Yesterday I performed the calibration of the accelerometers on the ITMX IP, and after that I measured and implemented the related sensing matrix. We remind that also the accelerometers are arranged in a plane geometry, on the vertices of an equilateral triangle (120 degrees between each to other and far from the center of IP r=0.5592 m).
Here some details of this work are reported.
=Accelerometers calibration=
One way to do this calibration is to move the IP along the Yaw degree of freedom by injecting white noise and measure the transfer function: TF_yaw_acc_i= (Yaw_lvdt*r)./(acc_i)/(2*pi*f)^2 ) (where i=1,2,3);
Since the Yaw is an isotropic motion I expect that the accelerometers read the same signal, that is: the functions TF_yaw_acc_i must be equals. If this happens the sensors are calibrated, otherwise we have to calibrate them.
For the ITMX I did this operation:
- In Fig1 is shown the TF_yaw_acc_i before the calibration: we see that these responses are different each others.
At 0.5 these transfer functions assume the values reported below:
|
calH1 at 0.5 Hz |
2.16 |
|
calH2 at 0.5 Hz |
2.54 |
|
calH3 at 0.5 Hz |
2.41 |
These values represent the calibration factors that we have to use to equalize the response between the accelerometers and LVDTs.
I uploted these new calibration factors in the MEDM screen and measured agin the TF_yaw_acc_i:
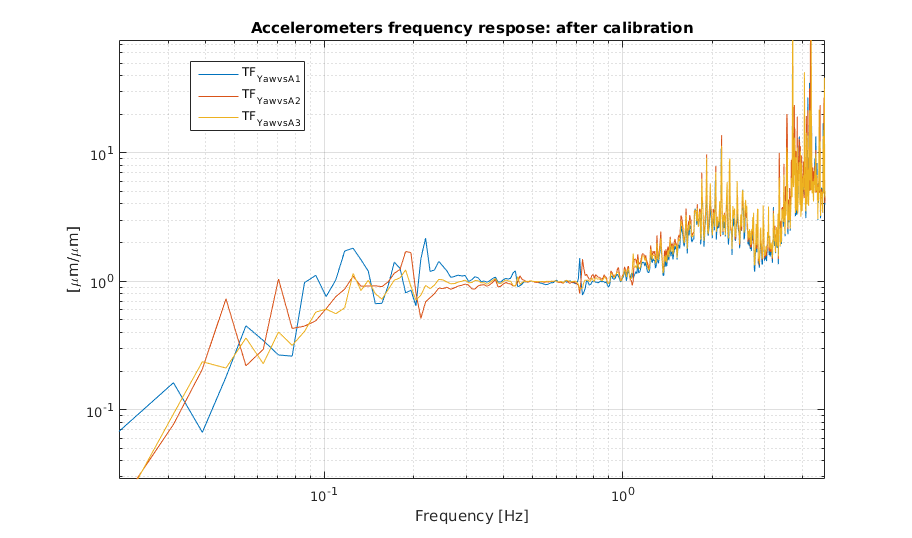
- In Fig2 is shown the TF_yaw_acc_i after the calibration: we see that these responses are equal.
=Accelerometers sensing matrix=
To built the diagonalized virtual accelerometers I chosen to measure the sensing matrix referring at the readout of the diagonalized virtual sensors (L,T,Yaw). This measurement is done by injecting a line at with frequency f0 from each Virtual diagonalized actuator [CoilL, CoilT, CoilY] and by measuring module and phase of the transfer function between the j-th inertial sensor (in this case accelerometer) and the diagonalized LVDTs i=[L ,T ,Yaw]: TFji=(Acc_j/L_i)/(2*pi*f0)^2
In this way it is possible to measure the amplitude of the response (module) and the sign(TF phase) that each real inertial sensor has when we move only along the selected degree of freedom . These numbers are stored for column in a matrix S whose the inverse is the sensing matrix. A crucial point for the measurement of these matrices is the choice of the frequency f0. We reminde that we have to monitor very small displacements in low frequency region (below 3 Hz), where the inertial sensor must have a good response. Looking at the frequency response (see Fig2) we see that the accelerometer response in the range [0.1 ,2.5] Hz is more or less linear, (this means that the their output is proportional to the acceleration of the IP), then it is appropriate to choose f0 in this range and far from the mechanical resonances of the system. Since the last resonance of the chain is at about 1 Hz, I choose to inject the line at f0=2Hz.
