This klog refers to the past day's work.
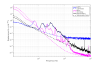
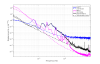
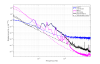
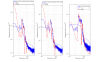
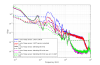
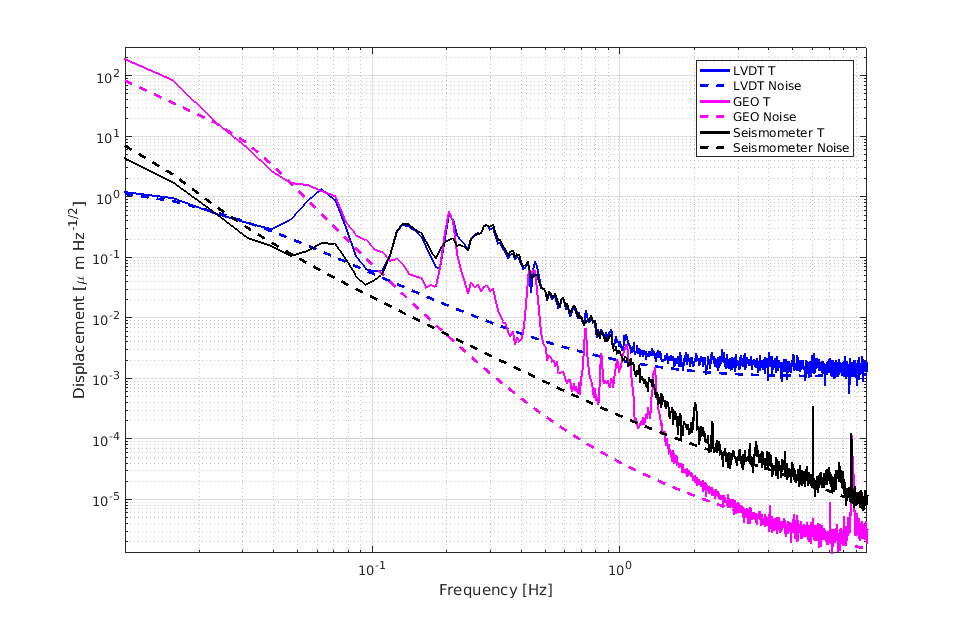
As already done for IX, EX, and EY, I estimated the noise of the LVDT, seismometer, and geophone as sensors involved in the sensor fusion.
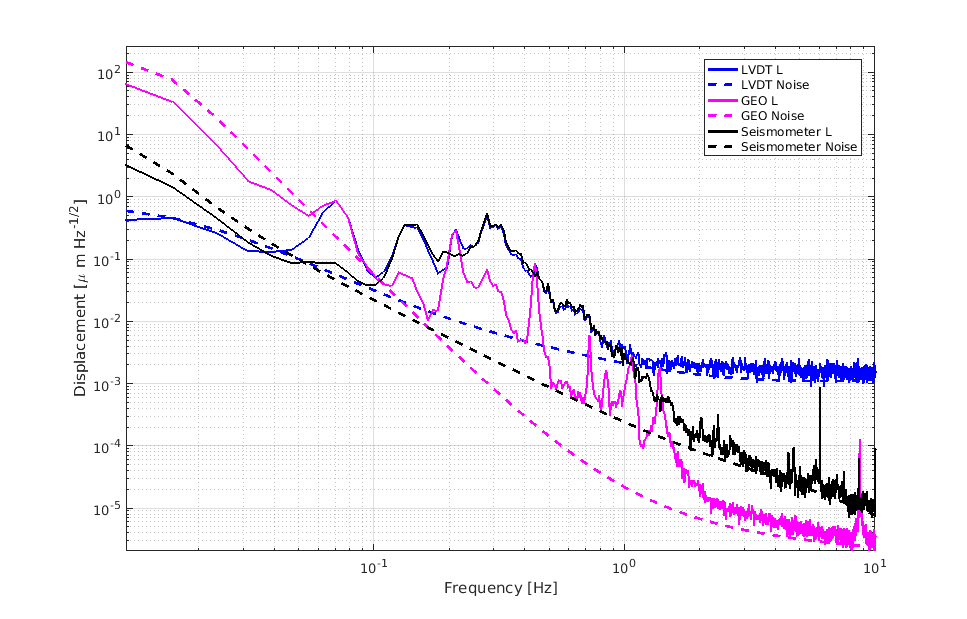
