In case you don't see the pictures attached please click this link: 10877.
Yesterday I checked how well the sensor correction works.
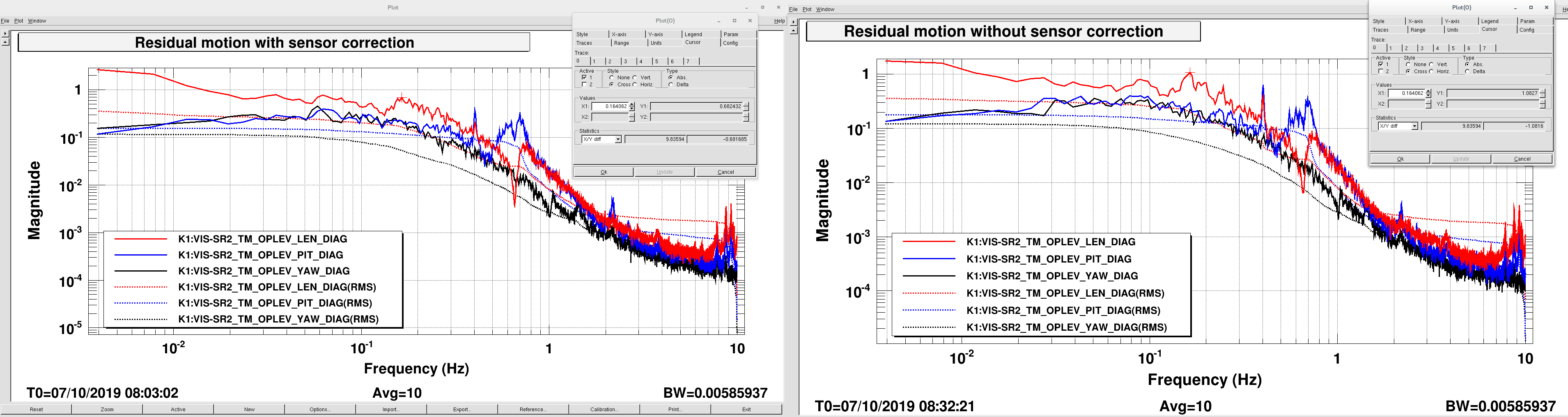
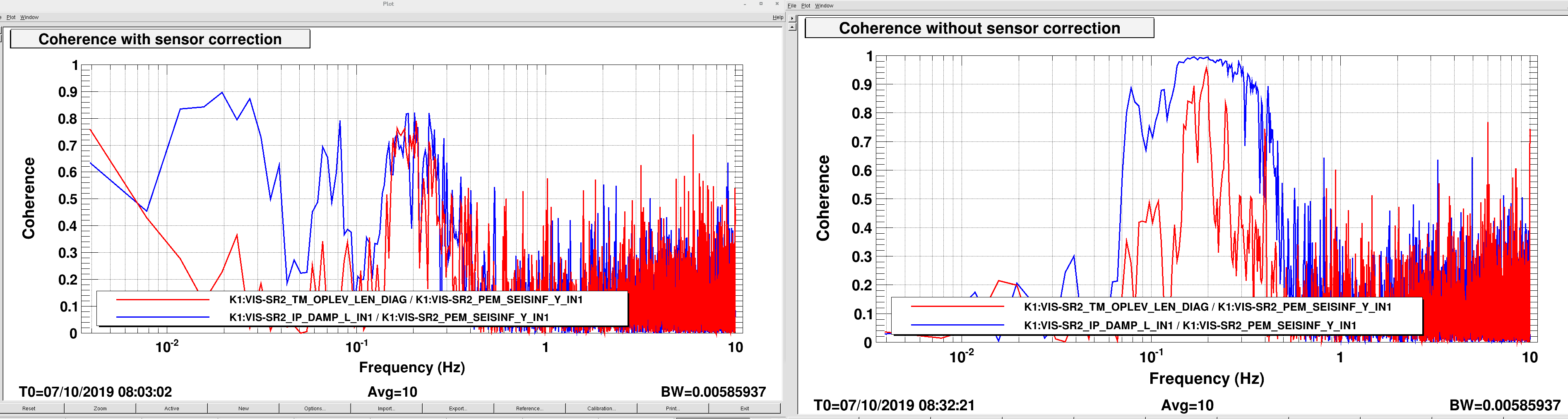
At the first attempt of measuring the residual motion of the mirror with the corrected sensor I realized that despite the amplitude decreased in the micro-seimic region, below 40 mHz the amplidude increased (as shown in the coherence plot below). Likely this is due to noise in the seismometer. In order to minimize this effect I put a notch at 14 mHz where there's a large bump in the high-pass filter which has the transfer function information. The filters are TF_GNDY2IPL and notch14mHz in filter bank SR2_PEM_SEISINF_X. A similar arrangement was done for the filters along IP-L.
Results
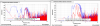
- Above 100 mHz there's a reduction of the residual motion of the mirror in TM-L. See the first picture. The highest value reduces from 1.08 um/rtHz to 0.68 um/rtHz, which is a 40% reduction.
- As pointed out above at lower frequencies (below 40 mHz) there's an increase of the residual motion, yielding an integrated RMS similar in both cases: about 0.35 um, which is below the requirement. See the second plot which is the coherence. Such an incresse is likely due to noise in the seismometer.
Files
Directory:
/kagra/Dropbox/Subsystems/VIS/TypeBData/SR2/TF/Measurements/20191007/
File names:
TF_seis2IPLVDT_20191007_no_correction.xml
TF_seis2IPLVDT_20191007_corrected.xml
{kind=link}
{kind=link}