I performed an analysis of the noise budget, using data linked in Pastavi (thank you to everyone who helped me with this interface!). The goal is to determine what we should prioritize in order to reach the goal of increasing the BNS range from 1 to 10 Mpc. In order to determine the range, I used the gwpy.astro.range calculator, using the "sensemon_range" function. Note: in my experience every range calculator is a little different, so the values I report might be slightly different than other values calculated for the same PSD. The sensemon_range function calculates the furthest distance that a 1.4/1.4 solar mass merger could be detected at an SNR of 8. I used these default values in this calculation.
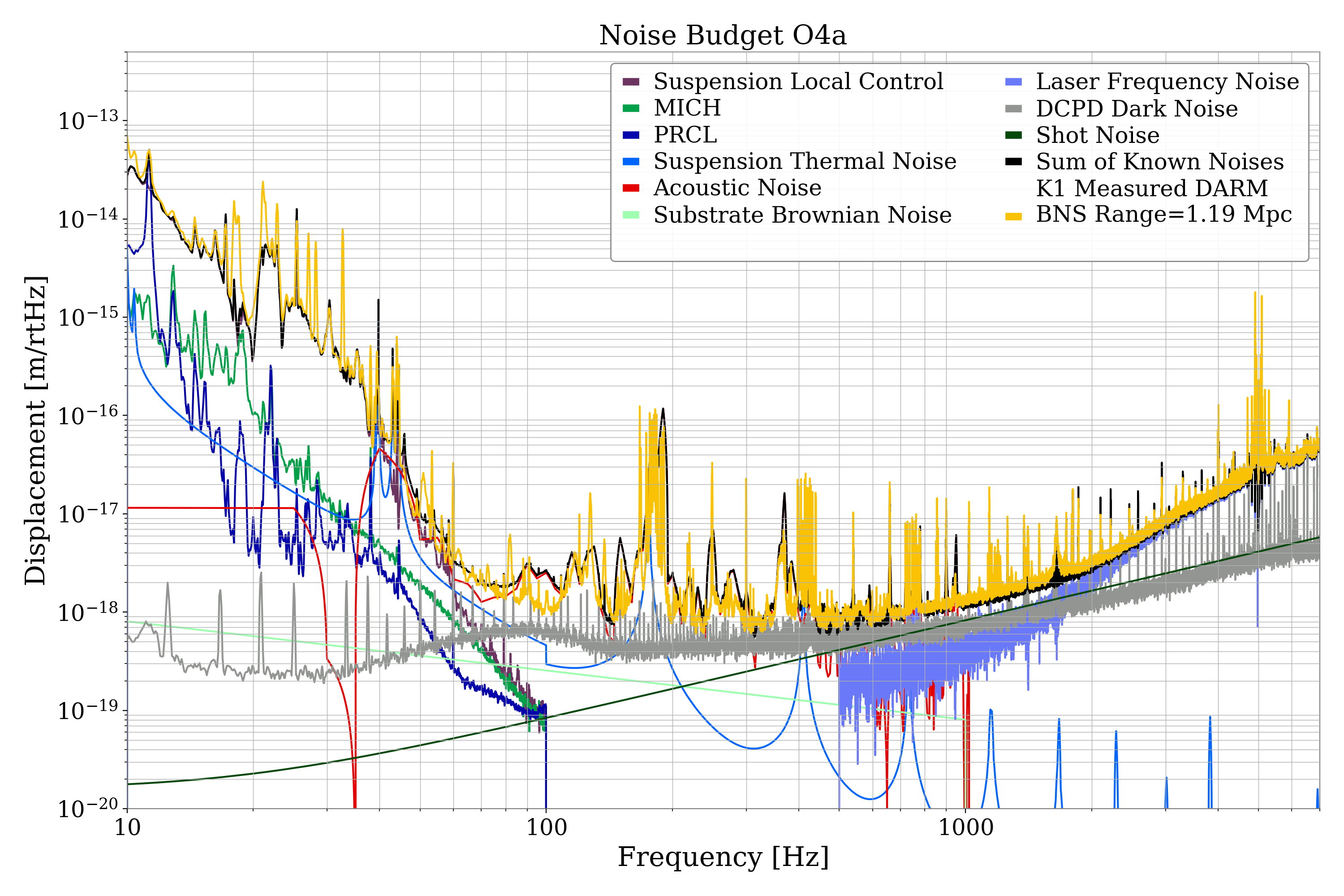
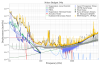
First, I downloaded all the traces, and generated my own version of the noise budget plot. The first attachment shows this plot. I combined all the suspension thermal noise traces into one trace for simplicity. While working on this, I noticed that the acoustic noise projection actually overestimates the noise contribution to DARM between 80-110 Hz.
