Lucia, Yoshinori,
= ETMX =
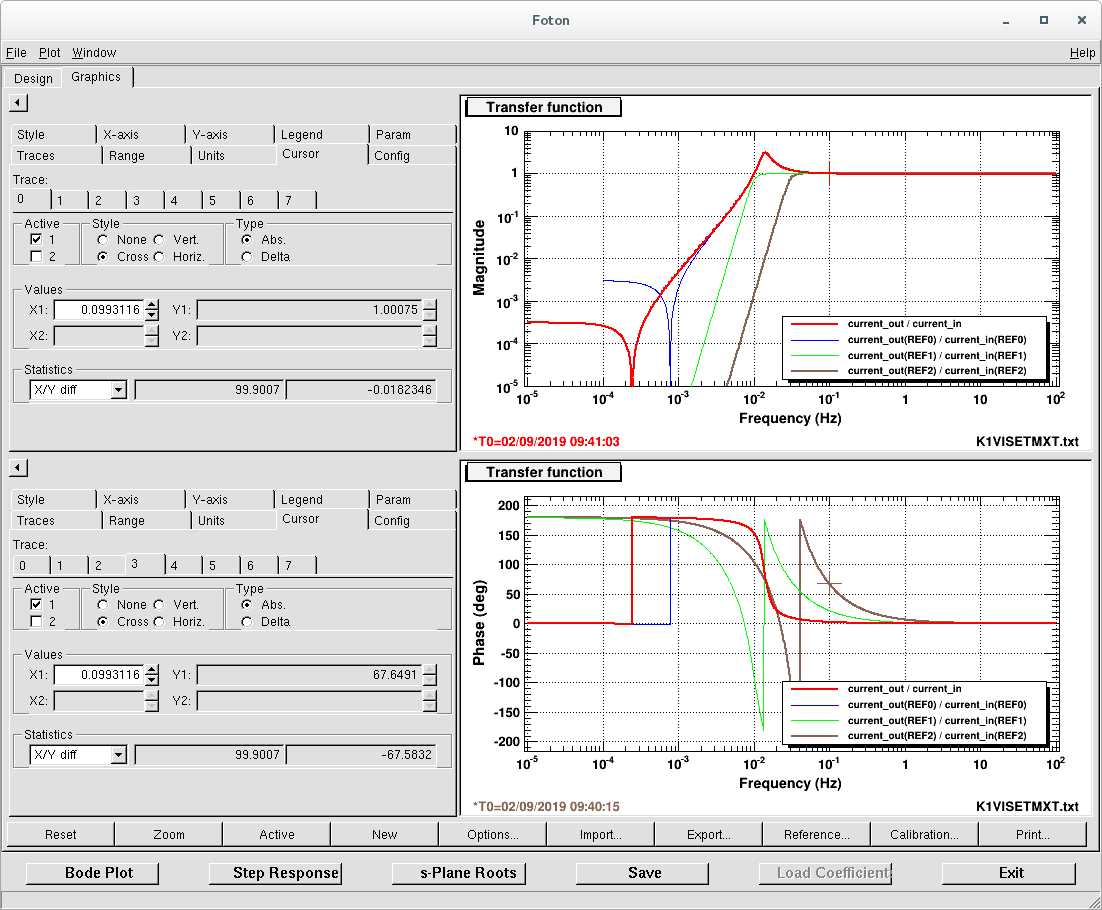
- We look for a better gain for the LVDT sensor correction, by finding a mimum of a function.
- So far, the sensor-correction-gains were set to 1 from just a simple guess.
