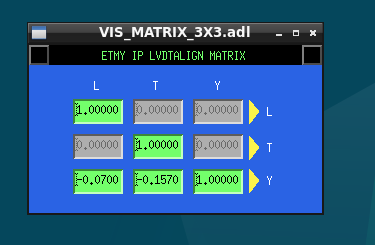
Today I started the preliminary work to implement the inertial control in the IP stage. I started by checking the diagonalisation of the LVDT and actuators. While shaking the IP, I noticed that there was a LVDT sensor coupling. So I decided to try and better decouple the sensing by measuring the decoupling matrix. I measured the TFs along L, T and Y and measured the value of the coupling TFs L_{T,Y}/L_L to the IP resonance along L, LVDT_{L,Y}/LVDT_T , the IP resonance along T and LVDT_{L,T}/LVDT_Y to the IP resonance along Y to calculate the new matrices of S_L. Unfortunately the IP mode along L and T is almost the same and the matrix I found does not make sense. I decided to keep the old matrix.
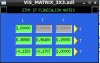
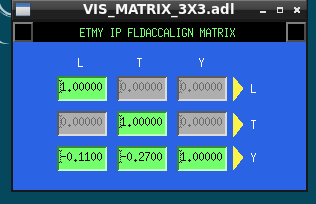
I then checked that the actuators were correctly diagonalised by moving the inverted pendulum in DC. I found some residual coupling and decided to change the ACT_ALIGN matrix (D). I decided to decouple the actuation by measuring the decoupling matrix pushing the IP in DC. Here the new matrix I found:
D_new=
| 0.9879 | -0.2508 | -0.0625 |
| -0.0786 | 0.9672 | -0.1394 |
| -0.0765 | 0.1148 | 1.0002 |
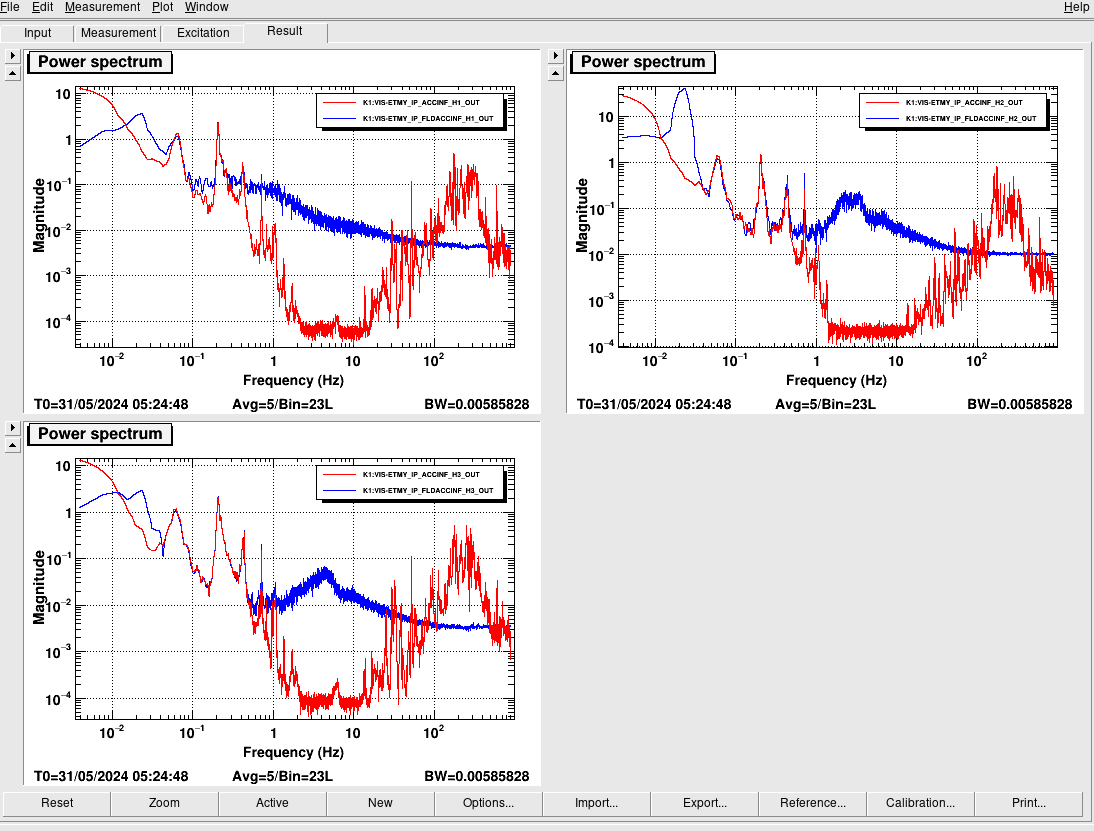
I tested the new matrix and it worked fine. Before starting the diagonalisation of the inertial sensors (ACC and GEO), I intercalibrate the accelerometer signals ACC_{H1,H2,H3} to the geophone GEO_{H1,H2,H3} by measuring the ratio of the spectra GEO_{H1} /ACC_{H1} GEO_{H2} /ACC_{H2},GEO_{H2} /ACC_{H2} at frequency 0.207 Hz. The estimated calibration factors are: cal_H1=0.1482; cal_H2=0.3287; cal_H3=0.1616.