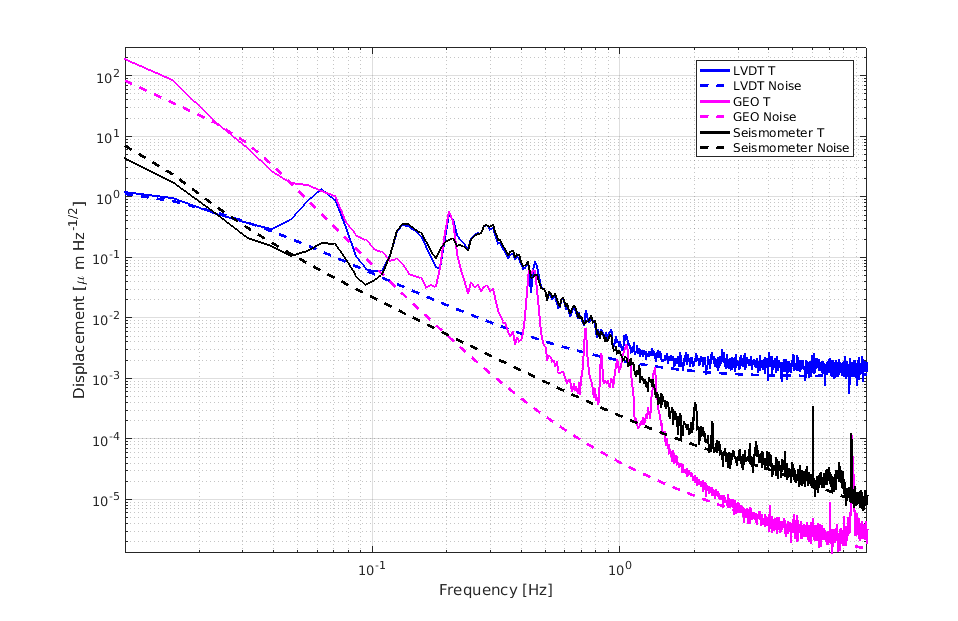
Pic1, Pic2, and Pic3 show the estimated noise along the L, T, and Y directions of each sensor mentioned above.
Then I measured the spectra of IP_{L,T,Y}, B_{L,T} and TM_{L,P,Y} when the following configuration where on:
