[Ushiba, Tamaki]
Abstract
We did sensor balancing of MN and IM for ITMX using transfer function.
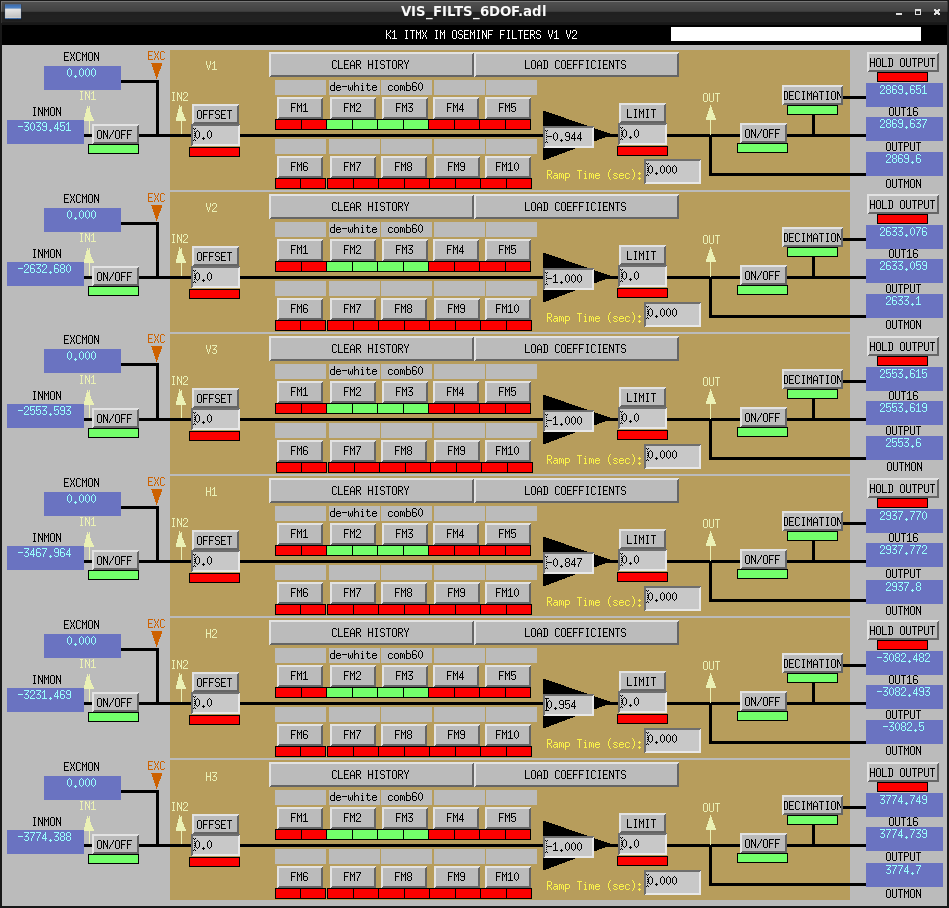
Then we put the gain into K1:VIS-ITMX_{MN,IM}_OSEMINF_{H1,H2,H3,V1,V3}_OUTPUT like Fig1 and 2.
Detailed
We have diagonalized OpLev last week, so we became to be able to monitor DOF independently. And we balanced actuator (klog 17672 and 17683) in this week.
However, the sensitivity of sensor had be disparate yet so we did sensor balancing of MN and IM for ITMX by adjusting the gain.
