After the investigation and the recovery of the ETMY suspension, today I started to work on the IP actuator diagonalization.
Here I report the informations about the ETMY diagonalization of the LVDT, acuators and IP position loops.
As reported in klog 7468, in the interferometer reference frame [X,Y], the position of each sensor is:
- H1: a1=174 degree,
- H3 : a3=294
- H2 : a2=54.
The projection of any horizontal motion of the Preisolator (with components L, T, Yaw) on each horizontal LVDT is
H_1 = -L* cos (a1) -T *sin (a1) + R_h*Yaw
H_2 = -L* cos (a2) -T *sin (a2) + R_h*Yaw
H_3 = -L* cos(a3) -T *sin (a3) + R_h*Yaw
where R_h is the distance from the LVDT to the PI center (0.5940 m).
and the sensing matrix will be its inverse: S^-1
| H1 | H2 | H3 | |
| 0.6630 | -0.3919 | -0.2712 | L |
| -0.0697 | -0.5393 | 0.6090 | T |
| 0.5612 | 0.5612 | 0.5612 |
Yaw |
ETMY IP driving matrix:
According to the entry 6118, to built the diagonalized virtual actuators, I injected a line at 2 Hz for each coil:
new driving matrix (@2Hz):
| L | T | Yaw | |
| -2.4887 | 0.2149 | -0.6127 | H1 |
| 1.4549 | 1.949 | -0.5803 | H2 |
| 1.01180 | -2.1816 | -0.5896 |
H3 |
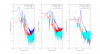
