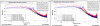
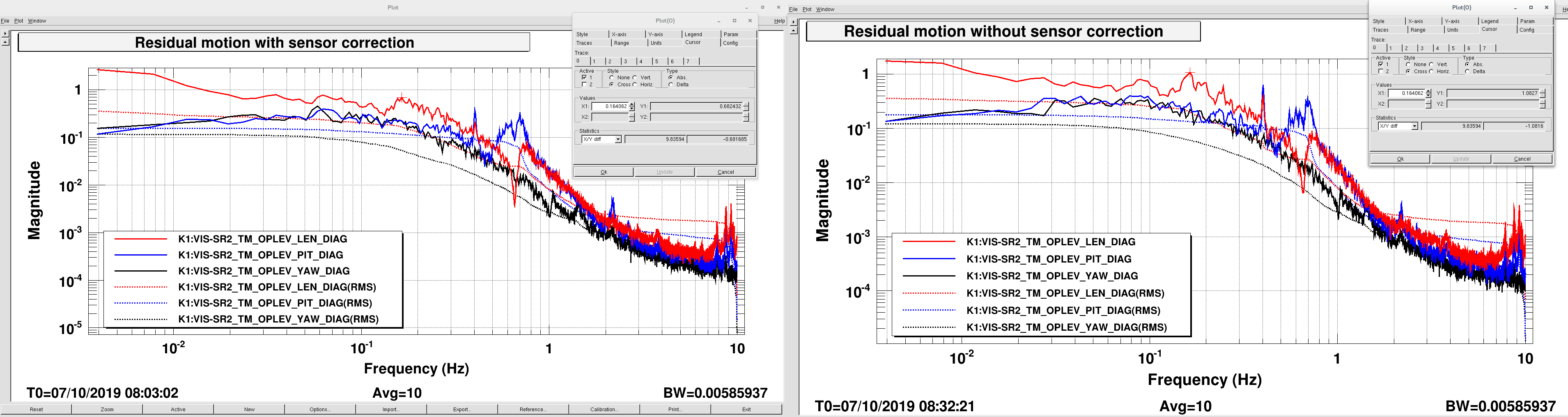
Having compared the measured transfer function with the model prediction I went ahead and implemented the sensor correction for IP longitudinal. I just added filters to the filter bank but I haven't test them yet because they are using the suspension for the main interferometer. The implementation for IP transverse will follow.
About the seismometer
-
Its signals are proportional to the velocity. Therefore, it requires an integrator in order to estimate the displacement. The filter name is "vel2disp".
-
The signals have an offset which is not compatible with the integrator.
-
The DC offset was removed with a 4th order Butterworth high-pass filter with a cutoff frequency of 0.5 mHz. The filter is called "DC_removal".
-
The seismometers we use are good above 40 mHz. We know this because Miyo-kun placed two seismometers of the same kind next to each other and there was no coherence below 40 mHz.
-
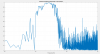
The components of the signal below 40 mHz are removed with a 2nd order elliptic high-pass filter with a cutoff frequency of 10 mHz, a 10 dB passband ripple and attenuation of 100 dB. The filter is caled "TF_GND2IP" (see below).
-
This implementation follows the X End suspension implementation.