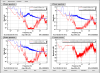
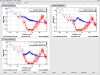
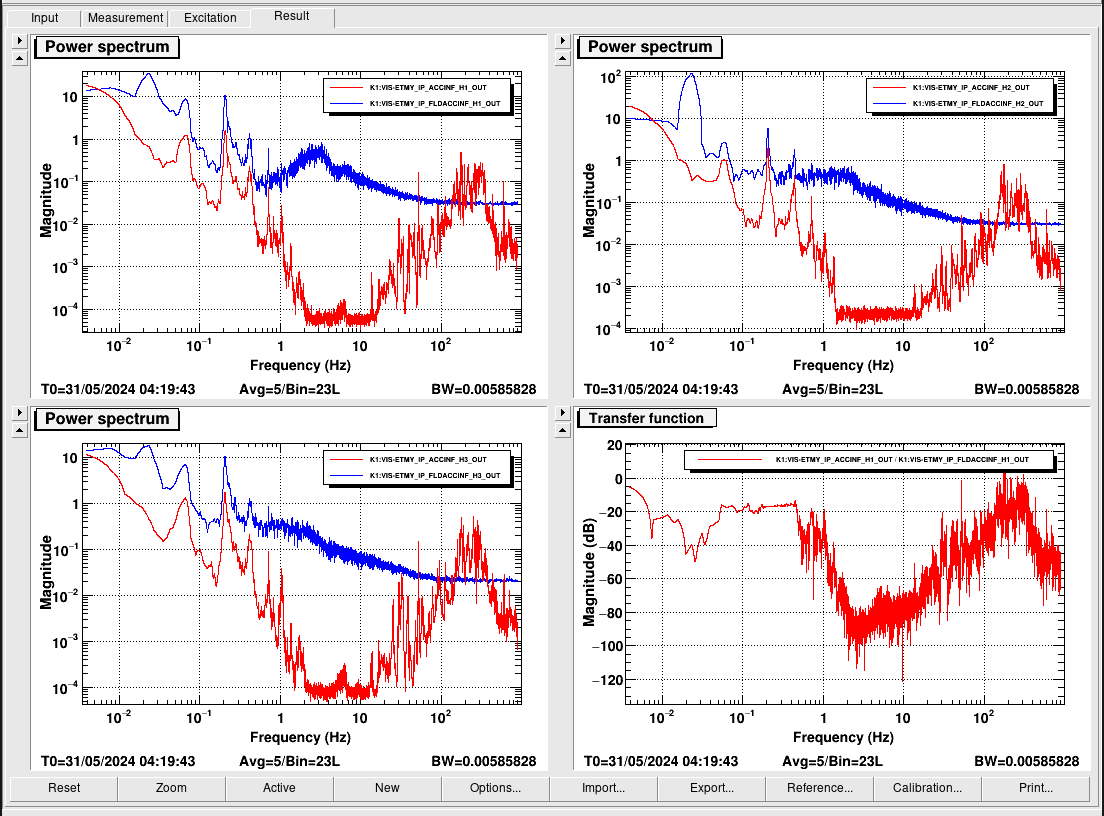
I implemented these numbers in the MEDM and took the spectra of the geophones and accelerometers. Figure 1 and Figure 2 show the spectra of the geophones and accelerometers before and after calibration. It seems that the signals are calibrated.