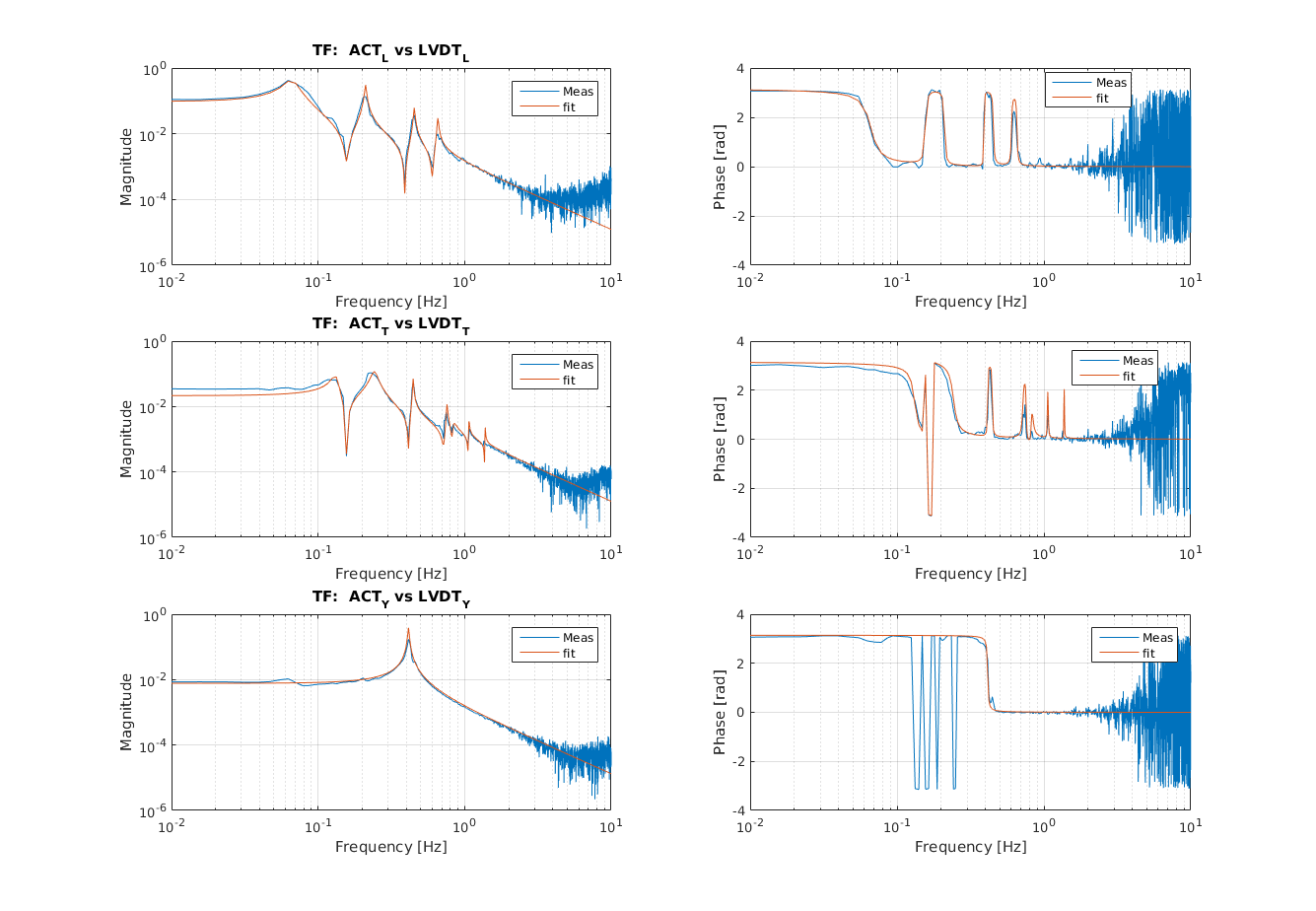
After diagonalizing the LVDT sensing and the driving, I measured again the IP TF (see Pic1) for each d.o.fs and I estimated the coupling as function of the frequency (see Pic2):
1) we can see that the mechanical couplings are very low (Pic2)
2) The IP mode along L is at 0.066 Hz (Pic1)
3) The IP mode along T is at 0.132 Hz (Pic1)
4) The IP mode along Y is at 0.4 Hz (Pic1)
I also implemented a position control loop for the longitudinal, transverse and yaw motion of the IP and I have also verified that it is to move fast and smoothly all the three d.o.fs, by adding a offset.
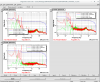
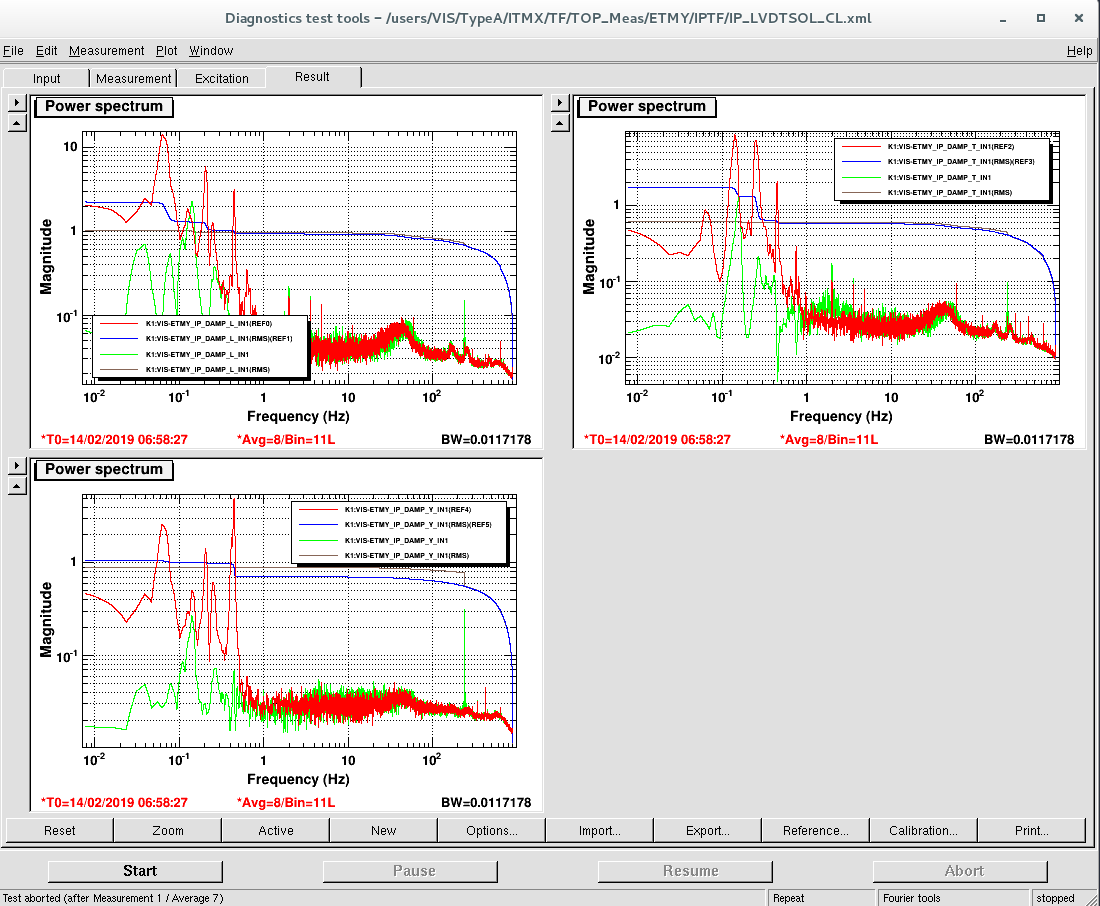
Pic3 show the fit of the diagonal TF for each d.o.fs and Pic 4 show the spectra of L,T,Y d.o.fs and respective rms when the position control loops are open (red curve) and closed (green curve).
LONGITUDINAL
Mechanical TF (Fit)
| Freq | Q | Pole or zero |
| 0.0663 | 5 | pole |
| 0.156 | 30 | zero |
| 0.2107 | 40 | pole |
| 0.3906 | 140 | zero |
| 0.4531 | 50 | pole |
| 0.6016 | 50 | zero |
| 0.6562 | 50 | pole |
| gain=-0.1190 | freq_gain=0.0310 Hz |
Corrector filter
| Freq | Q | pole/zero |
| 0.001 Hz | real | pole |