Below is reported the accelerometers sensing matrix:
|
H1 |
H2 |
H3 |
|
|
0.5157 |
-0.2001 |
-0.3197 |
ACC_L |
|
0.0871 |
-0.4990 |
0.4042 |
ACC_T |
|
0.5640 |
0.5685 |
0.5864 |
ACC_Y |
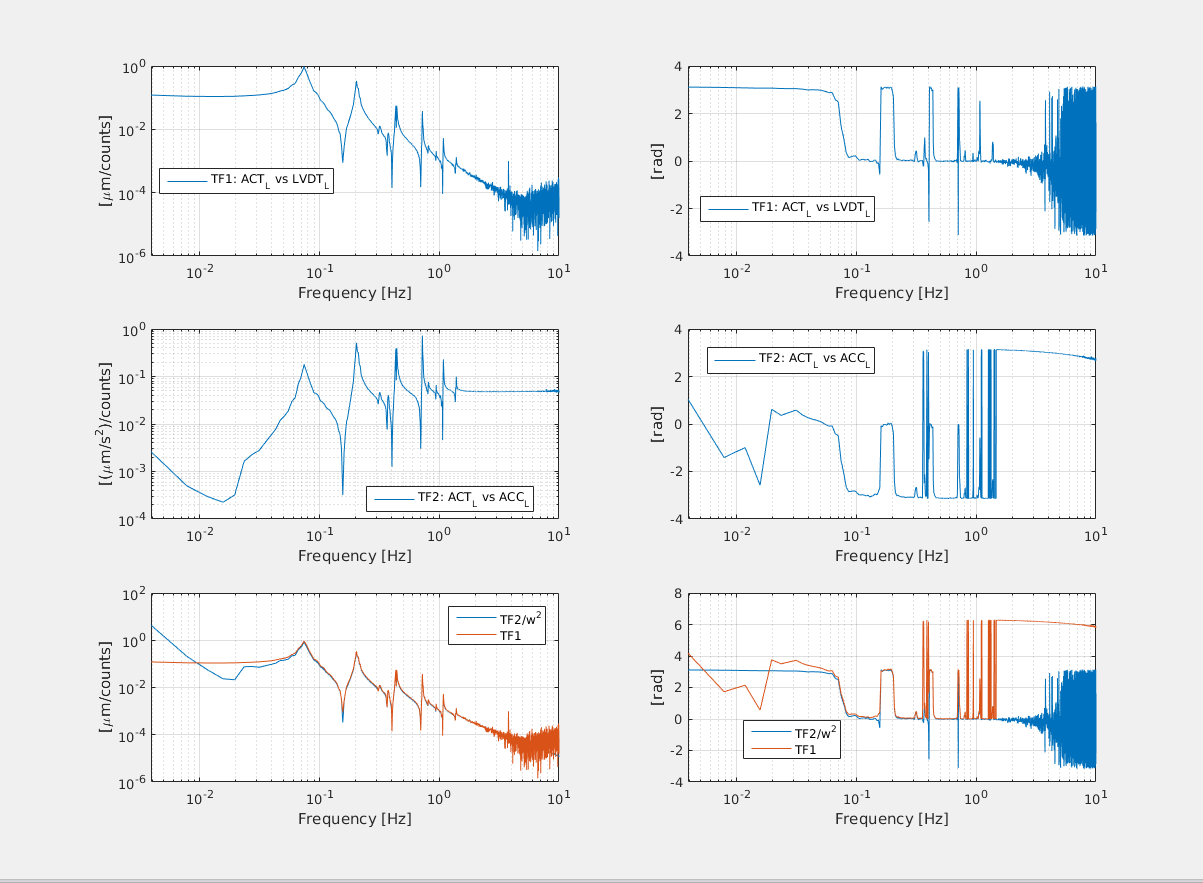
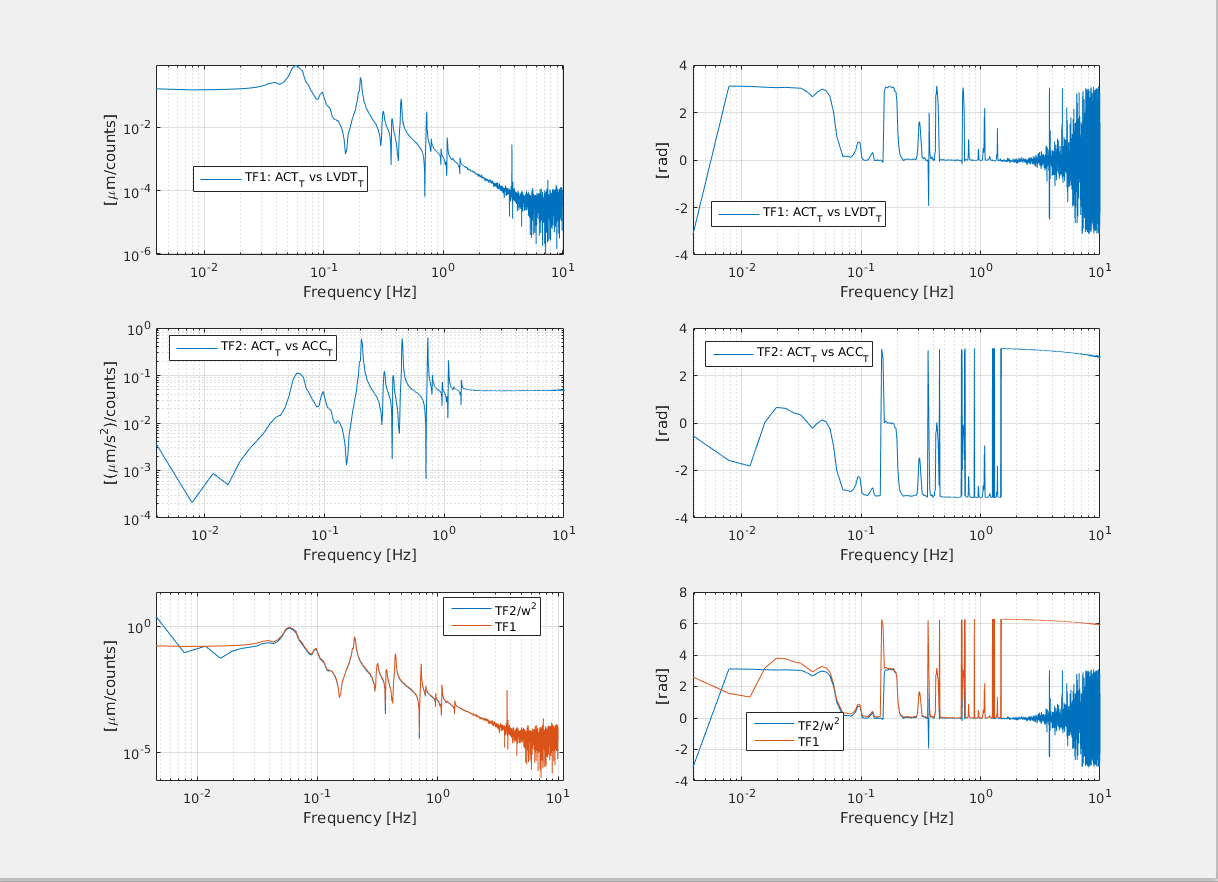
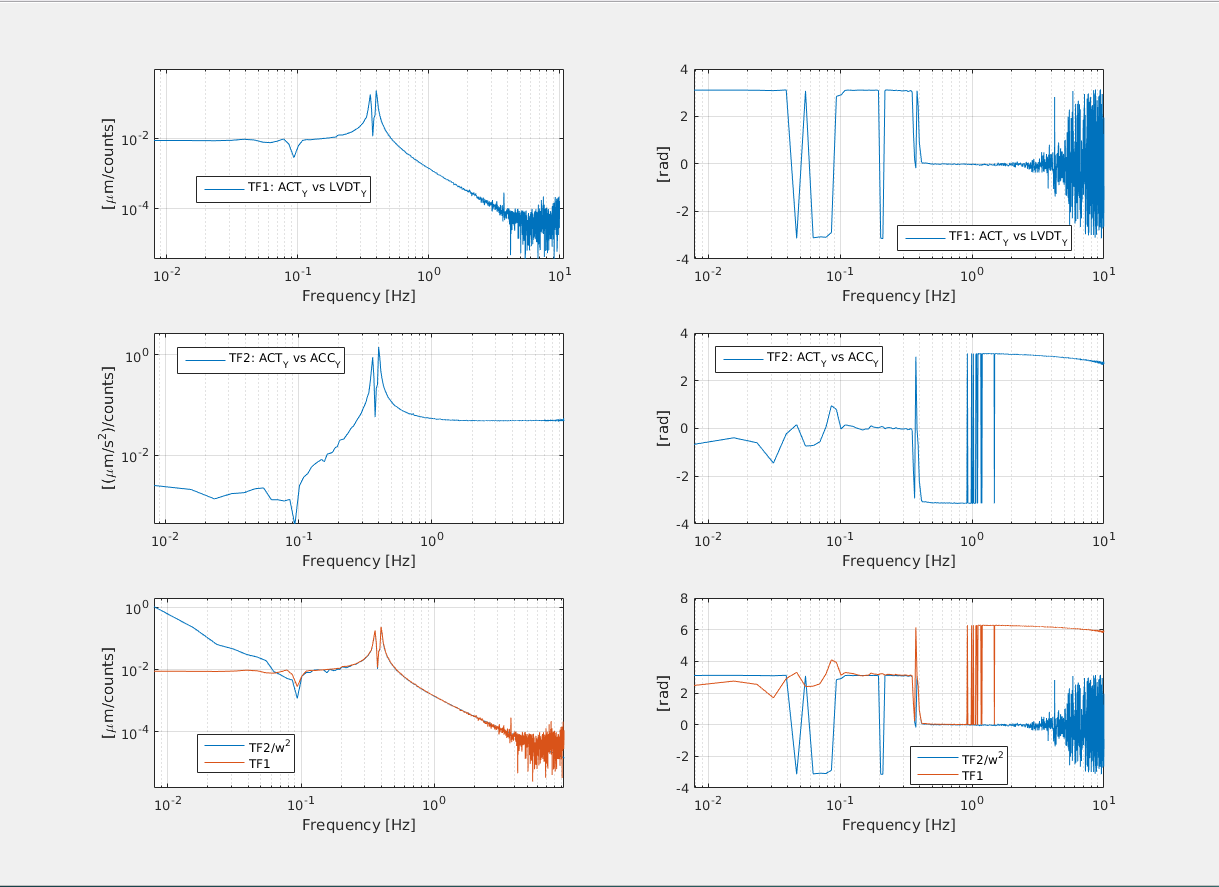
To check the goodness of the calibration procedure and of this matrix I measured the transfer functions by injecting white noise from diagonalized virtual actuators and looking at diagonalized virtual LVDTs and Accelerometers: If the calibration factor and matrix are correct I expect that the TF_lvdt=TF_acc/(w^2)
In the plot [Fig3,Fig4,Fig5] are shown these measurement and we can see that for all d.o.f is verified the assumption:F_lvdt=TF_acc/(w^2).
YesterdayYesterday I performed the calibration of the accelerometers on the ITMX IP, and after that I measured and implemented the related sensing matrix.
Here some details of this work are reported.
Accelerometers calibration
In order to compute the accelerometer horizontal sensing matrix is important that the accelerometers are inter-calibrated each other.
One way to do this calibration is to move the IP along the Yaw degree of freedom by injecting white noise and measure the transfer function: TF_yaw_acc_i= (Yaw*r)./(acc_i)/(2*pi*f)^2 )