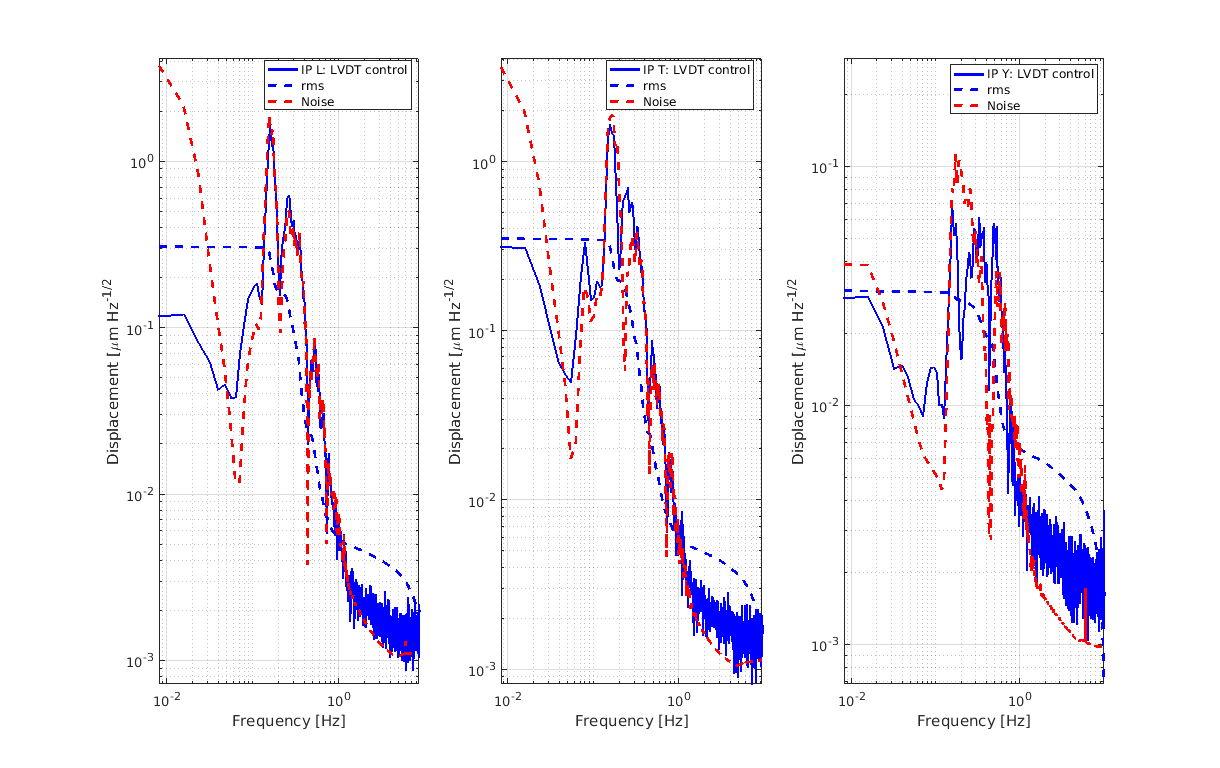
1) IP: LVDT control
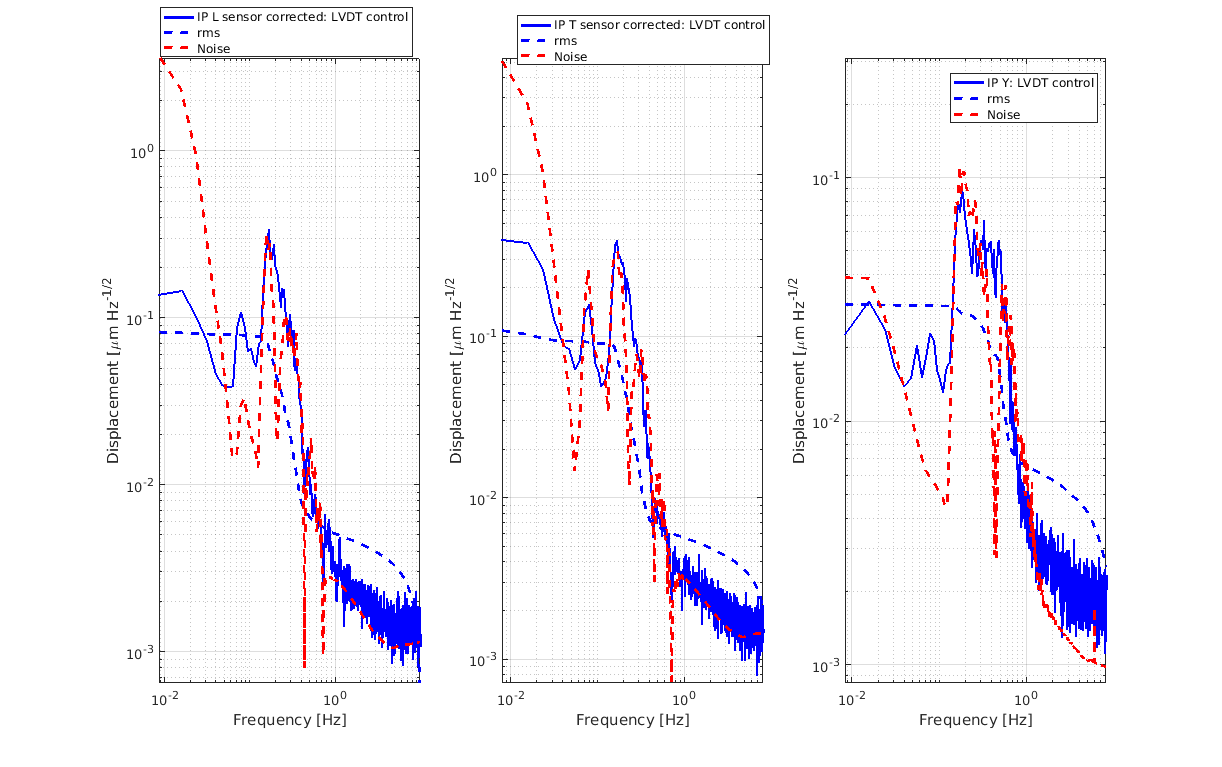
2) IP: LVDT sensor corrected
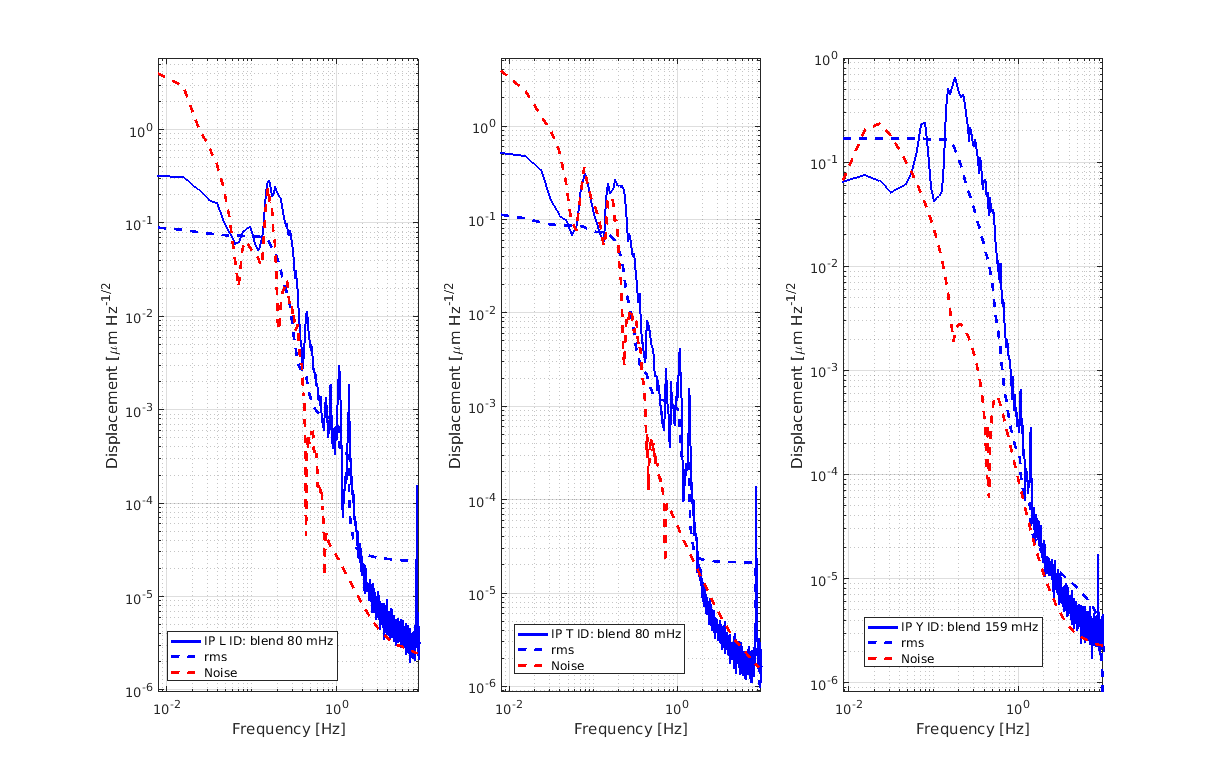
3) IP: blending @80 mHz along L and T and blending @150 mHz along Y.