- Then, we find the gains as following:
-
dof gain IP-L -0.715 IP-T -0.637 BF-L -1.51 BF-T -1.21
== what we did ==
-
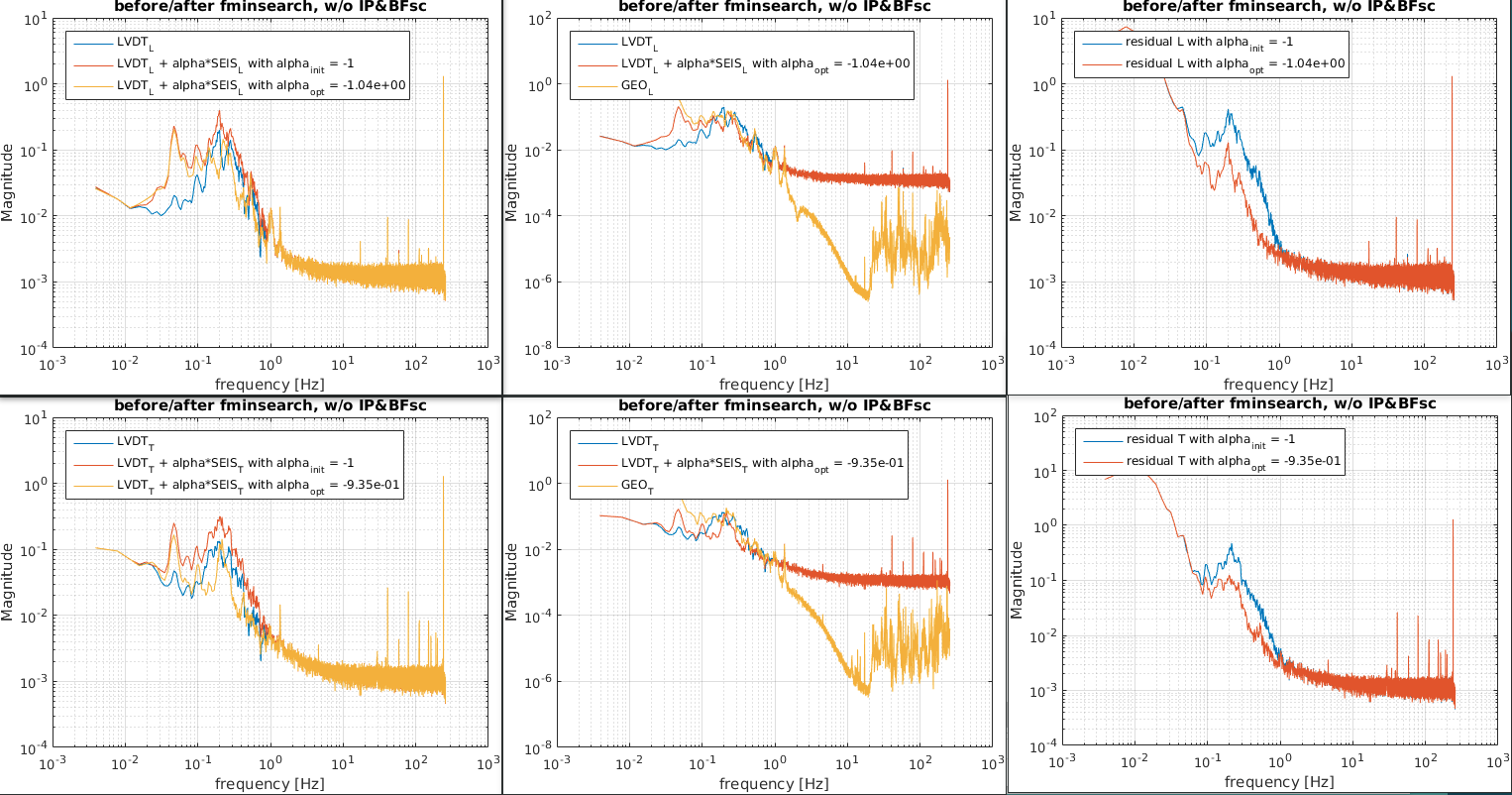
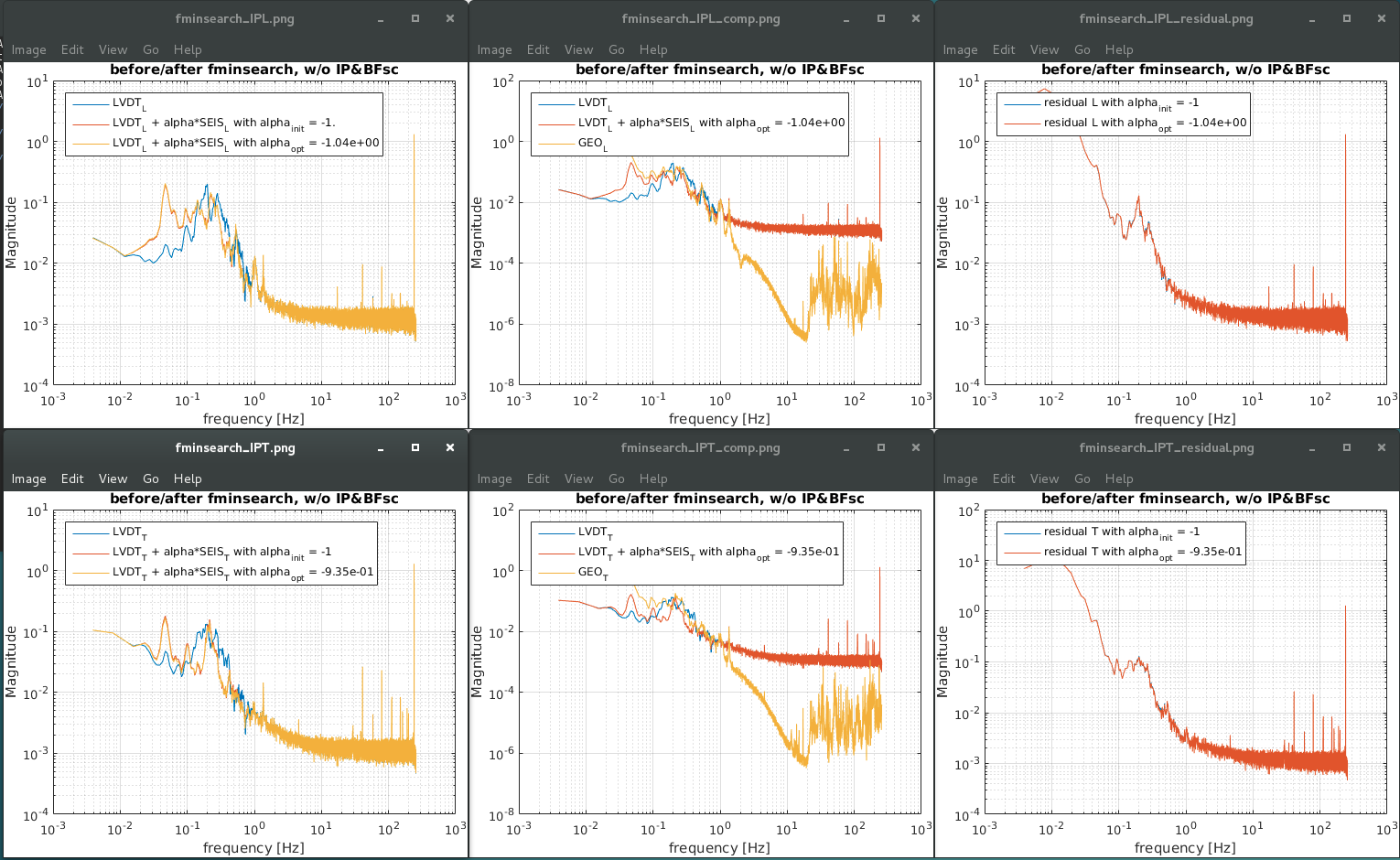
we looked for a mimum of the following function with a parameter, alpha:
- func = SUM( abs( FFT[ ( X_LVDT + alpha * X_SEIS ) ] )**2 ),
- where X_LVDT and X_SEIS are the time series data when the sensor correstion paths are opened. (w/ IP-dcdamp and BF-damp).
