Today,
Calibration data:
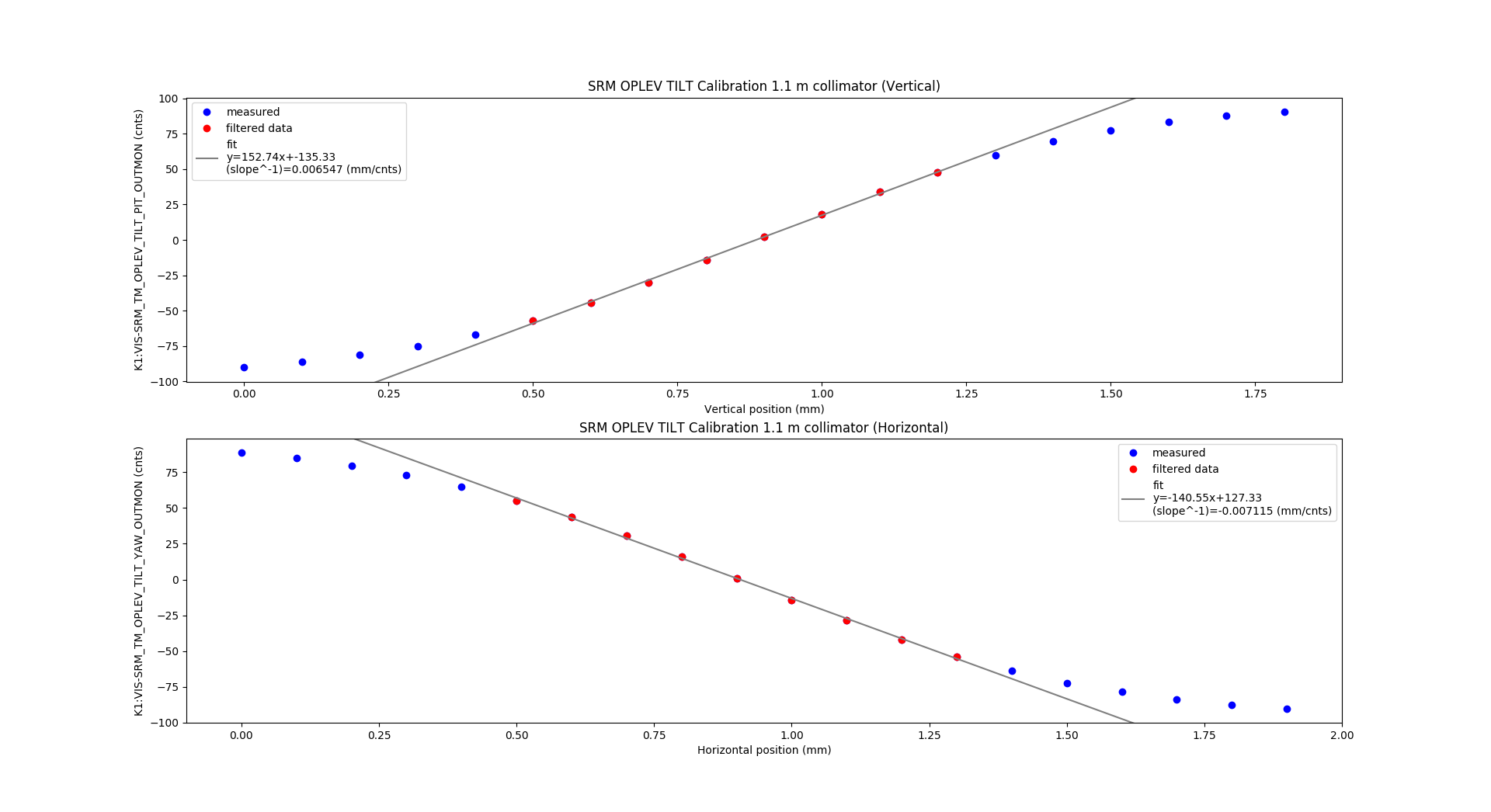
K1:VIS-SRM_TM_OPLEV_TILT_PIT_OUTPUT: [-90.2,-86.3,-81.4,-75.1,-67.1,-56.8,-44.3,-30.1,-14.5,2.1,18.1,33.9,47.6,59.6,69.6,77.2,83.3,87.7,90.7]
K1:VIS-SRM_TM_OPLEV_TILT_YAW_OUTPUT: [88.7,85.1,79.5,73.1,64.8,55.2,43.9,30.5,15.9,0.97,-14.3,-28.6,-42.0,-54.1,-63.6,-72.4,-78.5,-83.7,-87.6,-90.2]
data were measured with an average of 5 seconds and with a step of 0.1 mm QPD vertical/horizontal displacement.
the calibration plot was shown in the attached photo srmtmoplevtiltcal.png
using data from 7952, the calculated linear range of the sensor is ±226 µrad for pitch and ±309 µrad for yaw.
Using the calibration factors shown in the figure (0.006547 mm/cnts for pitch and 0.007115 mm/cnts for yaw), the roughly diagonalized OL2EUL matrix is:
| TILT_PIT | TILT_YAW | |
| P | 2.26226676 | |
| Y | 3.07438047 |
I implemented the matrix into the MEDM and took a snapshot.

{kind=link}