[Kenata, Masayuki]
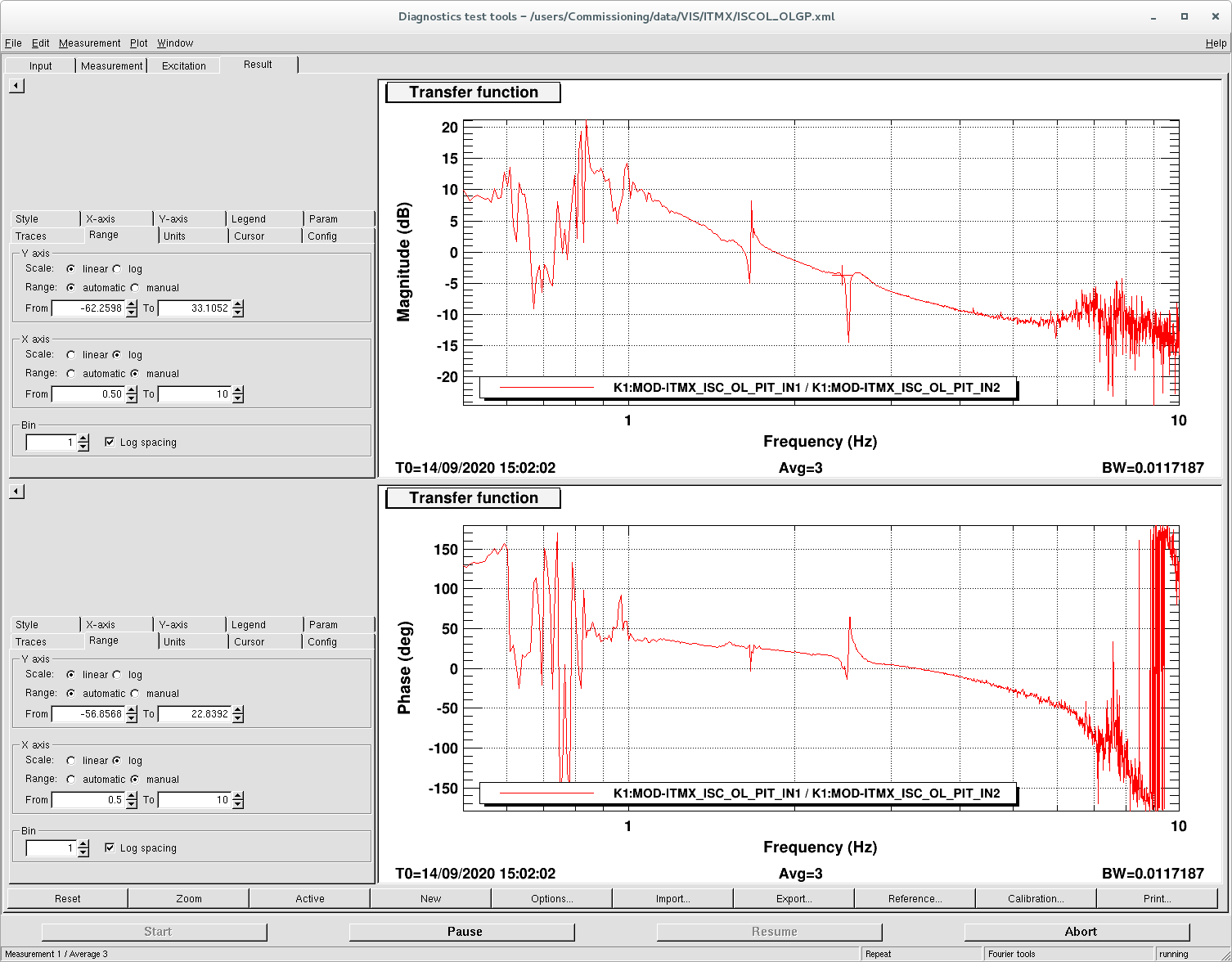
