Summary: A control loop for Yarm ITMY was attempted. It was successful for both pitch and yaw but I forgot to clear history and kicked something that I could not recover.
Using the matrix from klog22578 combinations to obtain a diagonalised matrix are written below - there were a few phase errors in klog22578 which have been checked and corrected here.
| Y | IY PIT | : | EY PIT | : |
| QPD1 RF17 PIT | 225.17 | 2 | -612.19 | 1 |
| QPD1 RF45 PIT | 393.80 | -843.36 | ||
| QPD2 RF17 PIT | -580.91 | 1 | 642.02 | 1 |
| QPD2 RF45 PIT | -630.04 | 732.76 |
RF17
IY = QPD1 + QPD2
EY = 2*QPD1 + QPD2
A control loop for the pitch of ITMY was attempted first. From ASC_OVERVIEW the WFS input matrix was opened. A 1 was entered in the REFL1 RF17 and REFL2 RF17 collumns, in the unused servo filter DOF1 row. Then in the output yaw matrix, a 1 was entered in the DOF1 collumn for the ITMY row. Next the ndscope for the input to the filter (K1:ASC-DOF1_P_IN1_DQ) was used to check the offset, which is around -4000. Then ALL_OPTICALIGN was used to move the offset slider to find what sign the filter gain should be. In this case, decreasing the slider offset (making it more negative) caused the counts to go closer to zero, so the sign of the filter gain should be negative. A gain of 10^-2 was initially estimated from the counts level. The filter was then switched on to see if it worked. It took about 30 seconds to get to zero (UGF of 0.03) so to obtain a UGF of 1 the gain was multiplied by 30 and the loop was working.
| Y | IY YAW | : | EY YAW | : |
| QPD1 RF17 YAW | -855.72 | -1019.16 | ||
| QPD1 RF45 YAW | -1298.65 | 1 | -1572.35 | 1 |
| QPD2 RF17 YAW | 1229.75 | 544.36 | ||
| QPD2 RF45 YAW | 1290.98 | 1 | 563.36 | 3 |
RF45
IY = QPD1 + 3*QPD2
EY = QPD1 + QPD2
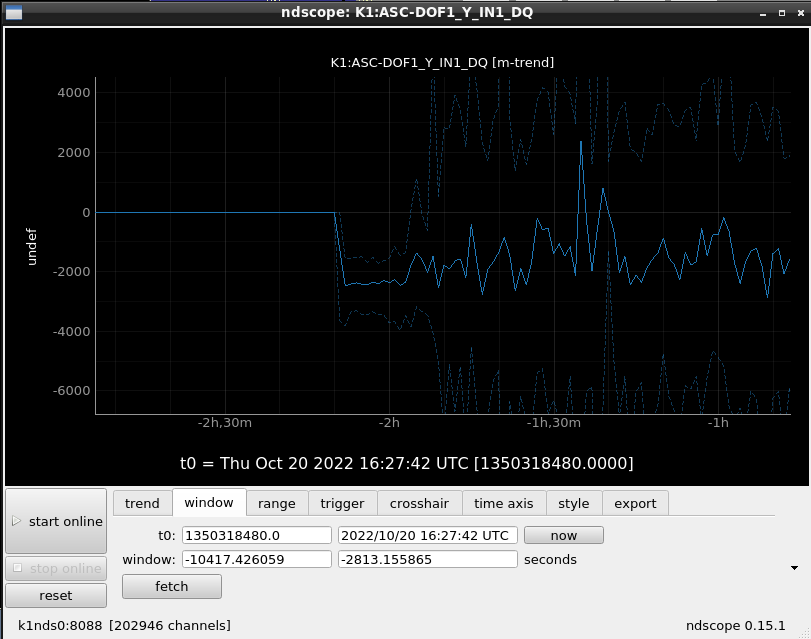
The same was done for ITMY yaw (with 1 and 3 were entered into the input matrix) and the servo filter was copied from pitch. When turned on the first time it worked and the error signal was brought to zero. When turning on again (around 23:30/24:00) I think I forgot to clear history and kicked something. Due to it working originally and everything seeming fine I think this is the problem. The count signal in K1:ASC-DOF1_Y_IN1_DQ became very unstable and I couldnt recover (screenshot attached of channel before and after). In pitch, the count level is stable around -4000 counts still, but the yaw varies from -5000 to +5000 randomly. After a lot of trouble shooting I still couldnt find what is moving/what I kicked.

{kind=link}