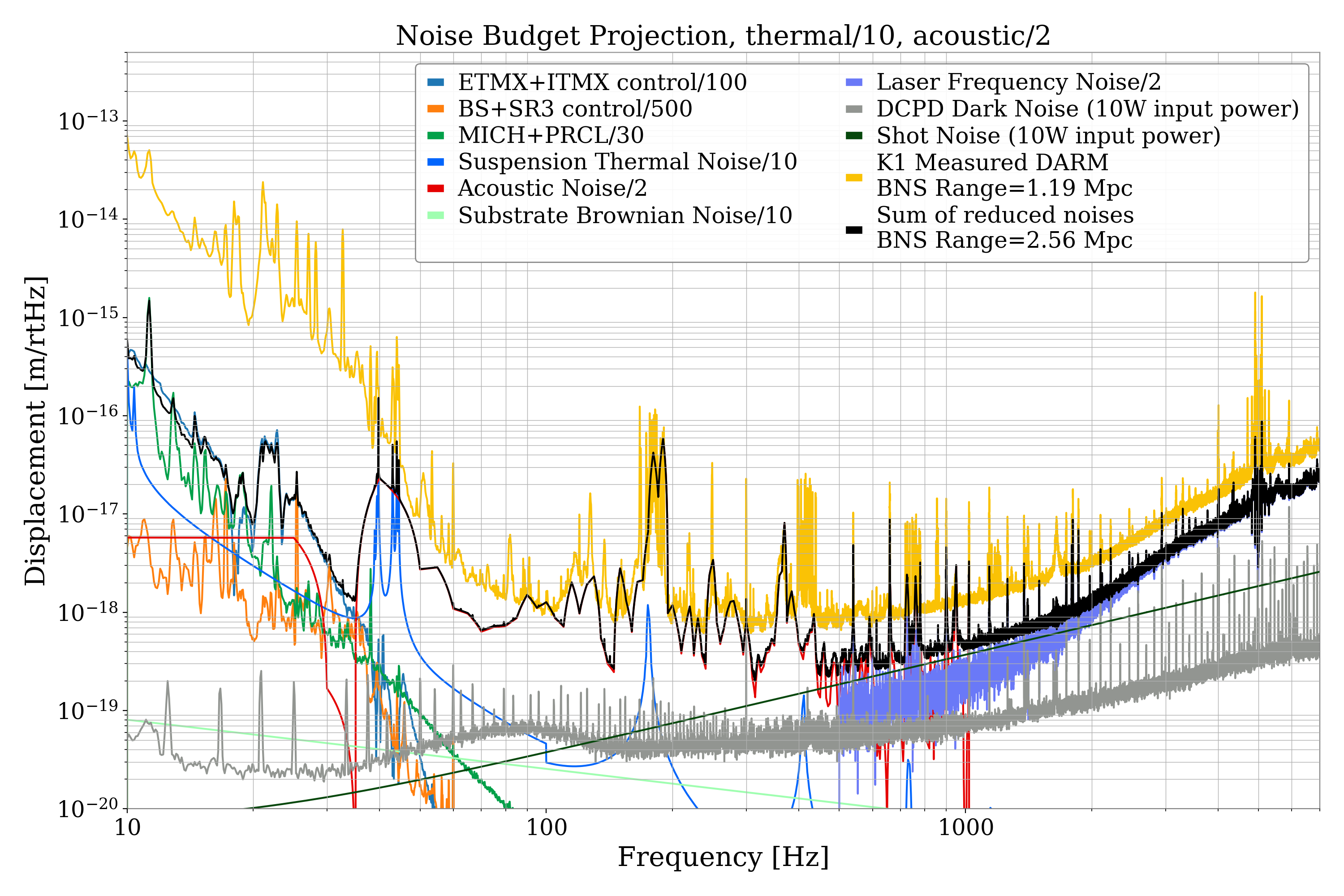
I tried to make some semi-realistic projections for how the various noise sources can be reduced.
