[Tanaka, Dan, Sugioka, Komori]
Abstract:
We have started a trial to increase the ASC bandwidth in order to reduce power fluctuations inside the arm cavities, which can mitigate non-stationary and non-linear noises in the interferometer.
The first target is the DHARD pitch loop, for which we aim to increase the unity gain frequency (UGF) up to a few hertz, although this has not been succeeded yet.
Details:
We have been observing non-stationary noise and likely non-linear noise around 100 Hz in KAGRA, which must be addressed to achieve better sensitivity.
One possible cause is the large fluctuation of the arm transmission power, exceeding 1%, whereas it is typically 0.01–0.1% in LIGO.
In addition, the ASC bandwidth of the arm cavities in LIGO is 4–5 Hz, while that in KAGRA is only around 0.5 Hz.
Since the ASC control noise coupled into DARM is much smaller than the current sensitivity, we can increase the ASC bandwidth to significantly reduce the transmission power fluctuations.
The first target is DHARD pitch.
The pitch resonant frequencies of the MN, IM, and TM are 0.8 Hz, 45 Hz, and 7.5 Hz, respectively.
Therefore, within an ASC bandwidth of a few hertz, these three masses can be regarded as a single effective pendulum, making it relatively straightforward to increase the UGF.
As a first step, we designed a new filter for higher-bandwidth operation using a simple phase compensation filter.
Another important concept of the new ASC scheme is that the feedback is applied only to the MN, and not to the TM, in order to avoid noise contamination.
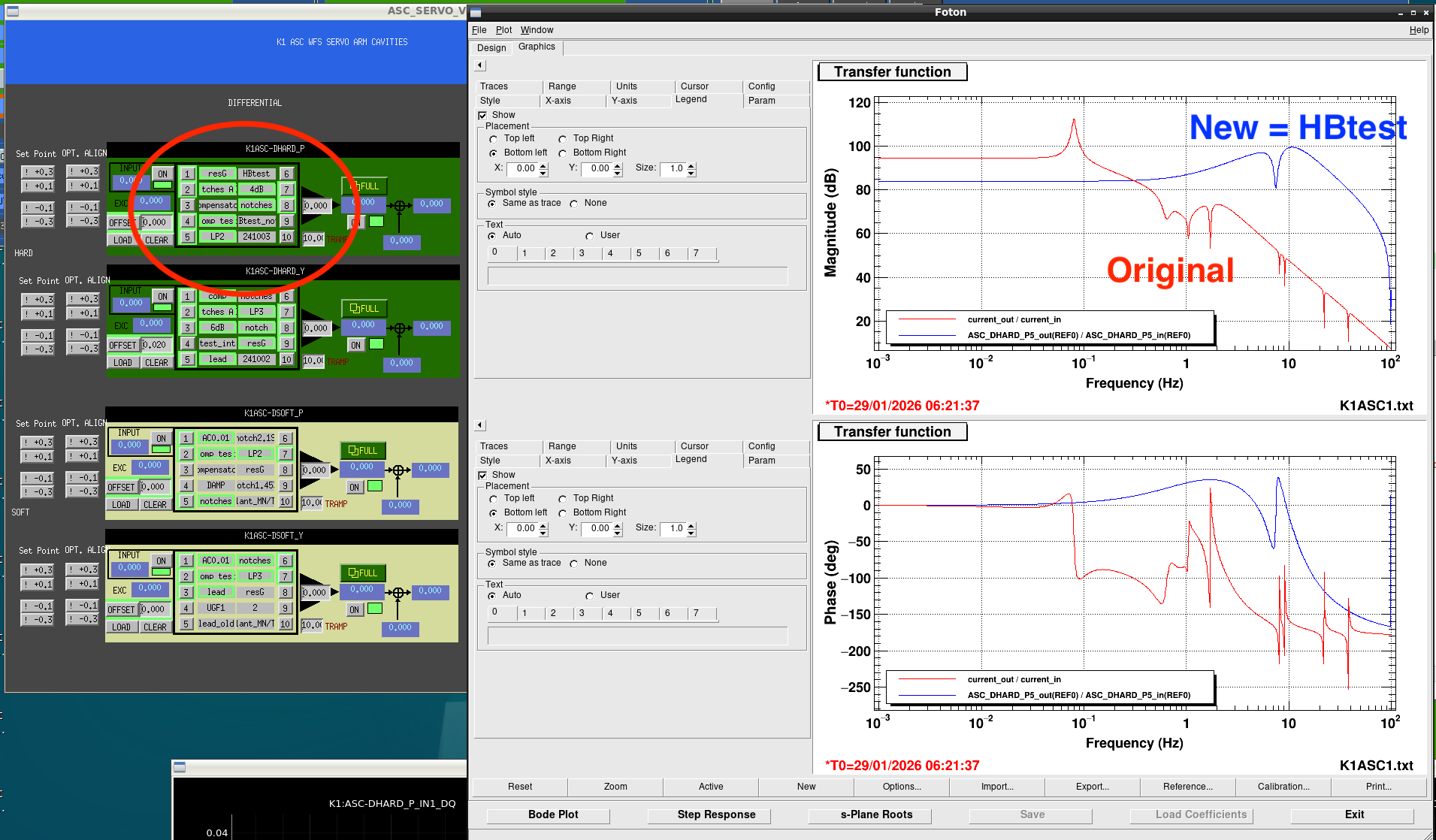
The expected openloop transfer functions are plotted in Fig. 1, where the blue and red curves correspond to the current and targeted designs, respectively.
Although the loop has not yet been fully optimized, the new design achieves a UGF of approximately 2 Hz.
We implemented this new filter through the following steps:
-
Reducing the {D, C}{HARD, SOFT} gains from −1 to 0.3 to decrease the ASC UGF from 0.3–0.5 Hz to around 0.1 Hz, ensuring that the UGF is below the crossover frequency between the MN and TM (0.1 Hz).
-
Turning off the TM LOCK filter and configuring the ASC to actuate only on the MN.
-
Turning off the DHARD pitch control, replacing the old filter with the newly designed one, and re-enabling the control.
We successfully closed the DHARD pitch loop with the new filter and measured the openloop transfer function, shown by the red dots in Fig. 2, which can be compared with the conventional loop shown by the blue dots.
However, the achieved UGF is still low, and an oscillation at 0.8 Hz appeared when we increased the gain further.
We will investigate the origin of this instability in more detail.
In addition, the coupling between DHARD and CHARD appears to be significant, so improving the decoupling between these degrees of freedom is another important task.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}