| 0.06 Hz | 0.5 | zero |
| 5 Hz | 0.7 | pole |
| 8 Hz | 0.7 | pole |
UGF = 0.111 Hz (first cross) phase margin= 41deg
TRANSVERSE
Mechanical TF (Fit)
| Freq | Q | pole/zero |
| 0.132 | 10 | pole |
| 0.156 | 380 | zero |
| 0.2422 | 10 | pole |
| 0.4141 | 100 | zero |
| 0.4453 | 80 | pole |
| 0.7188 | 30 | zero |
| 0.7578 | 60 | pole |
| 0.8203 | 40 | zero |
| 0.8359 | 40 | pole |
| 1.055 | 100 | zero |
| 1.07 | 90 | pole |
| 1.3670 | 200 | zero |
| 1.38 | 150 | pole |
| GAIN = 0.00034 | freq_gain= 2Hz | |
GAIN = 0.00029 @ 2 Hz
Corrector filter
| Freq | Q | pole/zero |
| 0.001 Hz | real | pole |
| 0.1 Hz | 0.5 | zero |
| 5 Hz | 0.7 | pole |
| 8 Hz | 0.7 | pole |
UGF = 0.149 Hz (first cross) phase margin= 38deg
YAW
Mechanical TF (Fit)
| Freq | Q | pole/zero |
| 0.4141 | 50 | pole |
| Gain=-0.0078 | freq_gain=0.039 |
Corrector filter
| Freq | Q | pole/zero |
| 0.001 | real | pole |
| 0.35 | real | zero |
| 0.4 | 0.5 | zero |
| 5 | 0.7 | pole |
| 8 | 0.7 | pole |
UGF = 0.320 Hz (first cross) phase margin= 163deg
Note that the three mechanical TFs have been also copied in photon as 'SUSMod', to make easier the adjustment of the loop parameters.


{kind=link}
{kind=link}
{kind=link}
{kind=link}