Acoustic Noise
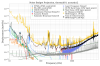
Acoustic noise is one of the most urgent noise sources to address. The success in understanding mitigating this source of noise will determine how much further the sensitivity can go in other areas. For example, if this noise is only reduced by a factor of 2, powering up will give very little improvement and even if great strides are made in other noise sources, the range could be limited to be only around 5 Mpc. Also, if this noise source depends on scattered light, powering up could actually make it worse. It is difficult to assume what improvements can actually be made on this source, but I enthusiastically assumed we could reduce it by a factor of 10.
Low Frequency Controls Noise
I addressed this noise next because the path to improvement is very clear. First, it is necessary to reduce all the suspension controls noise by at least a factor of 10 to reach the next noise source in this plot in that frequency band. The suspension controls noise in the budget is projected from the four worst sources of noise: BS TM yaw, SR3 TM P, ETMX and ITMX MN L. This is a combination of reinjected sensor noise from the osems in the marionetta and the oplevs in the test mass stage. Looking at the current control filters in use and the modeled plants in foton, I made some adjustments to the low pass cutoffs for these filters. I was able to change the loop shape for all four control loops to reduce noise injection above 10 Hz. Based on this work I estimate we can reduce the contribution from the BS and SR3 by 55 dB, while maintaining a phase margin of 30 degrees or more at the UGF. I estimate that we can reduce the ETMX/ITMX contribution by 20 dB with a phase margin of 27 degrees or more at the UGF (I will say more about this in a different log). This is sufficient to bring the noise to the next noise known noise source of MICH and PRCL. I didn't look at any other suspension controls, but if these four sources represent the worst, I assume we can also suppress any noise from the other suspension controls in a similar way.
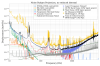
I assumed that if the low frequency noise from the suspension controls is improved, any injection made to calculate the LSC feedforward can also be improved, which would then improve the suppression of the LSC noise in DARM. However, the current MICH and PRCL levels are similar to the suspension thermal noise level in this band. A factor of 2 improvement in both MICH and PRCL is sufficient to reach this next noise source, which would be a combination of suspension control noise and suspension thermal noise. We would once again be limited by the test mass suspension control loops. If we do a more in-depth redesign of the loops and suppress the test mass controls noise by a factor of 30 (instead of the 10 above) and acheive a factor of 10 improvement to the LSC noise we would be limited only by the thermal noise. From experience in LIGO, I think a factor 10 reduction in MICH and PRCL is possible.
Frequency Noise
Improving the frequency noise alone will have almost no effect on the range alone, but it is necessary in order to see the benefit of increasing the laser power. Reducing frequency noise by a factor of 2 is sufficient to powering up to 5 or 10W. We would also need to ensure there is no degradation in the mode matching of the IFO from powering up that might re-increase the frequency noise.
Shot/Dark Noise
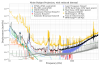
With lower frequency noise and acoustic noise, increasing the laser power becomes beneficial. We reduce the shot noise by sqrt(P) and dark noise by P. Yesterday Masayuki was able to increase the laser power out of the IMC to 11W, so I used 10W for this noise budget, or an improvement in dark noise by 5 and shot noise by sqrt(5).
