Koseki, Yoshinori,
-
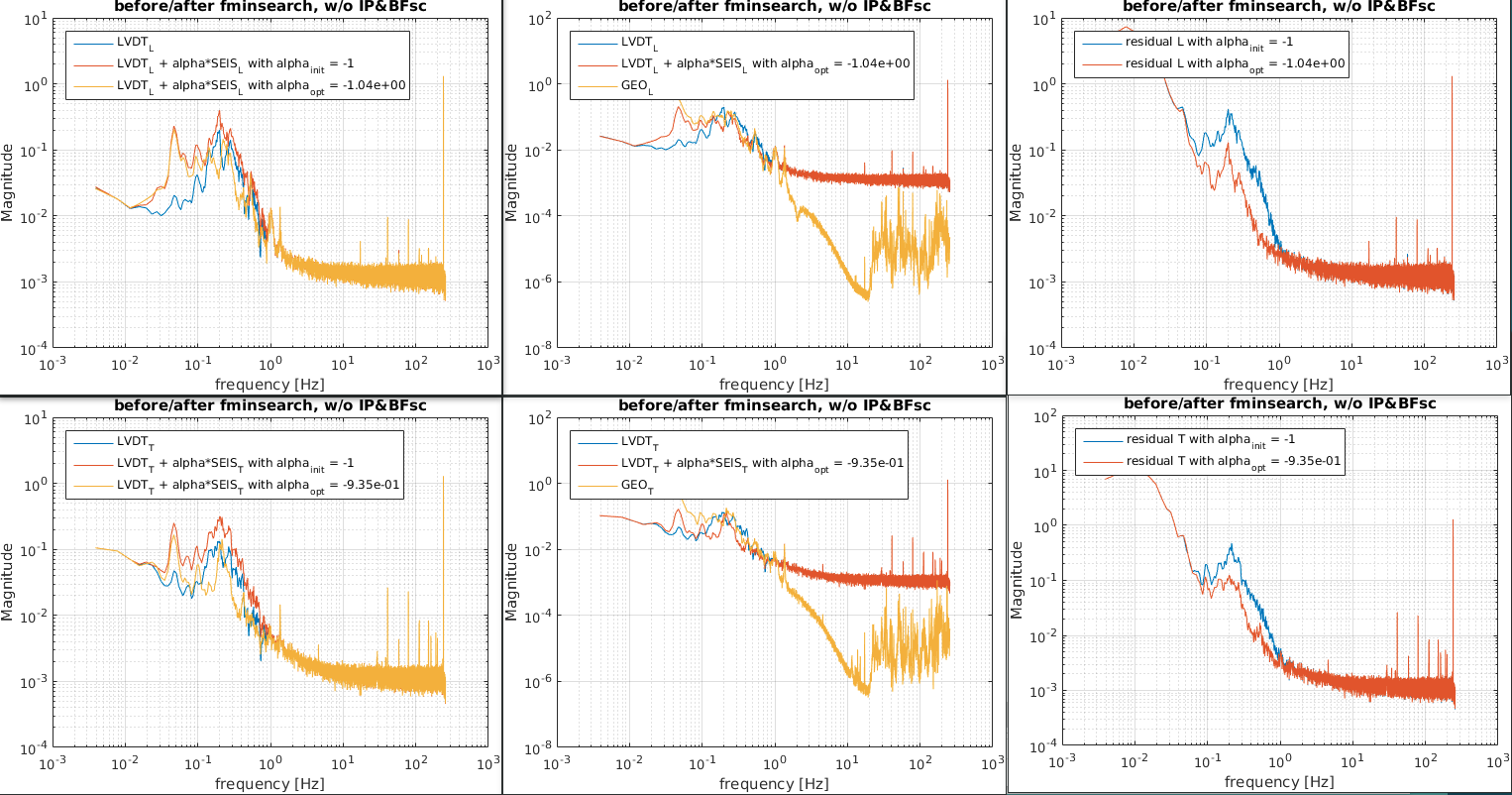
We found that the cost function I used was (X_LVDT + alpha*X_SEIS) not appropriate, and it seemed that it would be better to minimuize the following function:
- func = ( X_LVDT + alpha*X_SEIS - X_GEO )
- With the test, we obtained the following sensor correciton gain:
-
dof correctiob gain apha IPL -1.04 IPT -0.935 -
The attachement format is:
- LVDT: displacement signal between ground and IP
- SEIS: seismometer signal on the ground in dispacement
- GEO: veocity sensor signal of IP, converted to displacement
- residual = [ (LVDT + alpha*SEIS) - GEO ]
- performance confirmation will be done.
- Other reported follows.
- ref: /users/VIS/TypeA/ETMX/feedforwrding/gain_adjustment/test/

{kind=link}