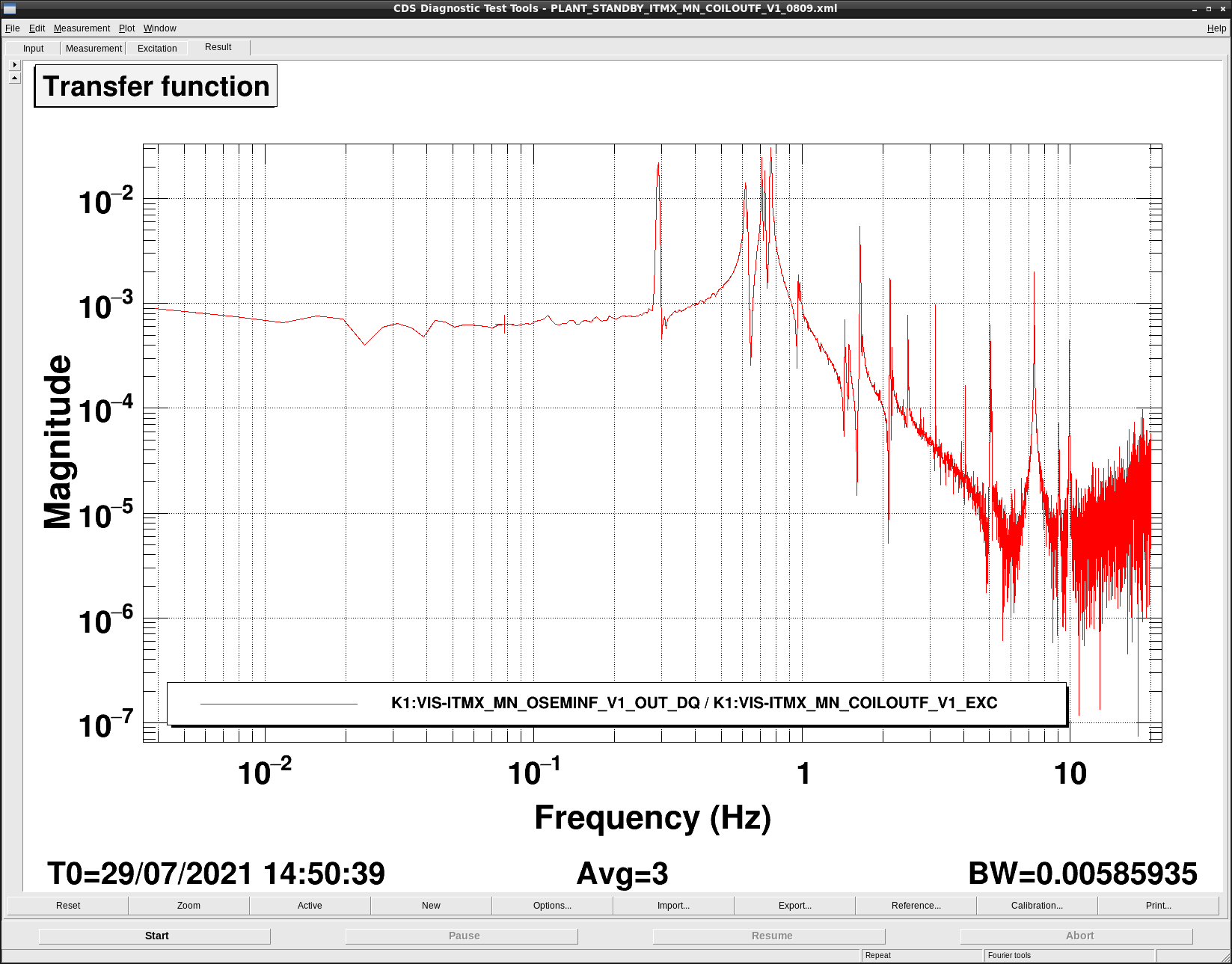
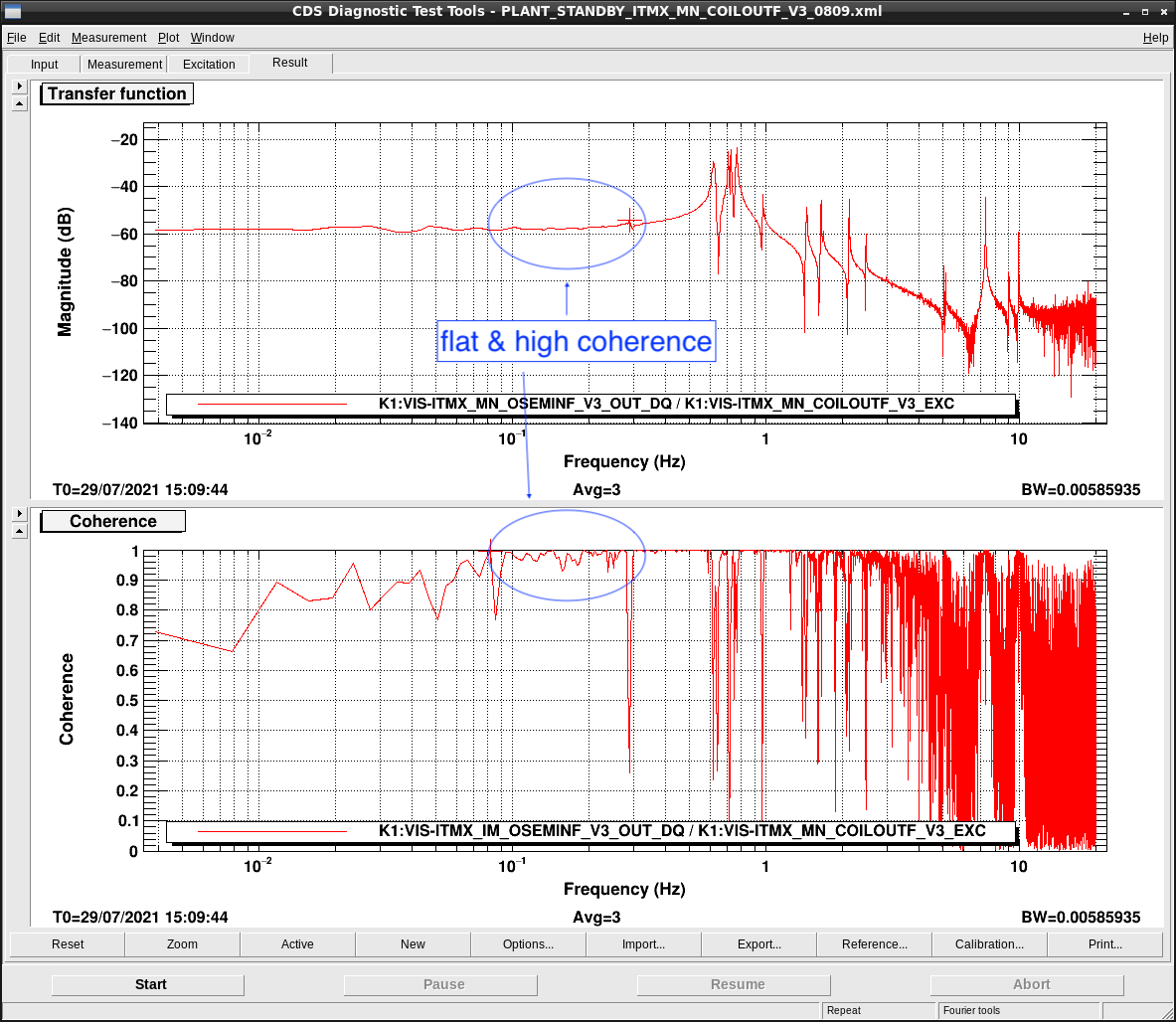
We used the transfer function (K1:VIS-ITMX_{MN,IM}_OSEMINF_{H1,H2,H3,V1,V3}_OUT_DQ / K1:VIS-ITMX_MN_ COILOTF_{H1,H2,H3,V1,V3}_EXC).