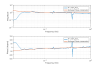
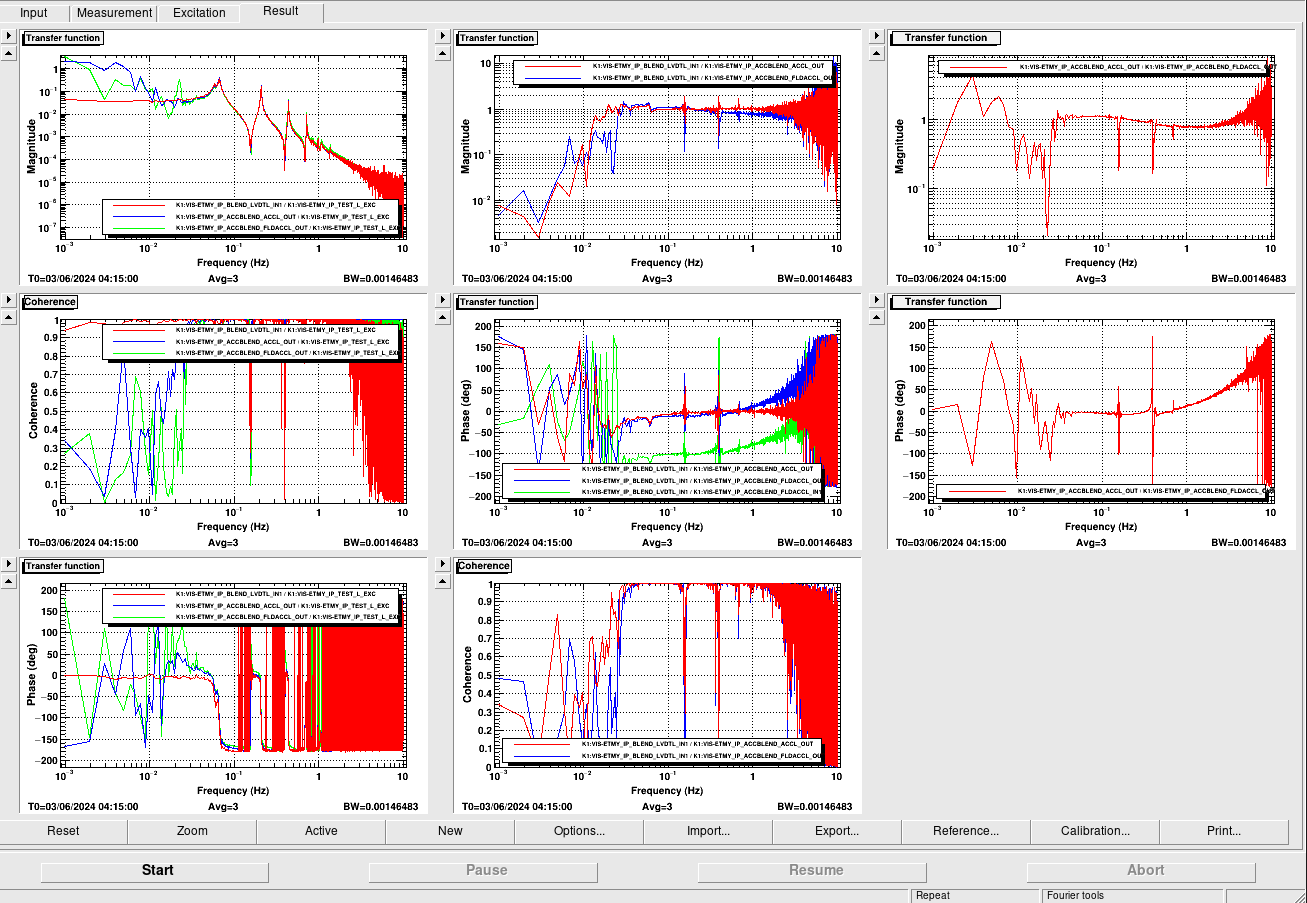
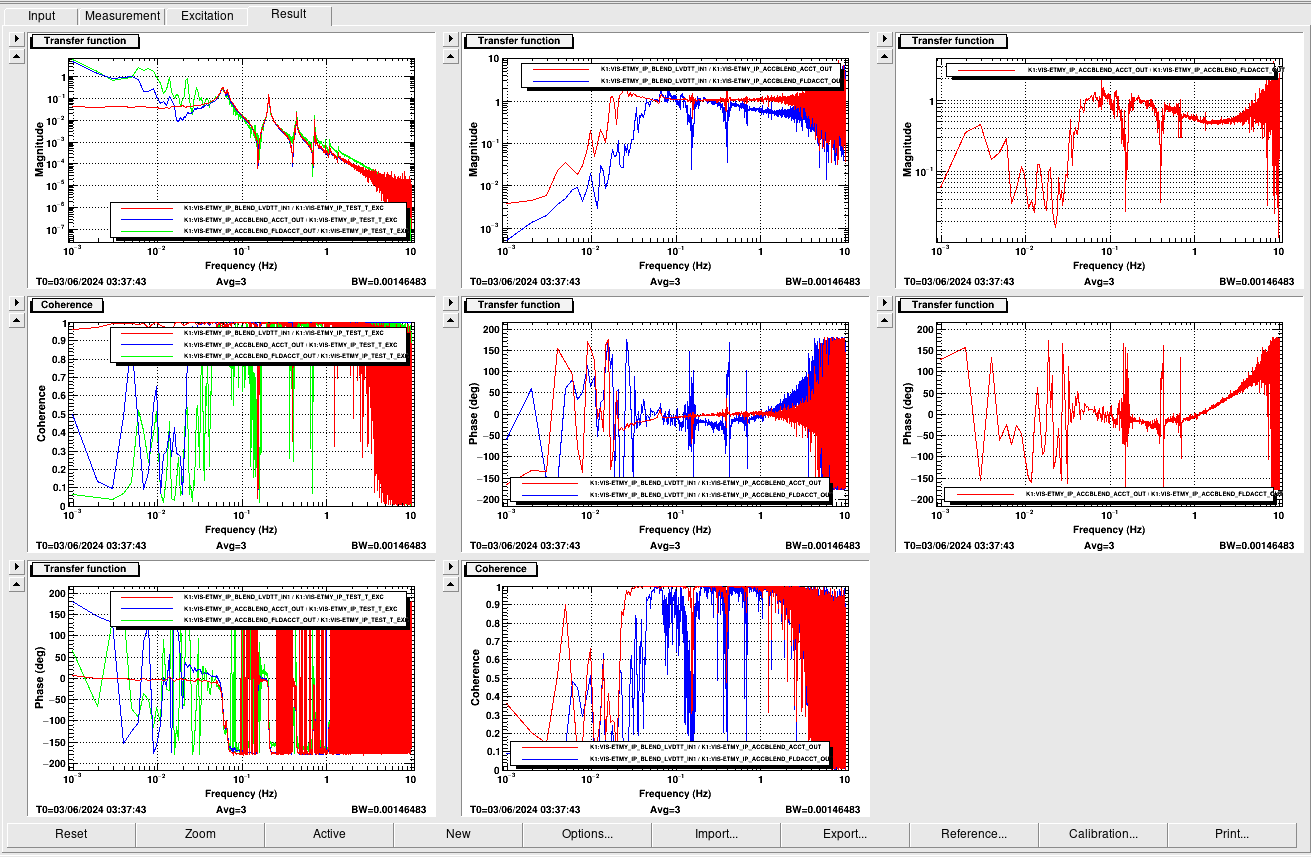
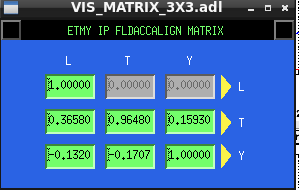
At this point I measured the TFs along L, T and Y and measured the value of the coupling TFs ACC_{T,Y}/ACC_L ,GEO_{T,Y}/GEO_L at the IP resonance along L, ACC_{L,Y}/ACC_T , GEO_{L,Y}/GEO_L at the IP resonance along T and ACC_{L,T}/ACC_Y , GEO_{L,T}/GEO_Y at the IP resonance along Y to calculate the new matrices of S_G and S_A. Also for the inertial sensors, I found it difficult to decouple L2T and T2L due to the degeneration of the IP mode along La and T. I decided to keep only the row of the matrix related to the degree of freedom Y.
