[Tanaka, Ushiba, Aso, Komori]
Abstract:
We began testing a new DARM hierarchical control scheme using only the MN and TM stages to suppress the RMS of the TM feedback signal and enable control with the low-power coil driver.
The filter tested in this trial caused high-frequency saturation in the ALS DARM state; therefore, further investigation and redesign are required.
Detail:
As described in a series of previous trials (klog:33176), we need to implement a new DARM hierarchical control scheme in which the RMS of the TM feedback signal is sufficiently reduced to allow replacement of the current high-power coil driver with a low-power one.
This replacement is crucial because the noise of the high-power coil driver is already subdominant in O4c, and we must transition to the low-power driver to further improve the detector sensitivity.
We revisited the previous trials and adopted a new approach in this study.
Our new approach uses only the MN and TM stages, as this configuration avoids the IM stage, whose actuation path includes a negative zero.
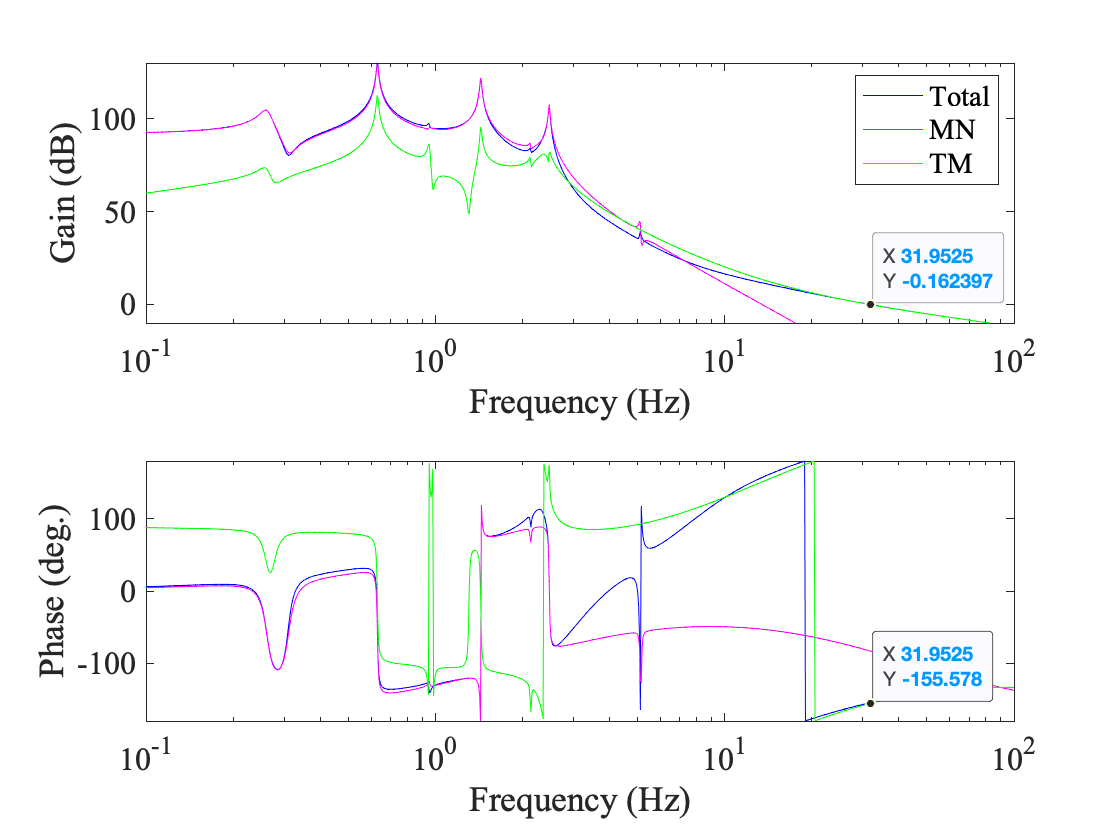
We designed a new open-loop transfer function using the MN and TM stages based on a theoretical multiple-pendulum model, as shown in Fig. 1.
The crossover frequency between the MN and TM stages is approximately 4 Hz.
Please note that the unity gain frequency (UGF) can be increased up to approximately 30 Hz at most, because the ALS DARM error signal is noisy and excessive bandwidth leads to saturation.
We successfully implemented the hierarchical transfer function as designed (Fig. 2).
However, we were unable to close the ALS DARM loop with this filter due to saturation at the MN stage.
The RMS of the current DARM feedback signal is dominated by noise around 30–40 Hz, as expected (Fig. 3).
The phase compensation filter, whose gain increases at higher frequencies, enhances the response in this band and leads to saturation around 30–40 Hz.
We will redesign the filter to mitigate this saturation in the near future.
In addition, another potential approach is to switch from the high-power coil driver with the conventional filter to the low-power driver with the new filter during the transition of the controlled TM between EX and EY after the handover to IR.
Since the IR signal is significantly quieter, we can maintain the UGF at around 100 Hz from the beginning.
This will make the implementation of the new filter more straightforward.



{kind=link}
{kind=link}
{kind=link}