About sensor correction
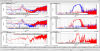
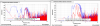
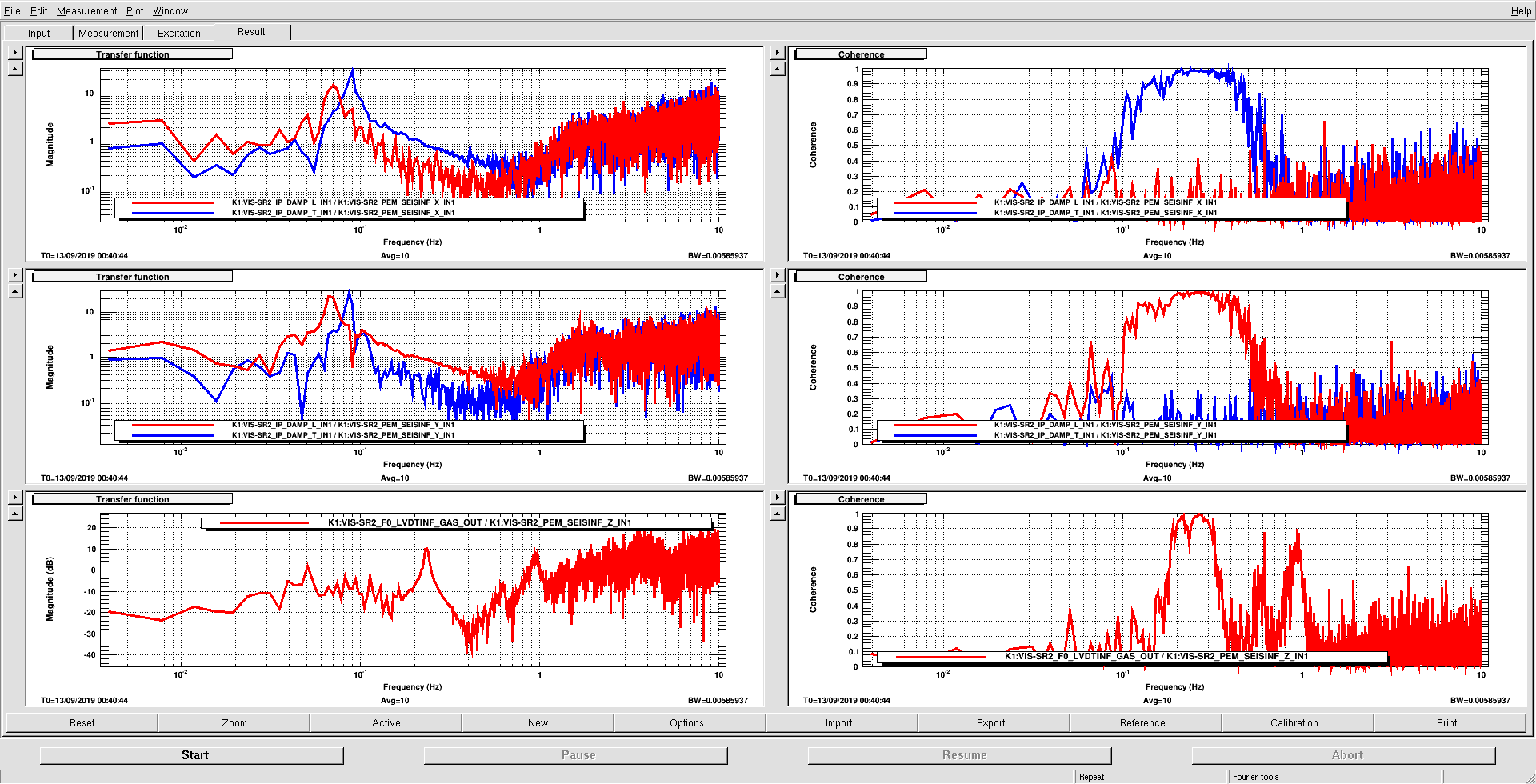
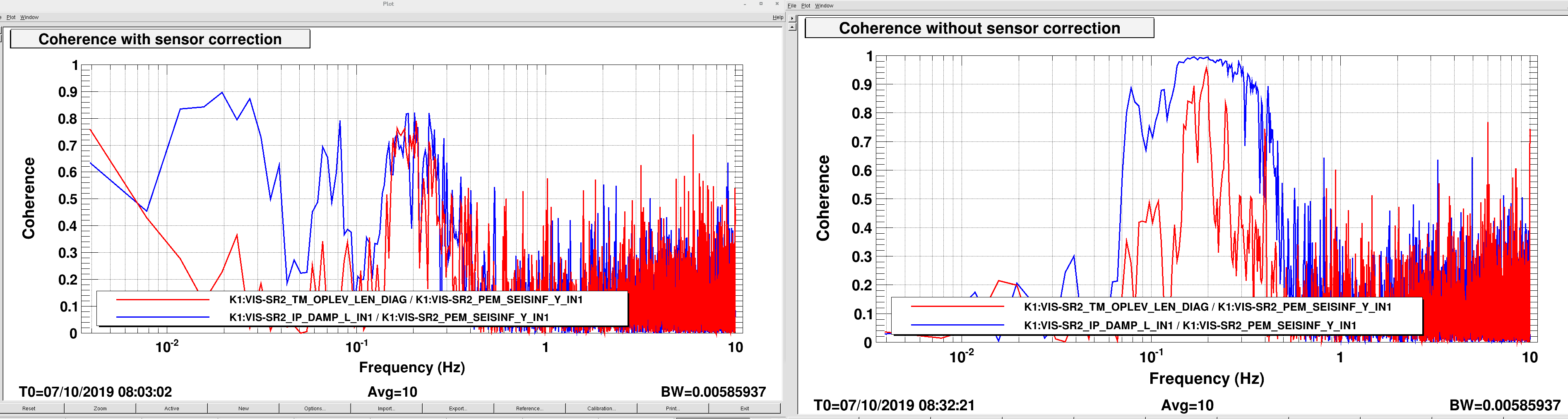
The amplitude of the ground motion is estimated by multiplying the seismometer signal (filtered as above) by the transfer function from the seismometer signal (along the Y arm) to the IP longitudinal. This operation is suitable only in those frequency bands in which the transfer function theoretically equals one. This happens in the region above the resonant frequencies, where the IP table does not move following the ground yielding the LVDT sensitive to the motion of the ground only. Although the transfer function equals to one in theory, in practice it does not because possible differences in the calibrations of the IP LVDT and seismometer, for example.