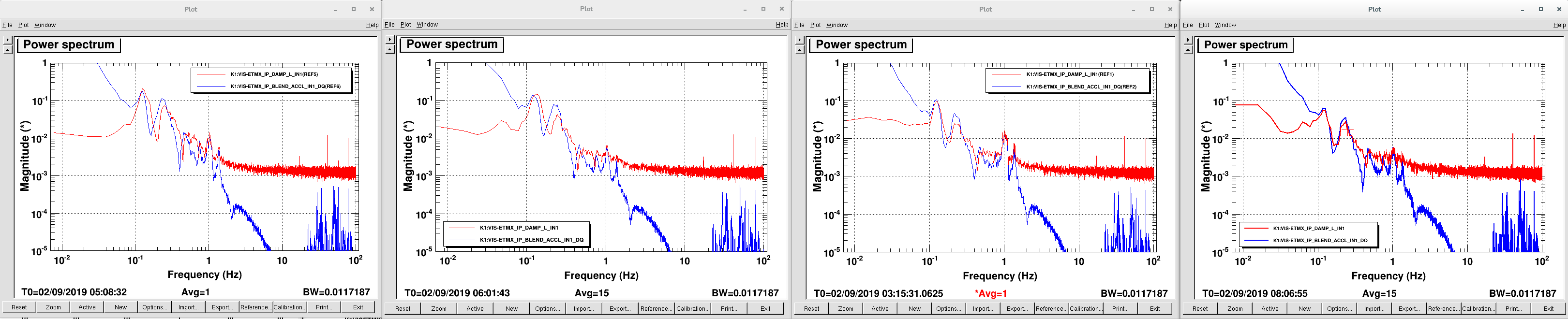
- In this investigation, a frequency band from 0.1 to 0.5 Hz was selected based on the coherence between the ground motion and the LVDT sensors.
- The corrected-LVDT spectra are attached with the estimated gain alpha (figure1 to 4).
-
They are not implemented to the MEDM screen yet. Some test is necessary before doing that.
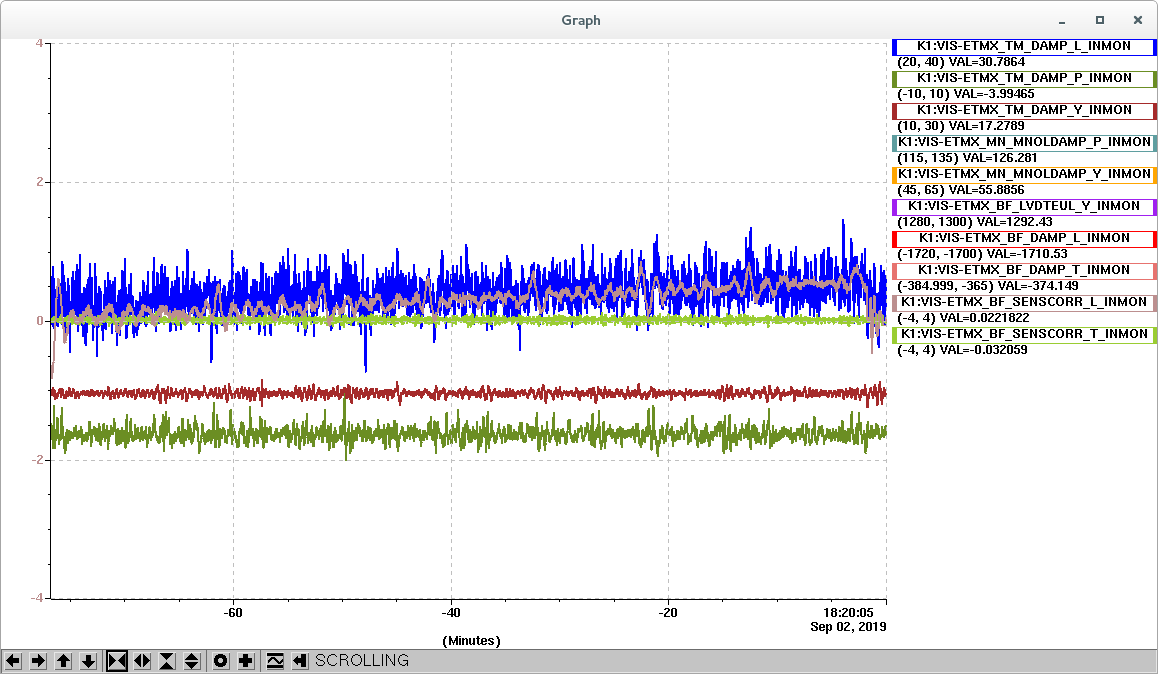
- It does not look there is difference between the config with gain -1 and with the optimized one, indeed (figure 5).
- The performane/improvement with the obtained gains will be checked more in detail for the next.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}