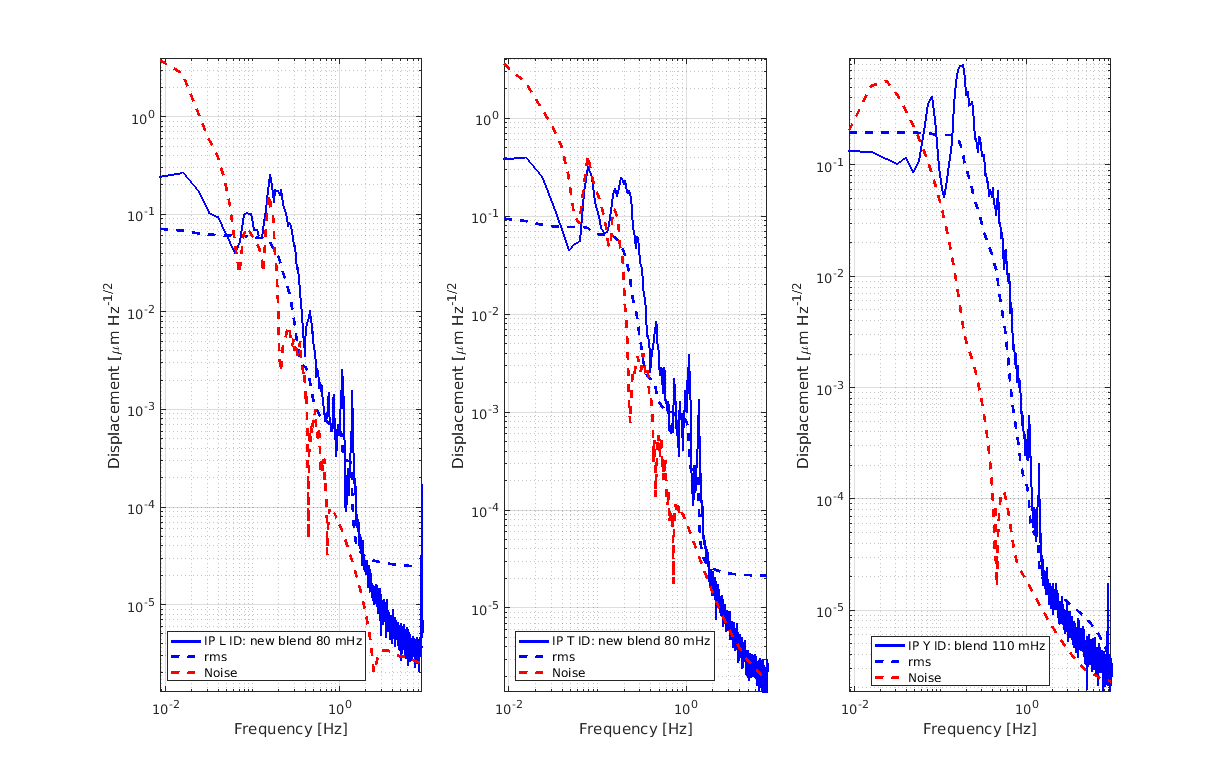
4) IP: new blending @80 mHz along L and T and blending @110 mHz along Y.
5) IP: new blending @80 mHz along L and T and blending @110 mHz along Y. UGF of the loops @ 1 Hz.
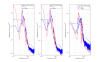
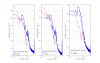
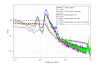
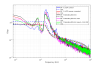
Pic4, Pic5, and Pic6 show the spectra of the IP compared to the CL noise and rms when configurations 1,2, and 3 are on. Also here, It is possible to see that by changing from LVDT control to ID control the rms and the re-injection of the seismic noise via LVDT are reduced, but there are still some rooms to improve the situation by reshaping the blending and control filters.
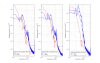
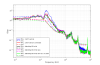
Pic.7 and Pic 8 show the IP spectra when configurations 4 and 5 are on. The rms along the 3 DOF are reduced.
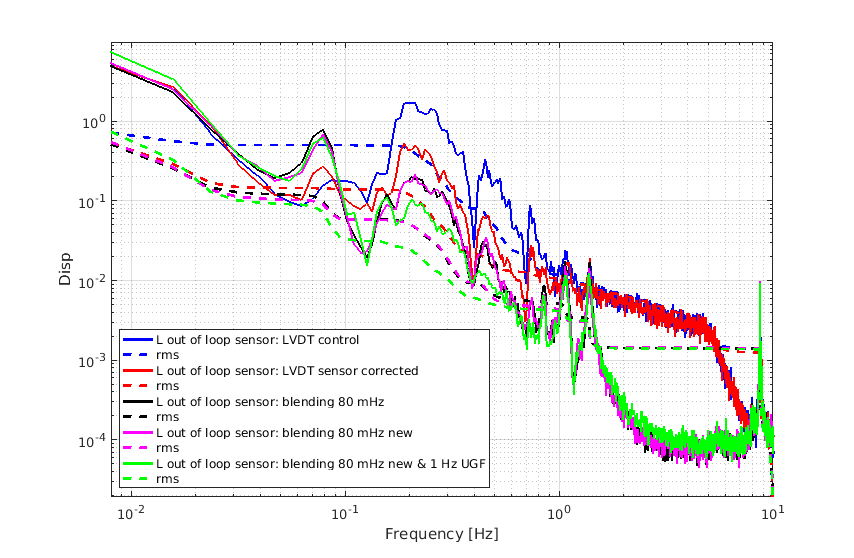
Pic9 shows the spectra of IP acquired by the out-of-loop sensor H4. Here It is possible to see that changing from LVDT control to ID 80 mHz new and UGF 1 Hz, the suppression of the micro-seismic noise is about a factor of 17.8 in terms of rms.