S_A = [ 1 0 0; 0 1 0; -0.1320 -0.1707 0.9718]
S_G=[1 0 0 ; 0 1 0 ; -0.0768 -0.1866 1.0142]
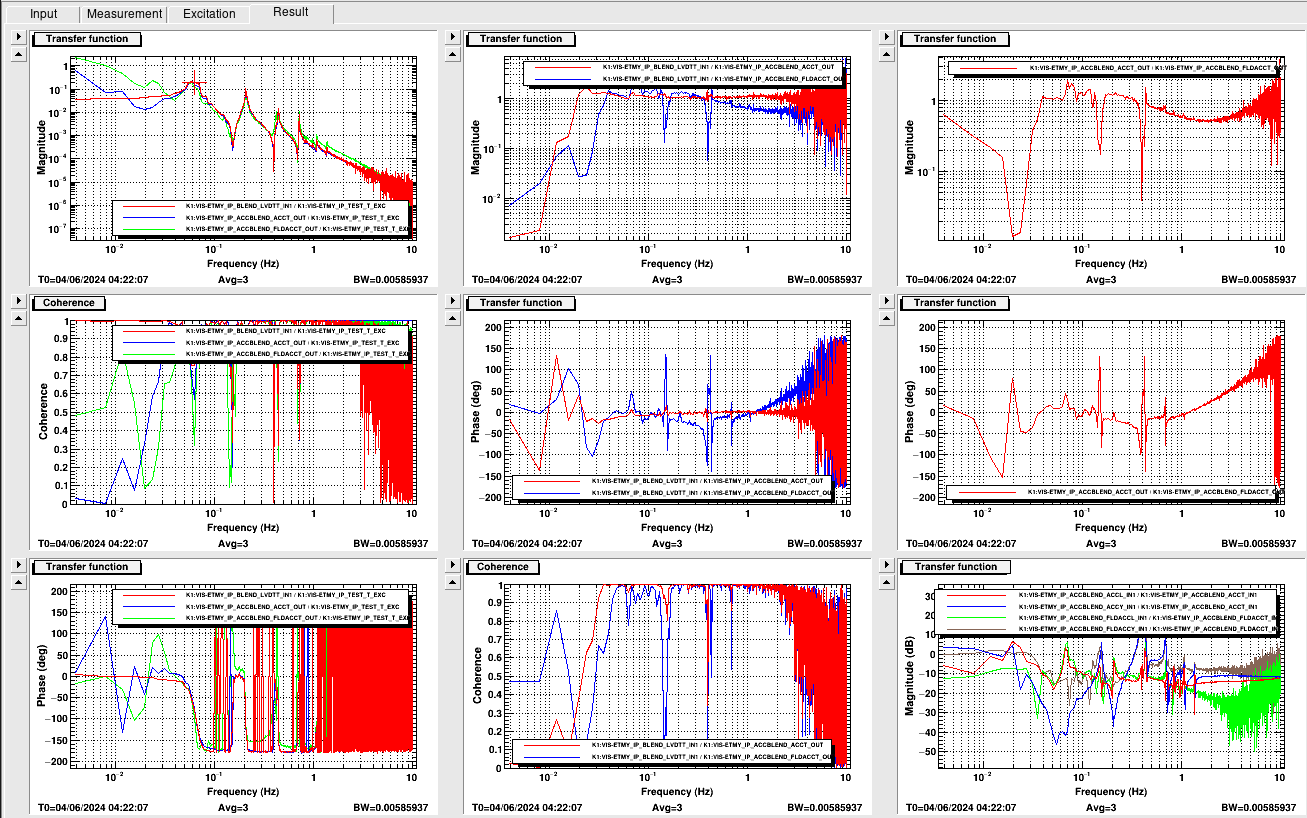
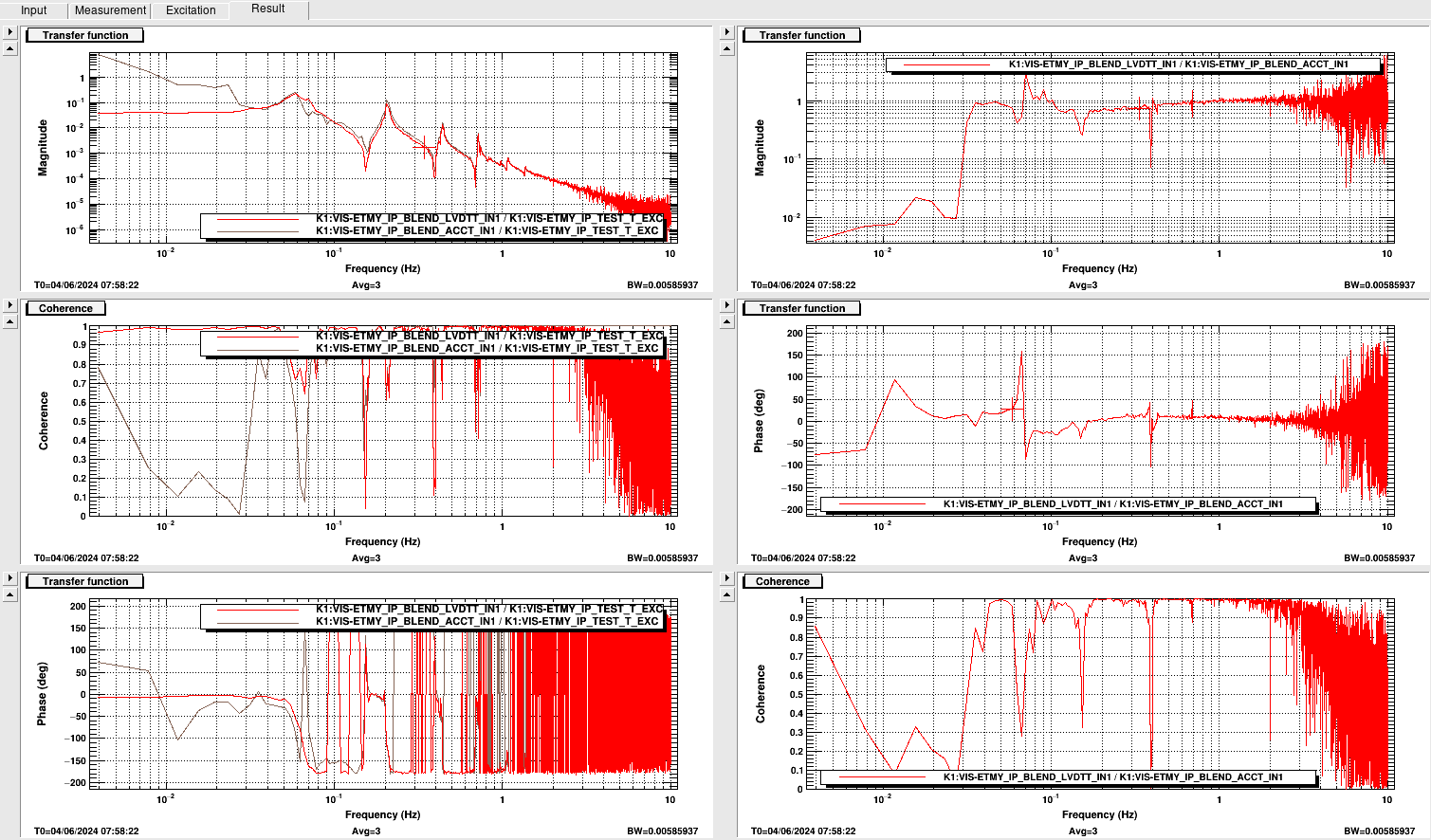
