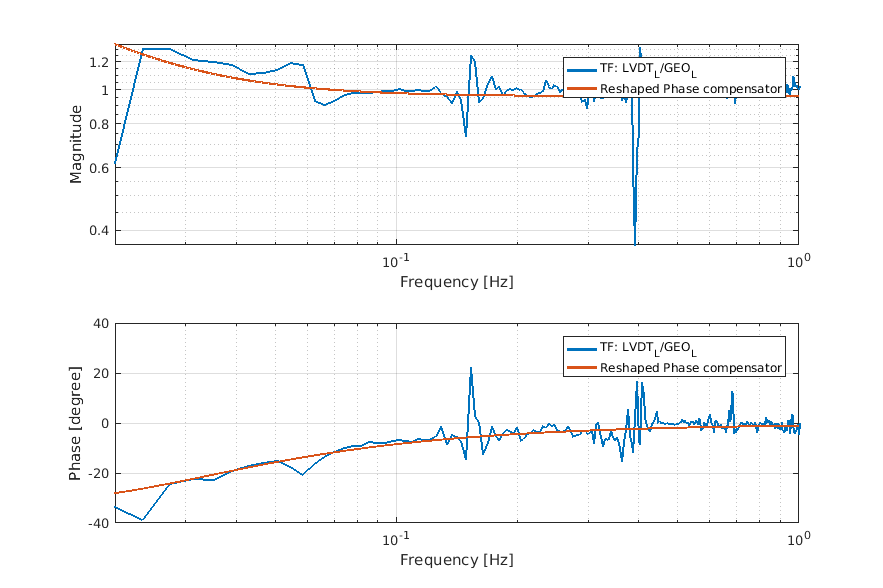
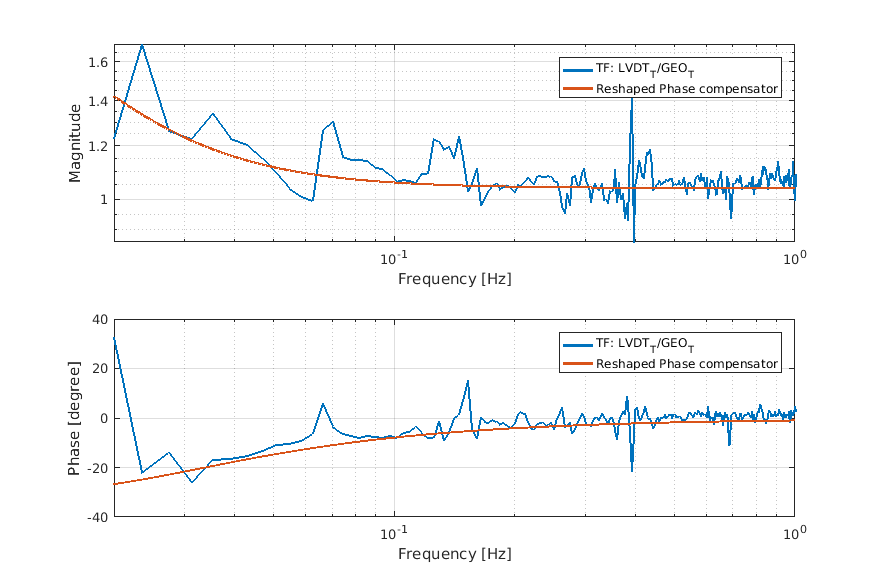
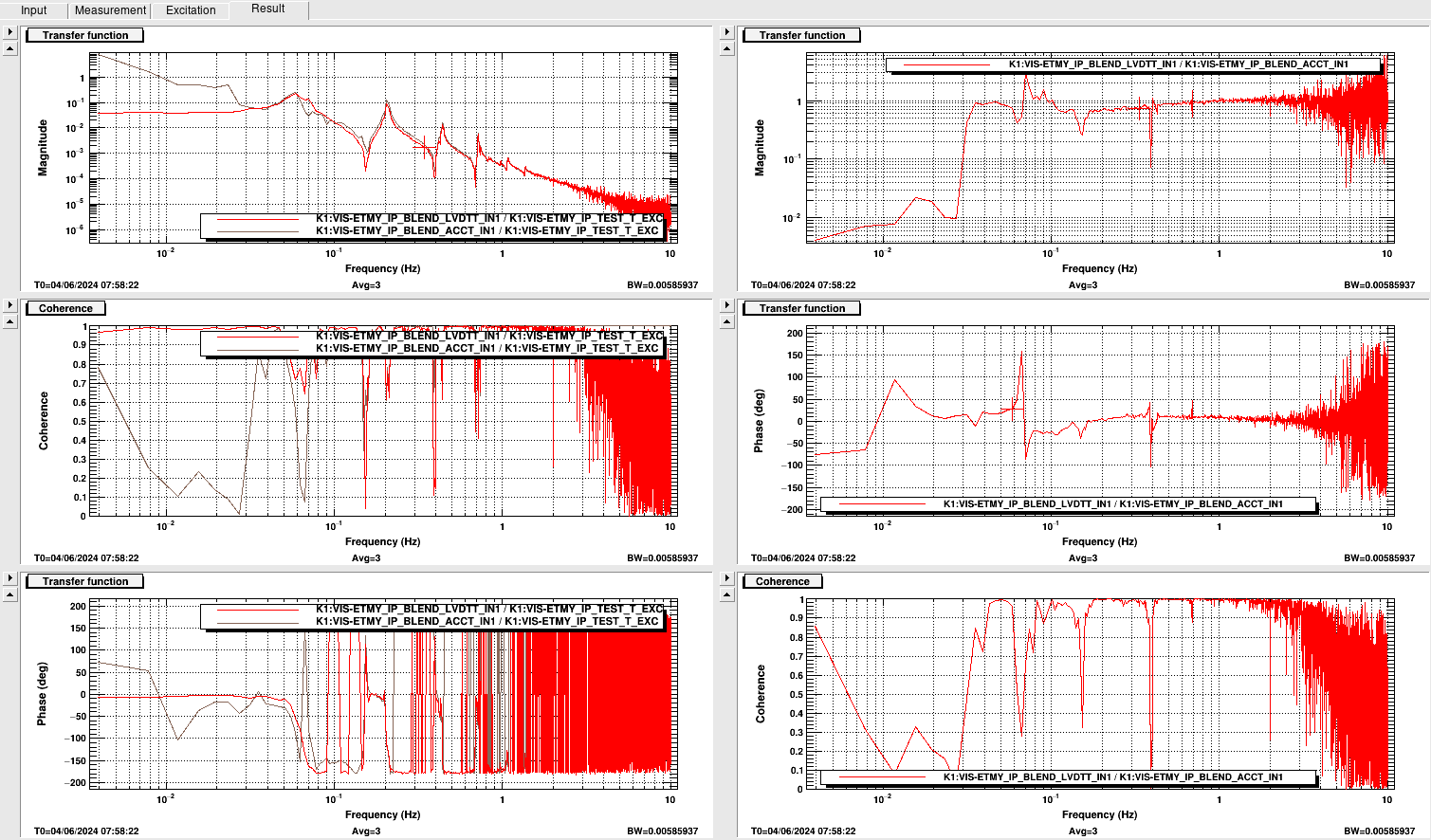
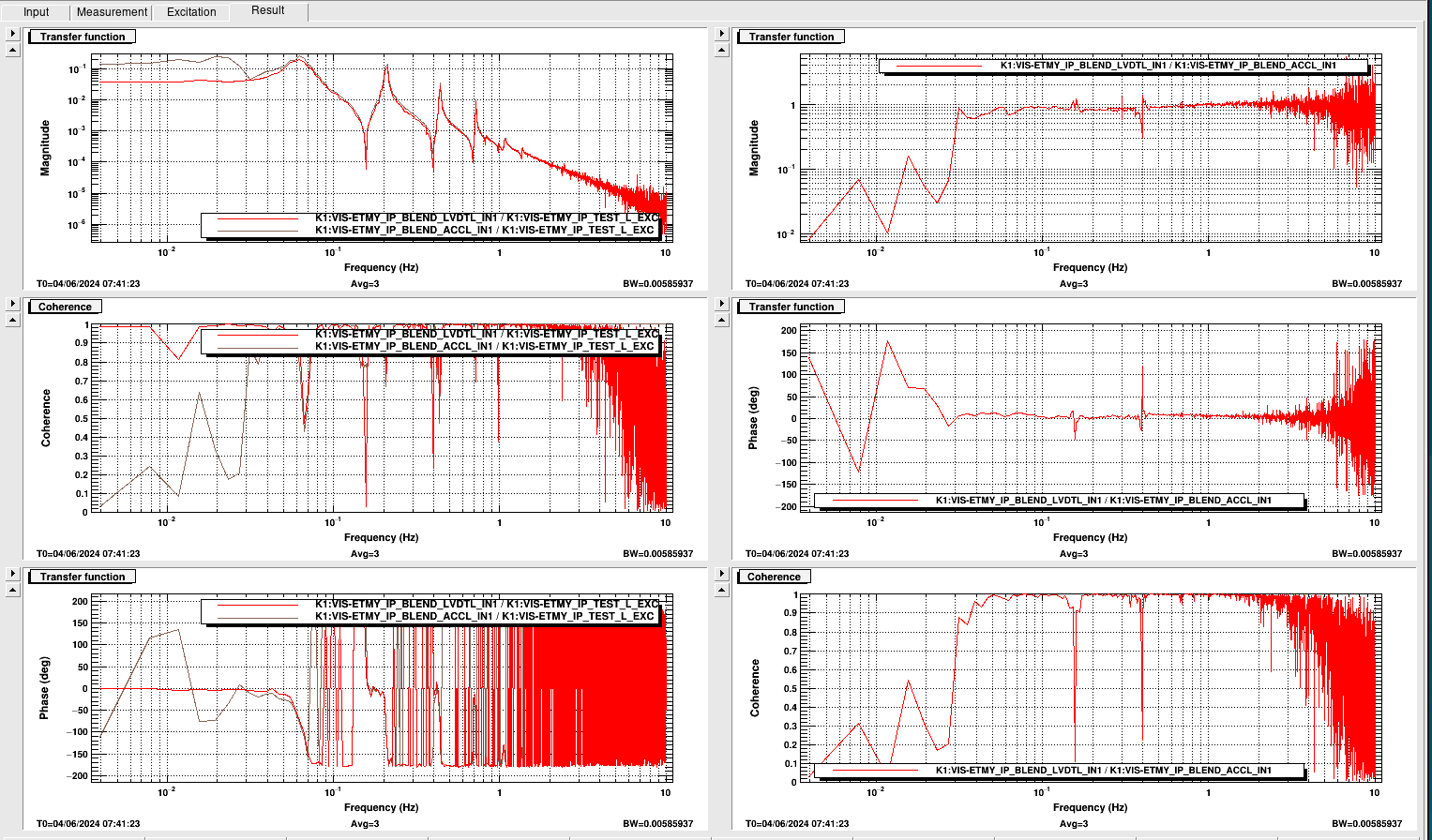
I continued the preliminary work to put in operation the IP inertial controls. I measured all the TFs: GEO/LVDT ACC/LVDT, IS/LVDT to measure the phase gap below 0.1 Hz and shape the phase compensators as done for the others TypeA IP. The TF along L was fine (see pic 1); the coherence was good and also the GEO/LVDT and ACC/LVDT were fine. Otherwise, for the T d.o.f. Looking at Pic 2, the TF ACC/LVDT (blue line) is noisy. This could be due to residual sensing coupling. As previously said, it is difficult to disentangle L and T. Nevertheless, I did another trial. I added the matrix from Pic 3 to MEDM and measured again the TF: ACC__{L,T}/LVDT_{L,T} and TF: GEO__{L,T}/LVDT_{L,T} again. Along L the TF is the same as before, but along T it is better (Pic4). This matrix seems to help decouple L and T. Then I tried to shape the phase compensators. I added these filters to MEDM as Ph_C and tested them. At this point I built the inertial sensors IS_{L,T} and measured the TF: IS{L,T}/LVDT_{L,T}. The TF along L looks fine (Pic10). The TF along T still has a phase jump around 0.06 Hz (see Pic 9). I don't know why. I need to investigate more.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}