Thermal Noises
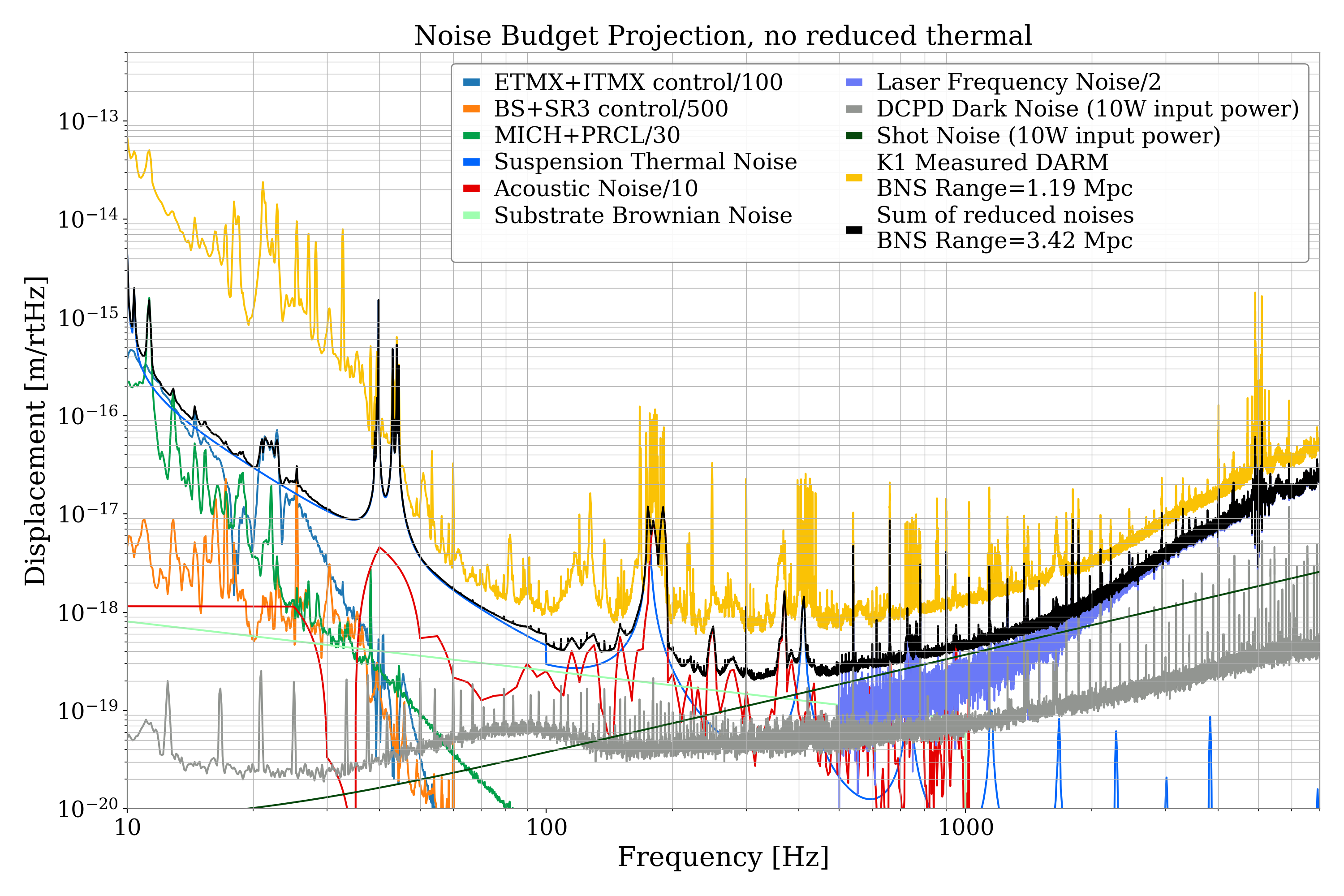
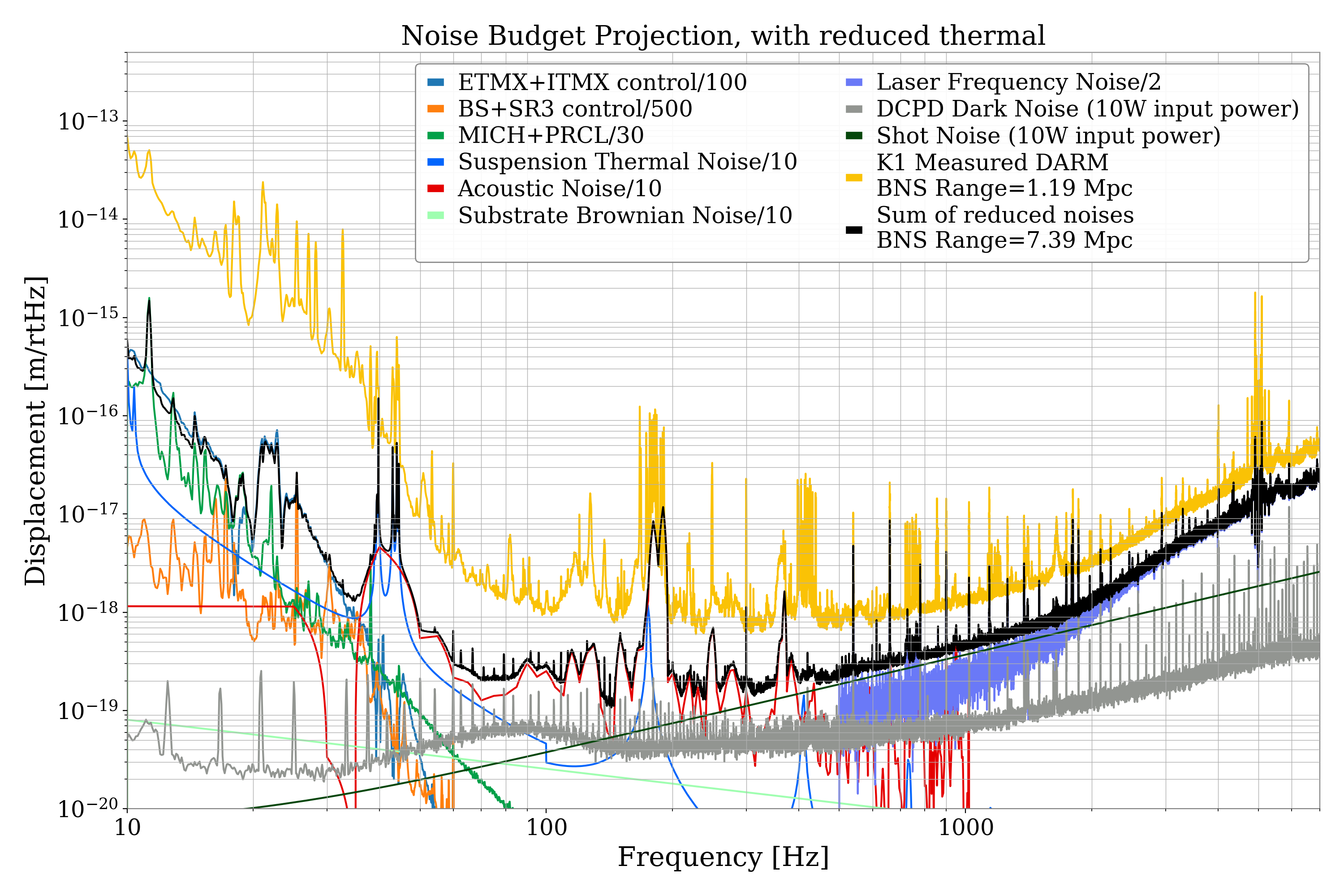
At this point, the noise budget becomes limited by suspension thermal noise. Masayuki and I think one of the first priorities should be to take a ringdown measurement of the suspension in low noise to determine the Q. This is a more direct measurement, and it can tell us how close this current noise budget estimate is to the actual suspension thermal noise. We should also make a reasonable estimate of how much the thermal noise might improve from reducing the temperature. Assuming all the improvements that I listed above, no improvement to both the substrate and suspension thermal noise would mean that the best range is only 3.5 Mpc. Reducing the thermal noise by a factor of 10 each would bring the highest possible range to 7.4 Mpc.
Conclusions
There is a lot of conjecture here! I only made use of the noise budget traces in Pastavi, so there is a chance that there is an additional source of noise that I have failed to consider. Two sources that immediately come to mind are intensity noise and coating brownian noise.
However, these projections give us an idea of the most important steps to take to improve the sensitivity. Acoustic noise is the most important to address. Controls noise is next, and will mostly be a matter of time and effort. Developing an understanding of the CARM loop will be important. We should also continue to measure the Qs of the suspensions and substrates to confirm thermal noise levels
Although increasing the power will help the most in sensitivity, we cannot do that without a good understanding of the CARM loop, intensity noise and acoustic noise. Robust angular controls will also be required.
Regarding the noise budget itself, it is a good idea to develop a repository for the measurements, traces and calculation code. If we set up a consistent methodology to take noise budget measurements it becomes easier to track all the noise sources (there are many), and compare interferometer changes. Generating plots and making projections like I did in this log will also become easier.
{kind=link}
{kind=link}
{kind=link}
{kind=link}