I proceeded to align the actuation coils to the LVDT's L, T, Y basis
To do so, I first put DC offsets individually in TEST L, T and Y and measured the changes in L, T, and Y given by the LVDTs.
I put 1000 counts offset for L and T, while 10000 counts for Y. The LVDT displacements are taken before and after the actuation. A 30-second average is used.
Then I obtain a decoupling matrix to put in IP_ACTALIGN using a method more or less similar to that described in 16563 (In this case the initial matrix is an identity).
In short, the decoupling matrix is obtained by
where is the "actuation efficiency" defined by the change in displacement divided by the amount of actuation. (The Diag() here retains the gain of the original diagonal transfer functions)
After setting the matrix, I did a sanity check with the DC offsets again and the actuation coupling at DC becomes negligible.
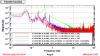
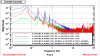
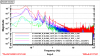
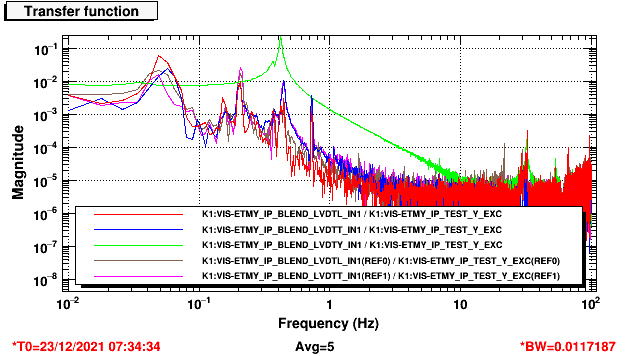
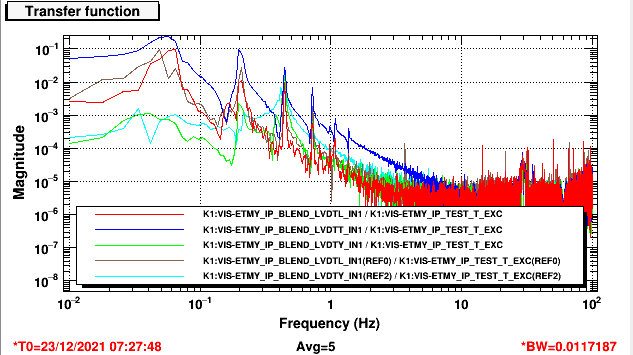
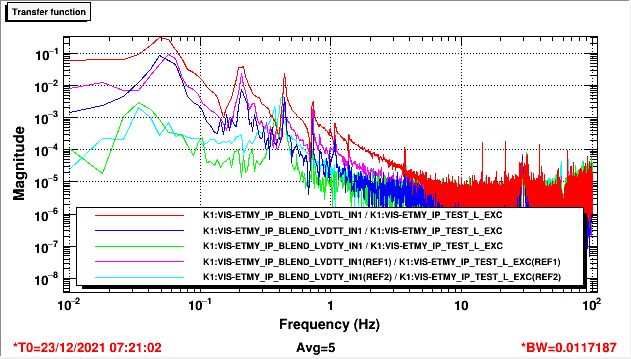
Then I measured all transfer functions and they're shown in Fig 1-3. References are measured before applying the ACTALIGN matrix.
There are slight decreases in all the cross-transfer functions across all frequencies and particularly at lower frequencies.
The new IP_ACTALIGN matrix is
[[ 0.96921235, -0.20688415, -0.03888538],
[0.14775887, 0.96899623, -0.02426159],
[-0.02102461, -0.02477746, 1.00137977]])
Calculations was done in notebook /kagra/Dropbox/Subsystems/VIS/vis_commissioning/etmy/notebook/diagonalization/ip_coil.ipynb
{kind=link}
{kind=link}
{kind=link}