I have updated the Noise Budgetter thanks to the feedback from Michimura-kun.
* Plot configuration including the GPS information will be saved in the csv file.
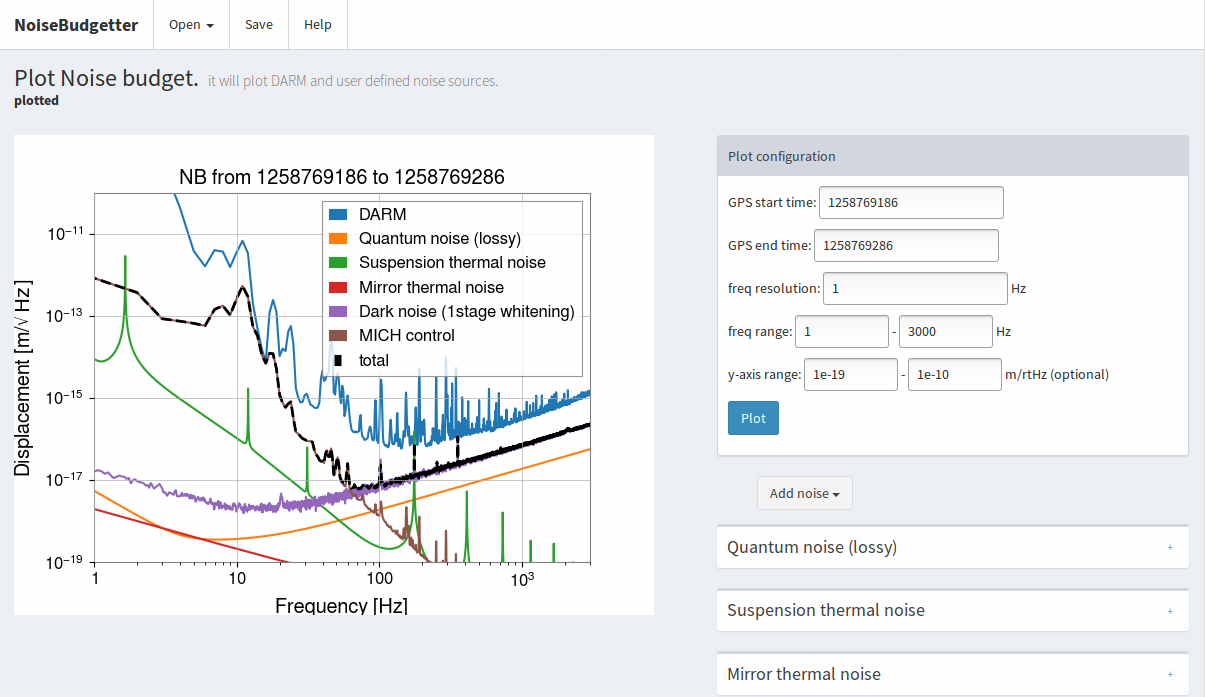
* You can specify y-axis range.
* You can multiply transfer function and theoretical line together.

{kind=link}