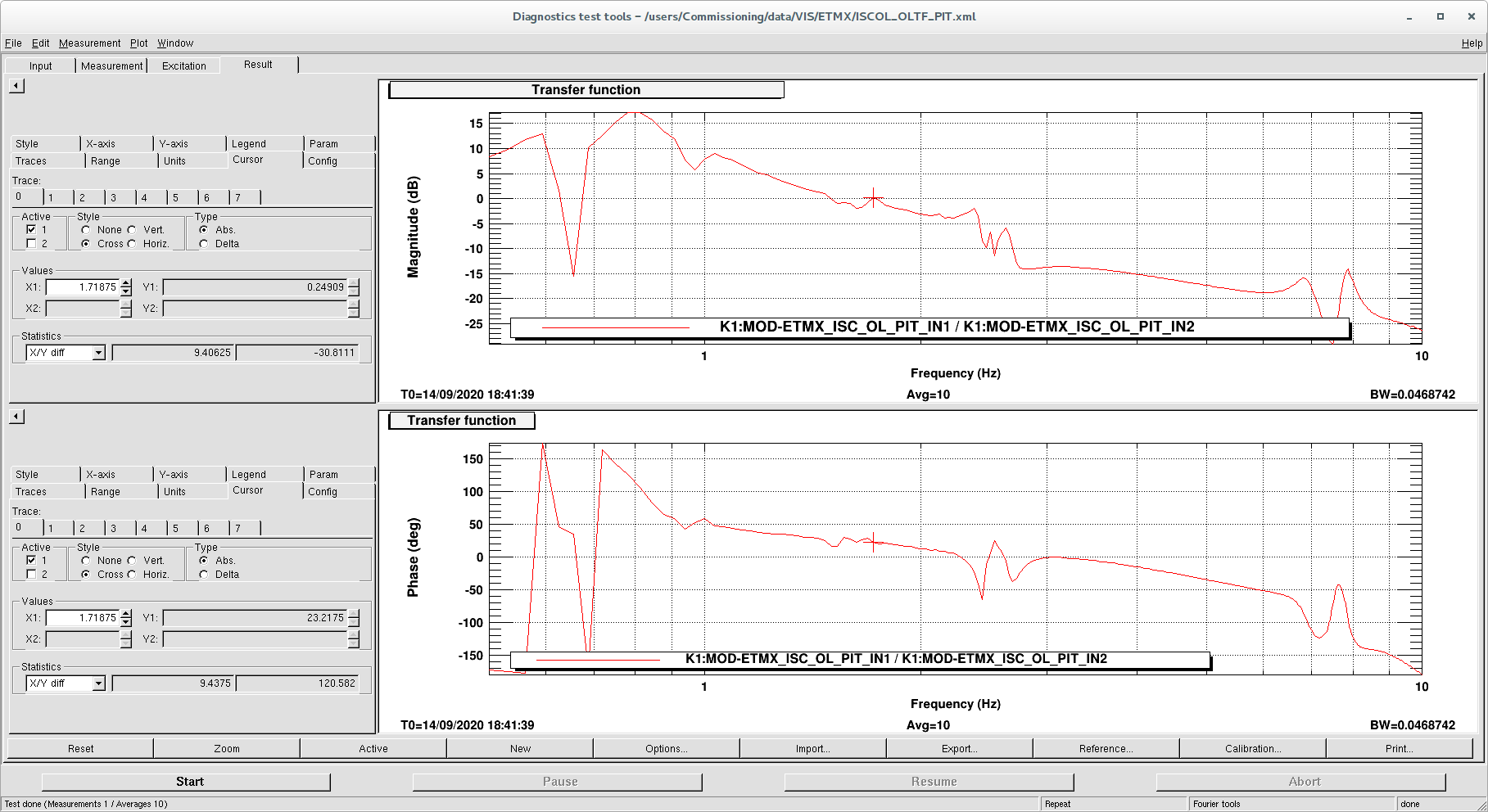
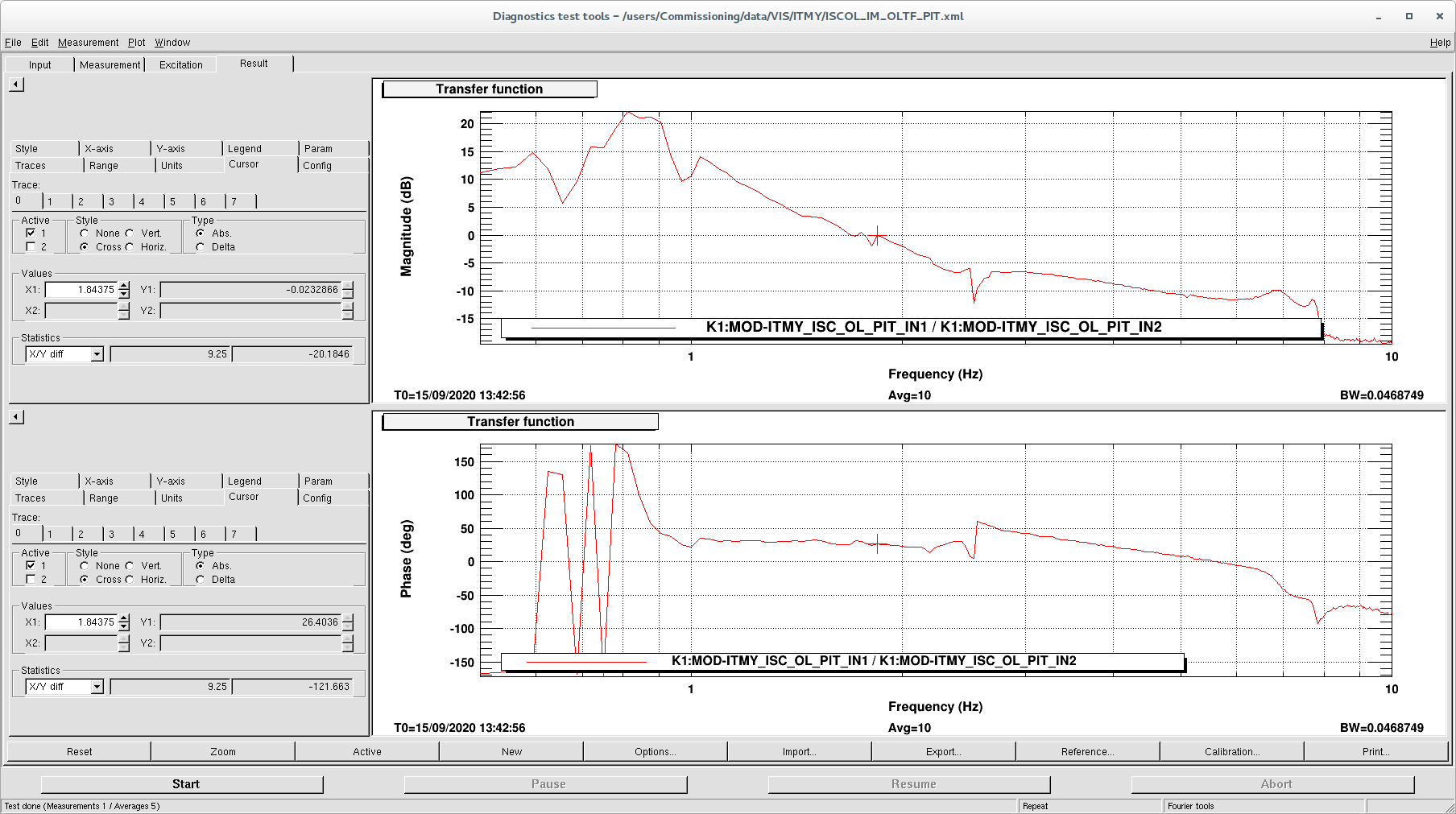