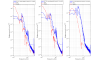
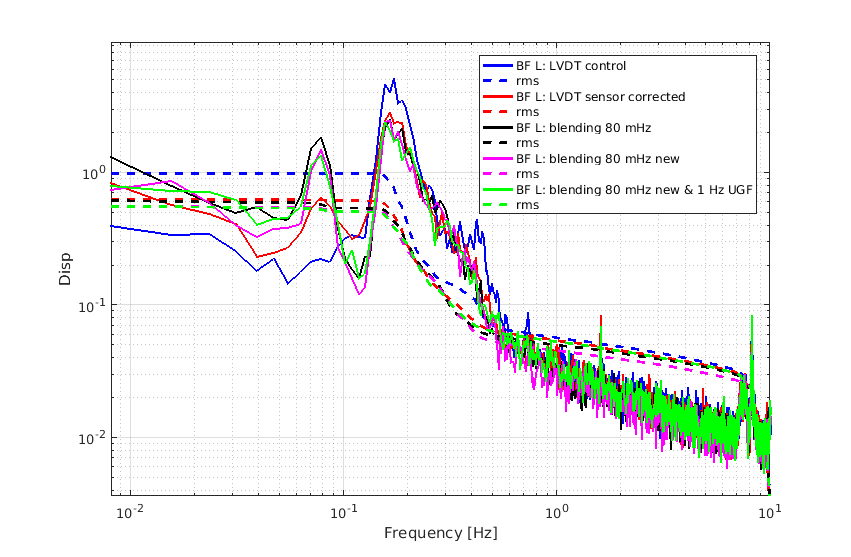
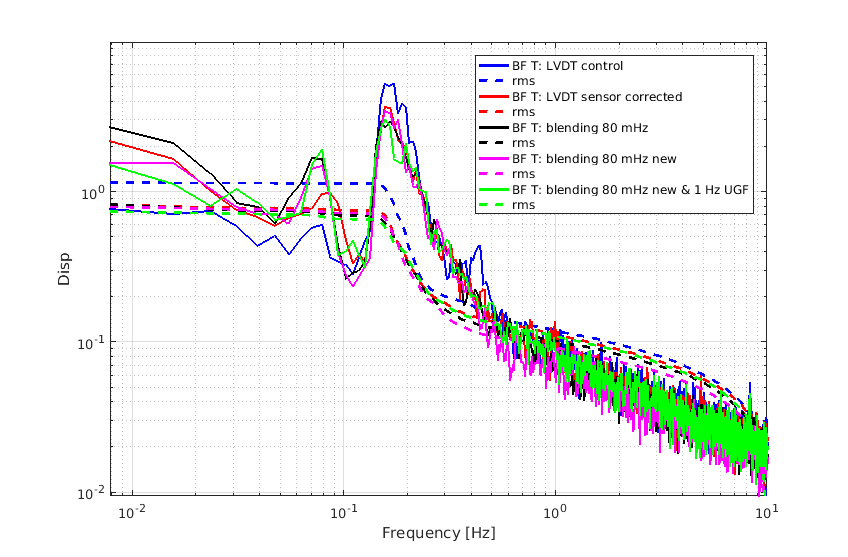
Pic10 and Pic11 show the BF spectra along L and T directions. Also here it is possible to see the benefits of the new strategy: a factor of 2 of reduction in terms of rms in the frequency region [0.120-0.350]