(We didn't measure V2 because we didn't balance actuator (there is no sensor))
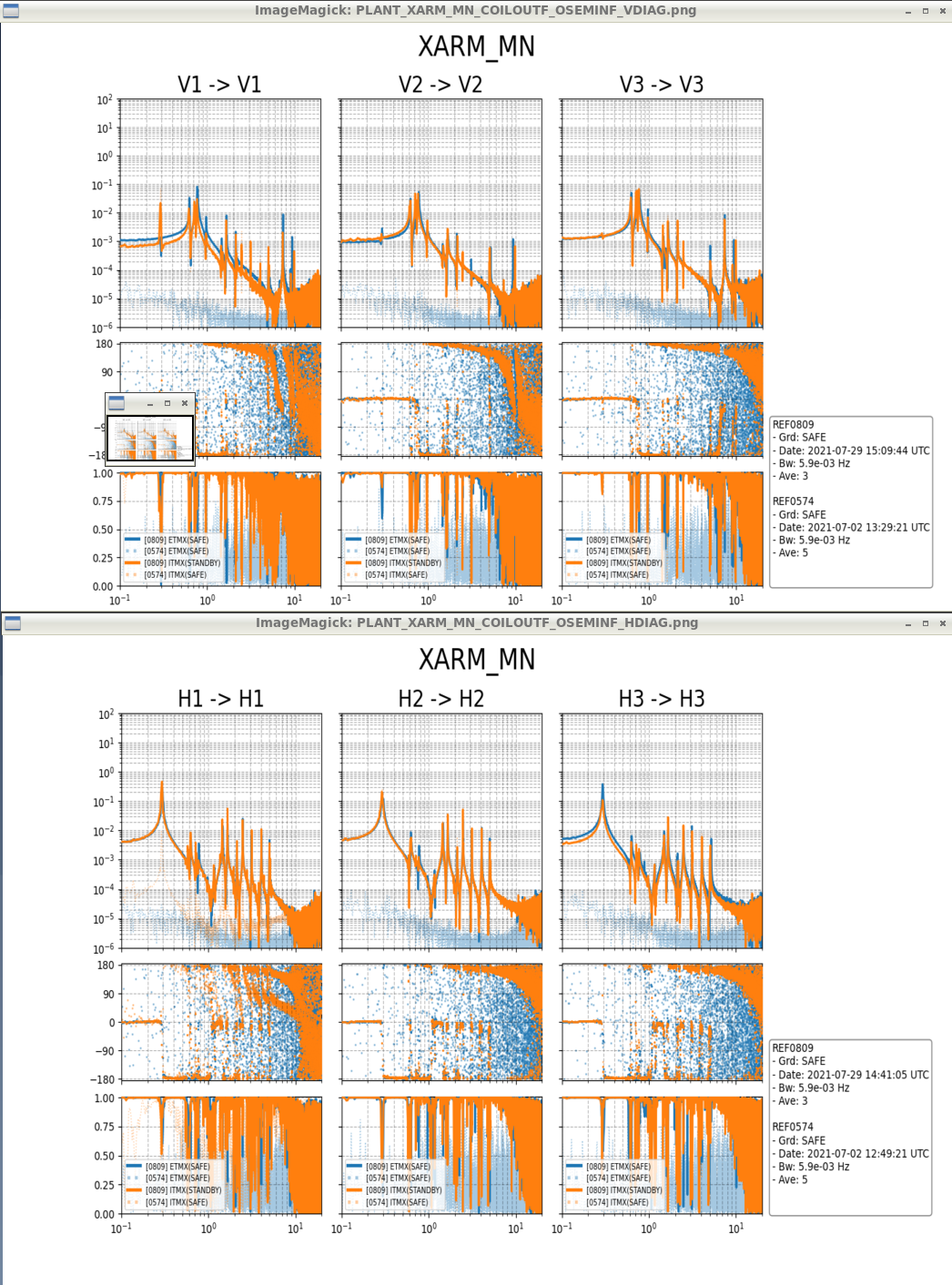
The pictures of these transfer functions are in /kagra/Dropbox/Measurements/VIS/figures (File name is PLANT_XARM_MN_COILOUTF_OSEMINF_{H,V}DIAG.png).
We took the average of five points in flat and high coherence area (like Fig 4), and decided the gain as follows (Fig 1,2).
MN
V1: -1.000
V3: -0.512
H1: -0.822
H2: -0.745
H3: -1.000
IM
V1: -0.944
V3: -1.000
H1: -0.847
H2: -0.954
H3: -1.000
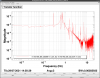
We didn't put the gain of MN V1, V3 because there was the suspicios point in transfer function of V1.
・Although we didn't actuate, the signal can be seen (Fig3).
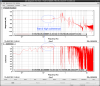
・There is the signal of rotation direction despite this sensor monitors vertical direction. (On the other hand, there is no peak in the transfer function of V3 (Fig4).)
As mentioned above, the gain ratio of V1 to V3 calucurated was 2:1.
This may be caused because one side of these sensors is out of order.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}