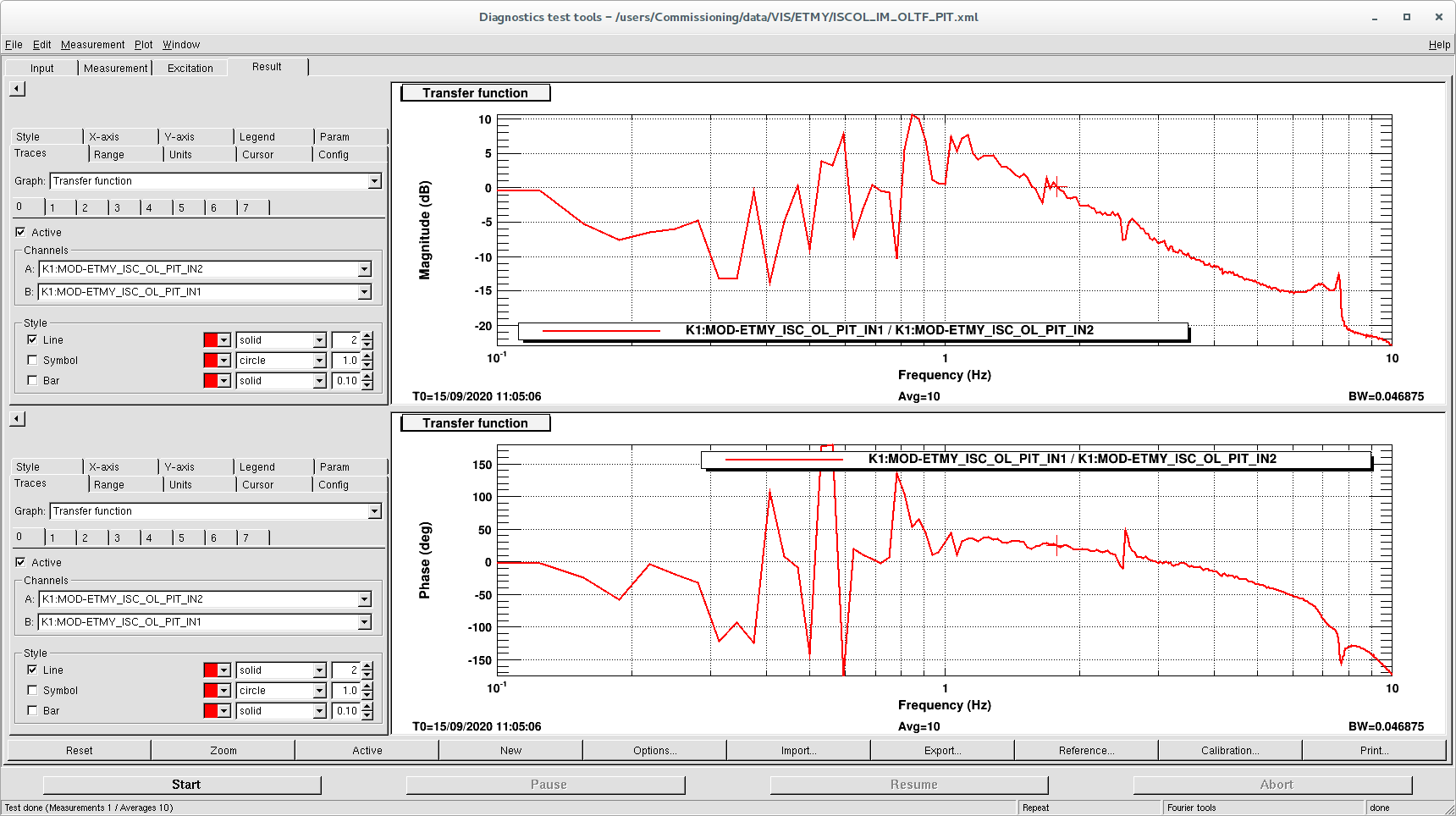
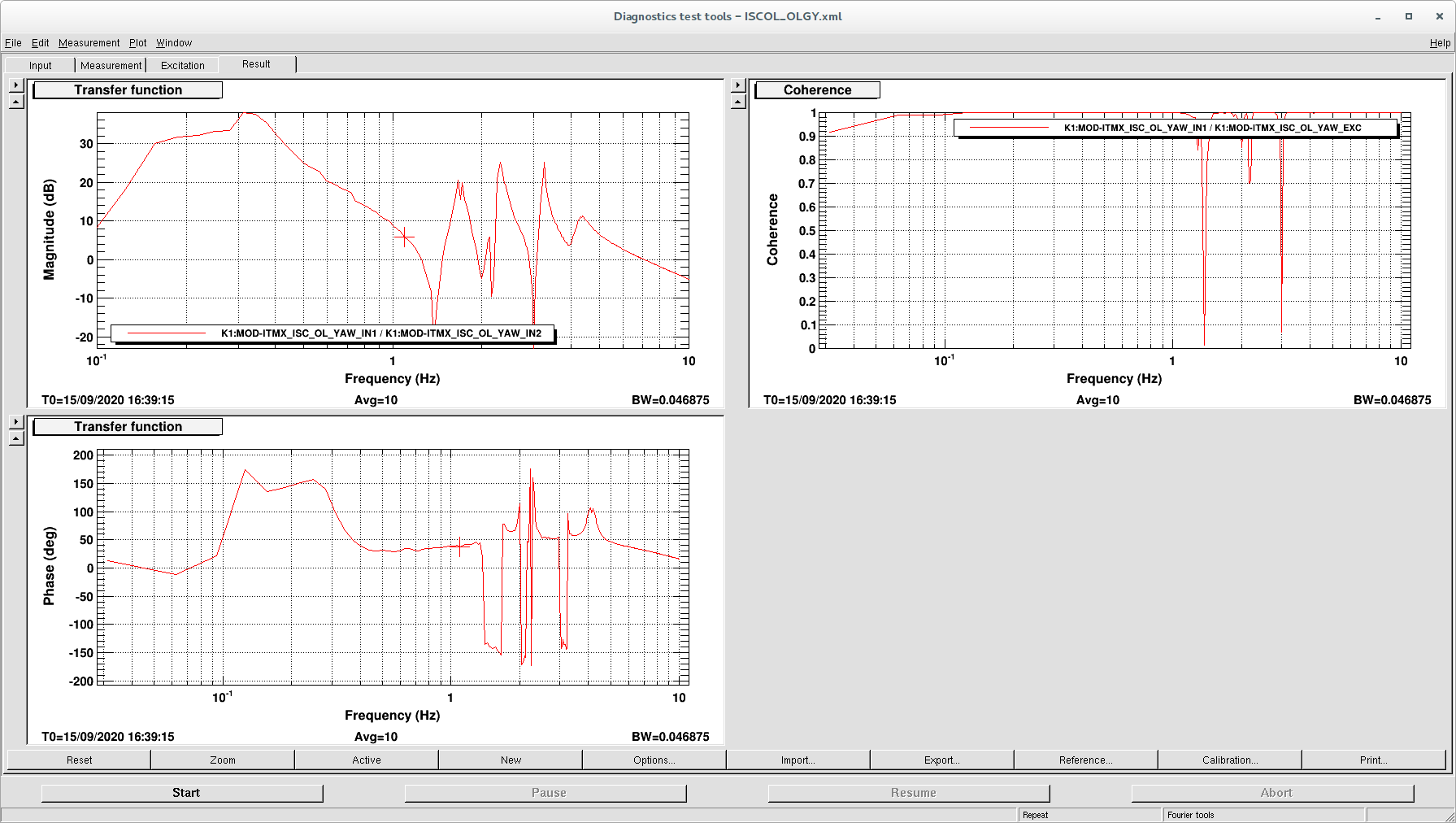