After implementing these into MEDM, I measured the TFs again and the coupling was reduced.
Next things to do:
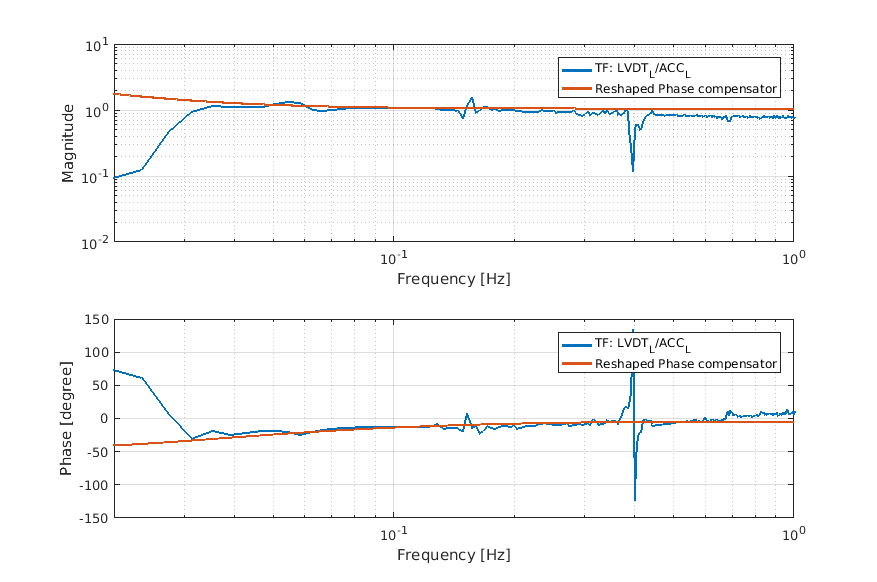