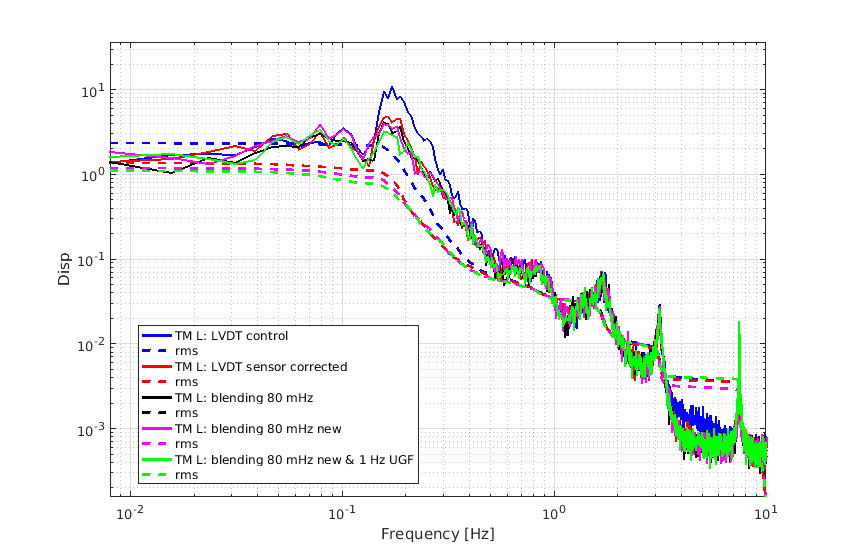
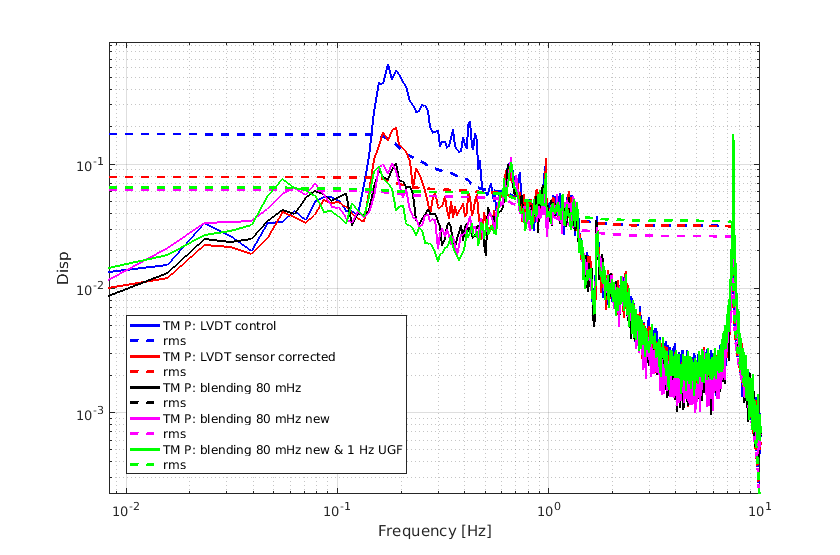
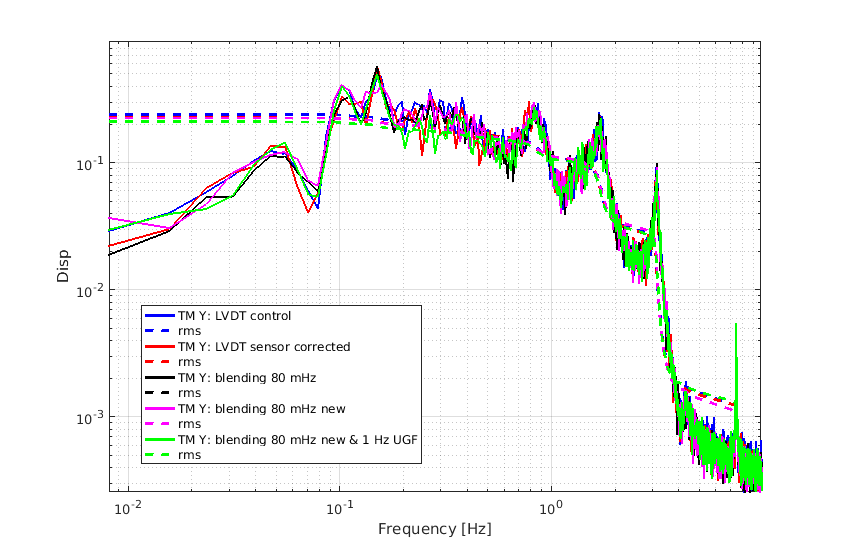
Pic12, Pic13, and Pic14 show the TM spectra along L, P, and Y directions. No evidence of re-injection of geophone noise below 0.1 Hz has been detected.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Pic 3 is the same as Pic.2.