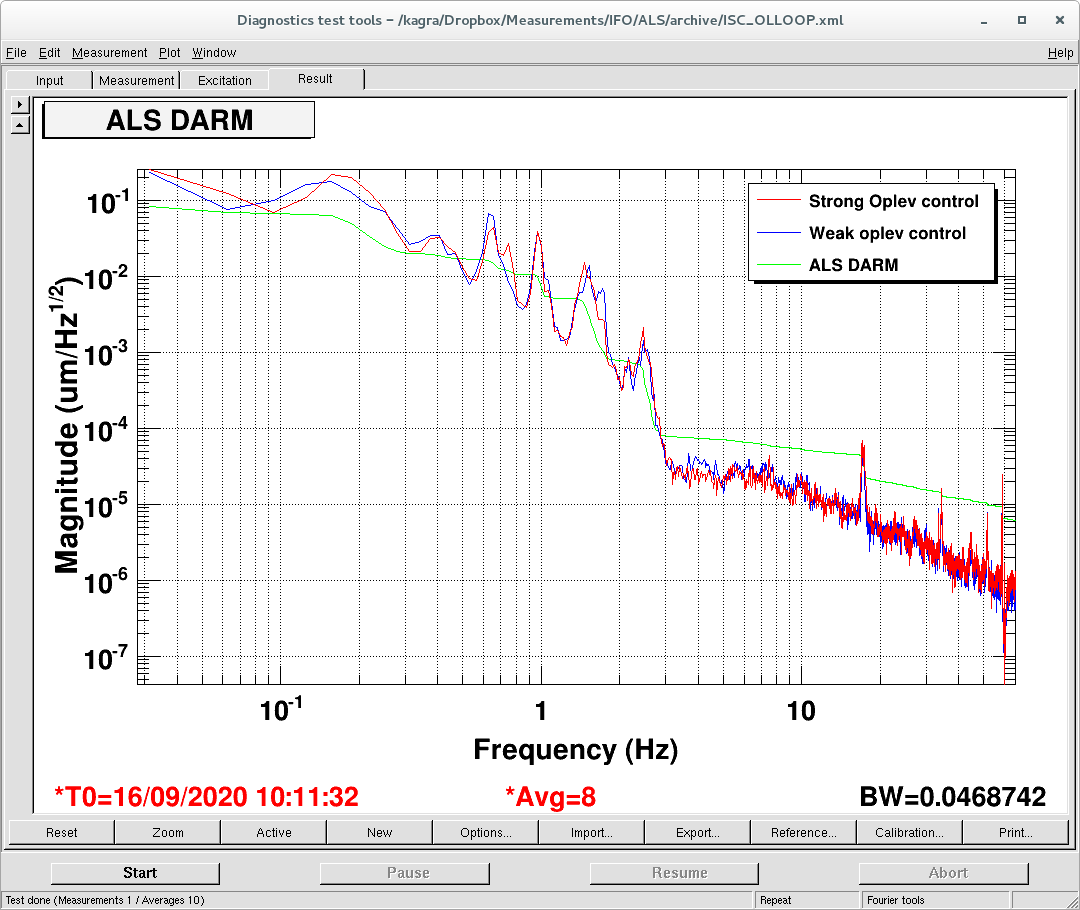
Oplev loop has been modified to have large gain below 0.5 Hz. We have done for ITMX pitch and ETMX pitch.