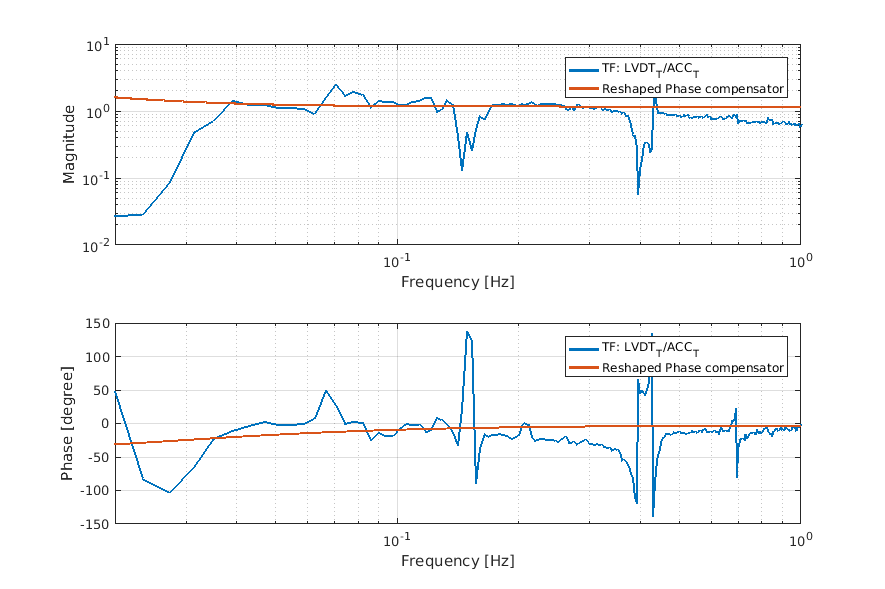
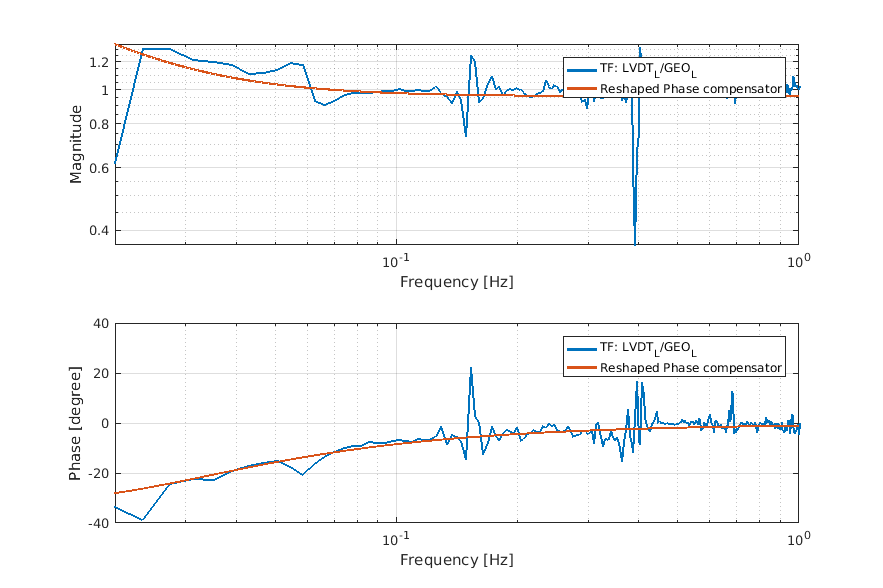
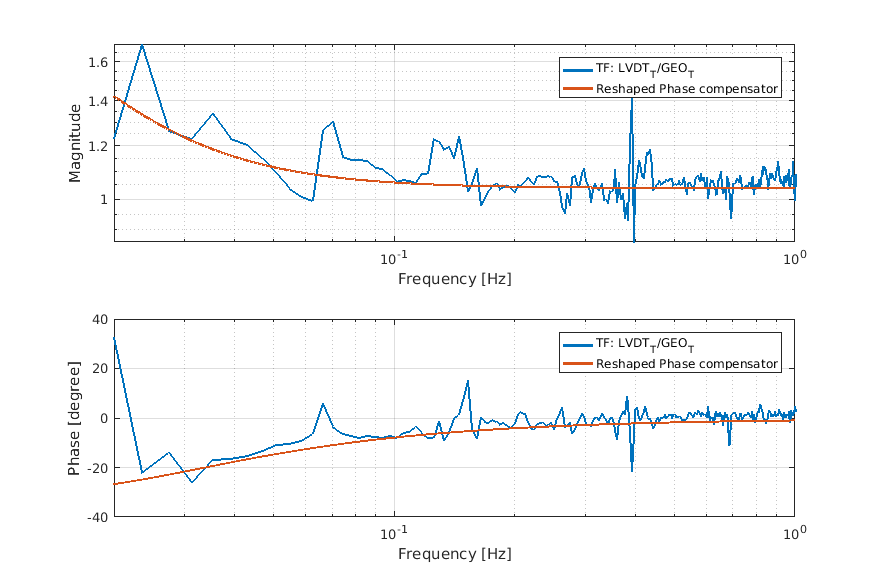
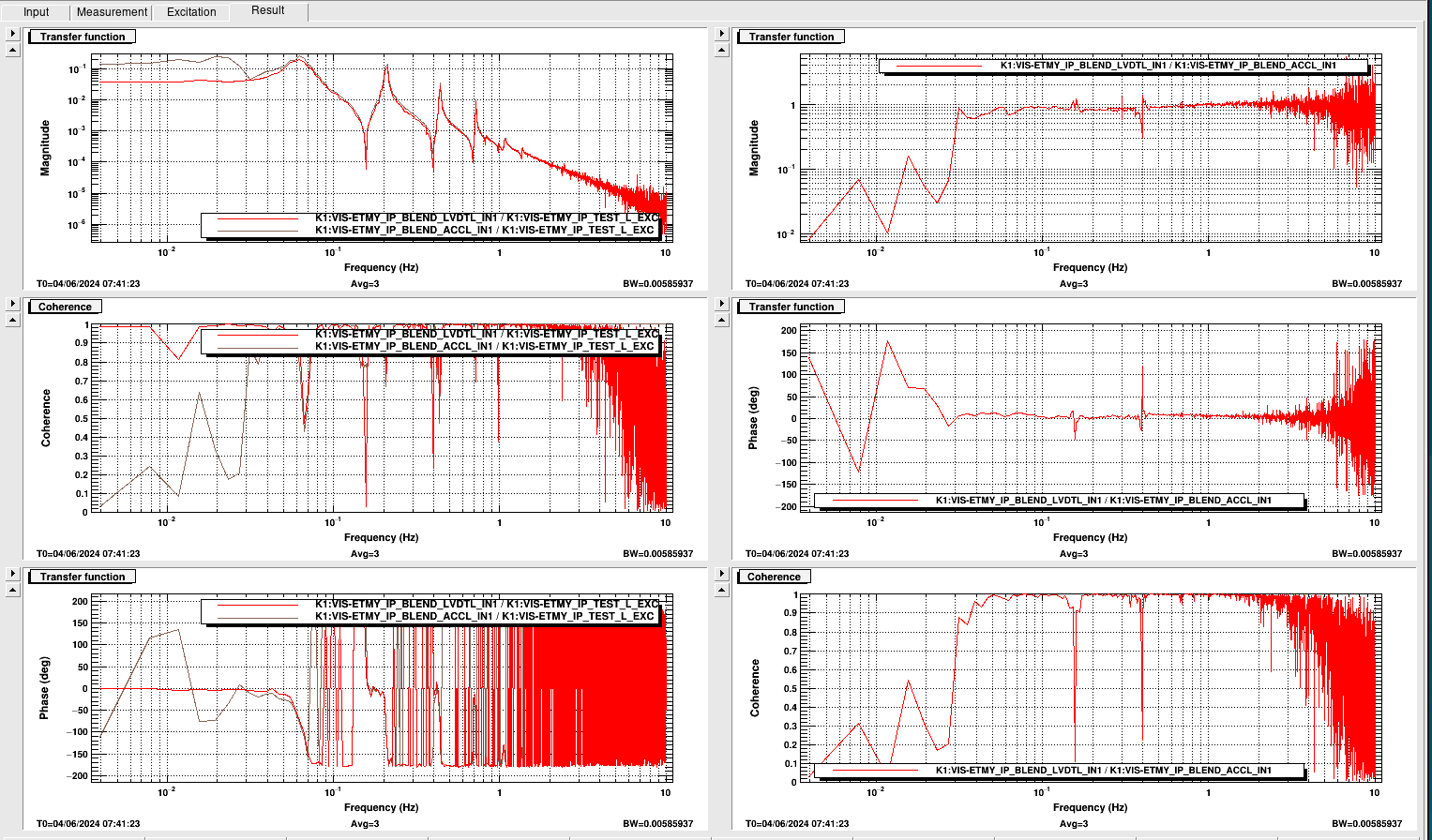
Measure all the TFs: GEO/LVDT, ACC/LVDT, IS/LVDT to design the phase compensators.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}