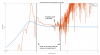
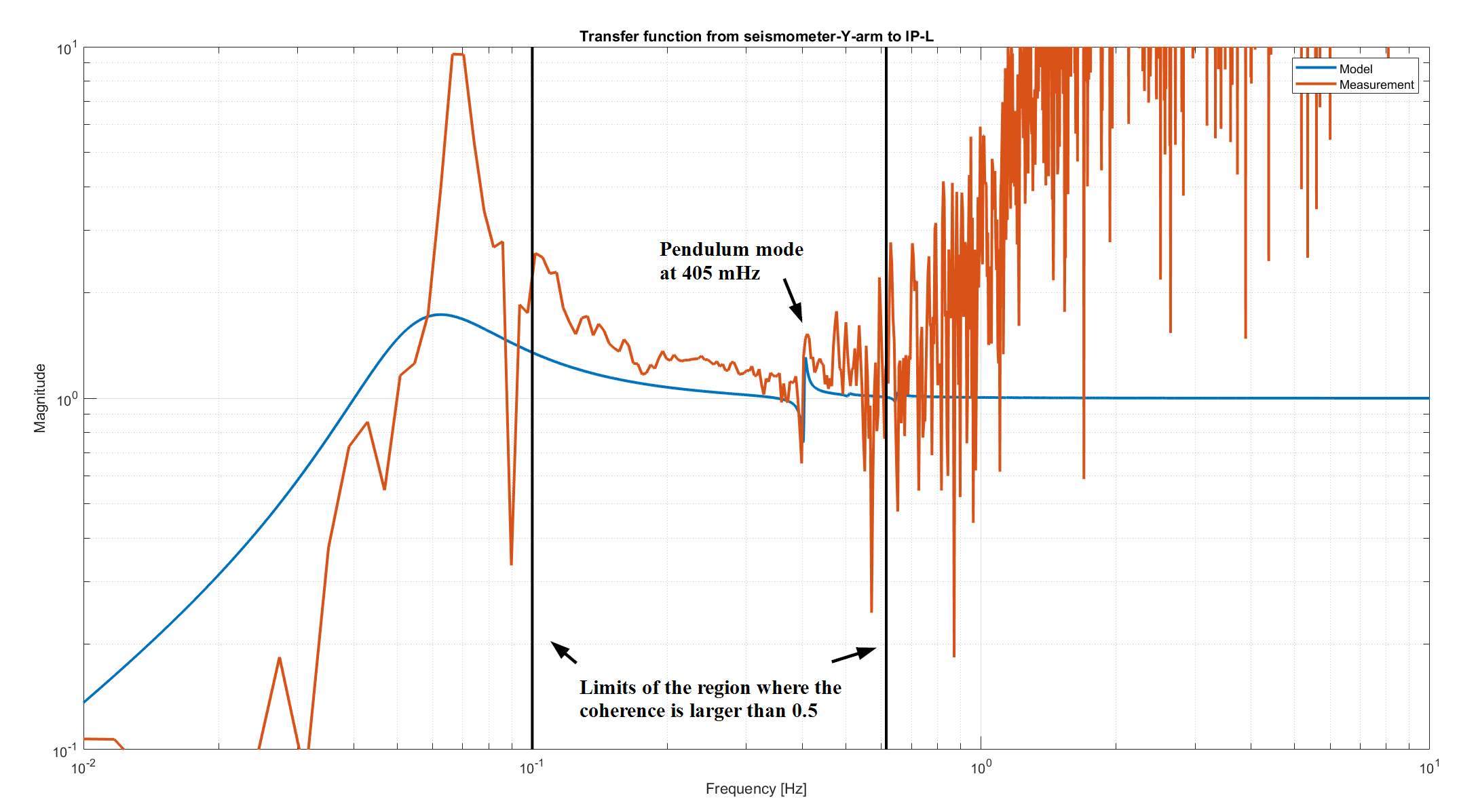
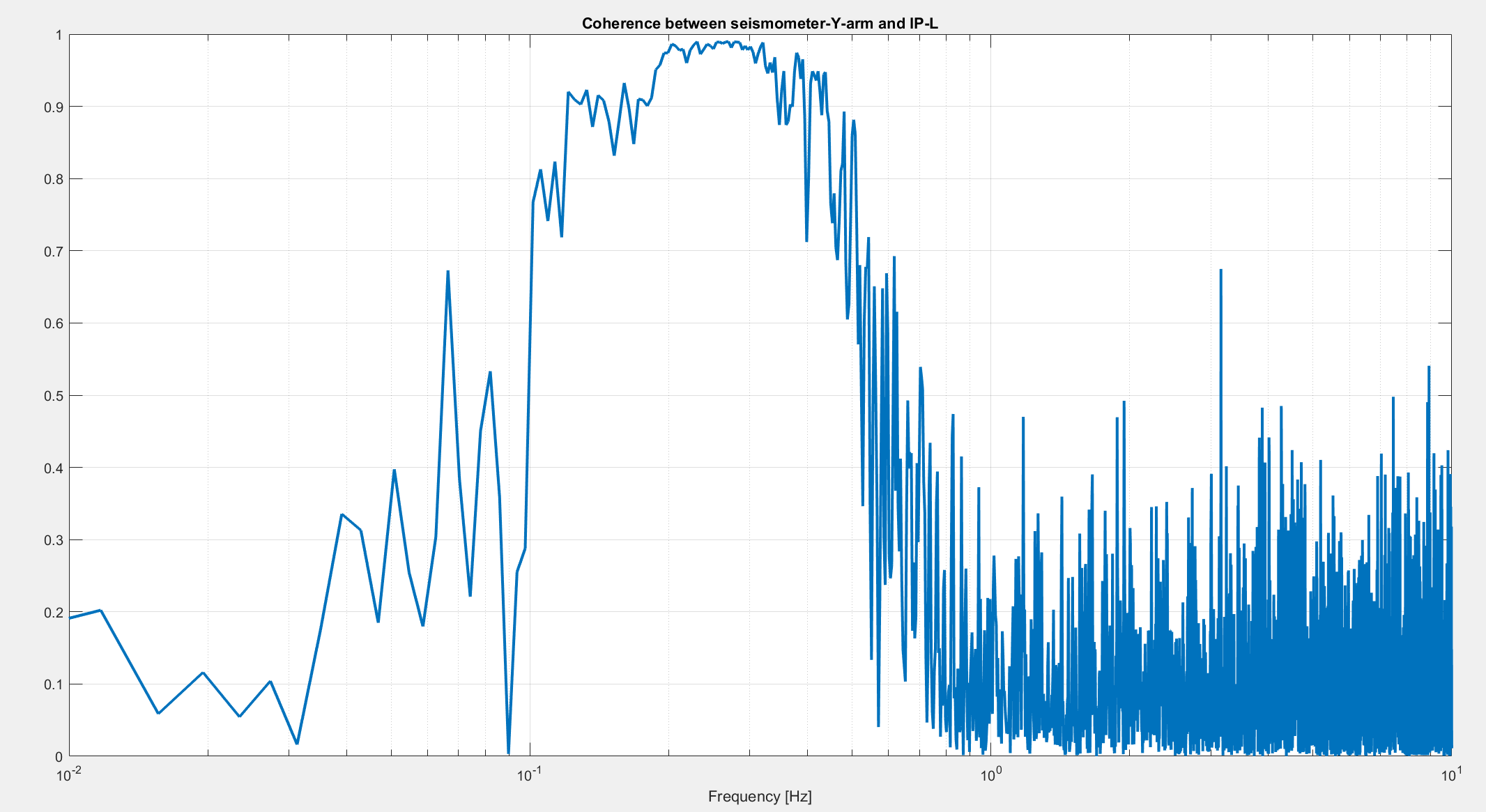
In the case of SR2 IP-L there is a resonant frequency at 405 mHz and the coherence is larger than 0.5 continously from 0.1 Hz to 0.515 Hz. From 0.515 Hz to 0.615 Hz the coherence is larger then 0.5 discontinously. Therefore, in order to calculate a value for the transfer function above the highest resonant frequency I consider only those data point between 0.515 Hz and 0.615 Hz whose coherence was larger than 0.5. The final estimate was the average of those values, which is 1.3530.
This value was implemented by adjusting the gain of the filter called "TF_GND2IP".
I will test performance whenever the suspension is available.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}