- UGF: 2 Hz
- Actuator: MN, IM(cross 0.5 Hz)
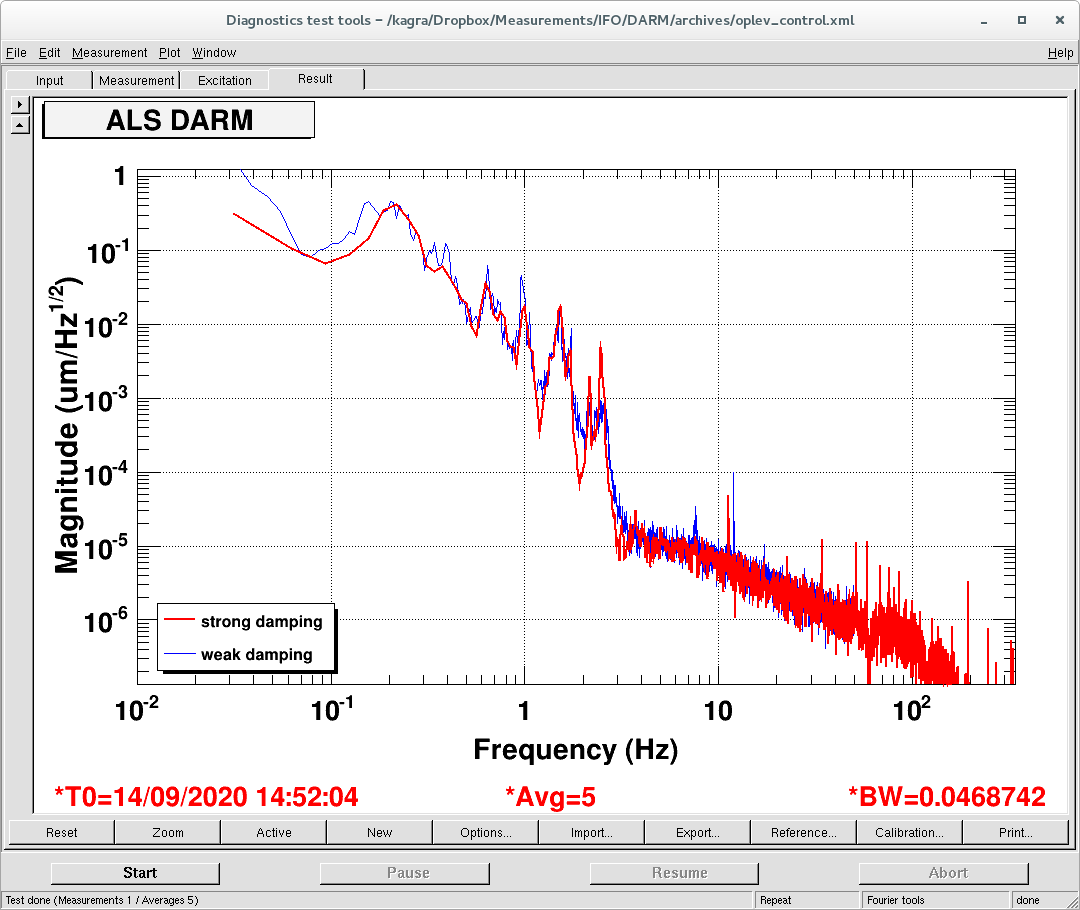
I checked that the pitch oplev loop does not contaminated the length motion by using the ALS DARM. As shown in the attached figure, the ALS DARM signal does not change with this new loop.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}