Since the Yaw an isotropic motion and the accelerometers are arranged in a plane geometry, on the vertices of an equilateral triangle (120 degrees between each to other and far from the center of IP r=0.5592 m), they must read the same signal, that is: the functions TF_yaw_acc_i (i=1,2,3) must be equals. If this happens the sensors are calibrated, otherwise we have to calibrate them.
For the ITMX I did this operation:
- In Fig1 is shown the TF_yaw_acc_i before the calibration: we see that these responses are different each other for a factor 2 at 0.5 Hz.
I uploted these new calibration factor in the MEDM screen and measured agin the TF_yaw_acc_i:
- [ ] In Fig2 is shown the TF_yaw_acc_i after the calibration: we see that these responses are equal.
Accelerometer sensing matrix: To built the diagonalized virtual accelerometers I chosen to measure the sensing matrix referring at the readout of the diagonalized virtual sensors (L,T,Yaw). This measurement is done by injecting a line at with frequency f0 from each Virtual diagonalized actuator [CoilL, CoilT, CoilY] and by measuring module and phase of the transfer function between the j-th inertial sensor (in this case accelerometer) and the diagonalized LVDTs i=[L ,T ,Yaw]: TFij=(Acc_i/L_j)/(2*pi*f0)^2
* In this way it is possible to measure the amplitude of the response (module) and the sign(TF phase) that each real inertial sensor has when we move only along the selected degree of freedom . These numbers are stored for column in a matrix S whose the inverse is the sensing matrix. A crucial point for the measurement of these matrices is the choice of the frequency f0. We reminde that we have to monitor very small displacements in low frequency region (below 3 Hz), where the inertial sensor must have a good response. Looking at the frequency response (see Fig2) we see that the accelerometer response in the range [0.1 ,2.5] Hz is more or less linear, (this means that the their output is proportional to the acceleration of the IP), then it is appropriate to choose f0 in this range and far from the mechanical resonances of the system. Since the last resonance of the chain is at about 1 Hz, I choose to inject the line at F0=2Hz.
Below is reported the accelerometers sensing matrix:
[0.5157 -0.2001 -0.3197
0.0871 -0.4990 0.4042
0.5640 0.5685 0.5864]
* To check the goodness the calibration procedure and of this matrix I measured the transfer functions by injecting white noise from diagonalized virtual actuators and looking at diagonalized virtual LVDTs and Accelerometer: If the matrix is correct I expect that the TF_lvdt=TF_acc/(w^2)
* In the plot [Fig3,Fig4,Fig5] are shown these measurement and we can see that for all d.o.f is verified the assumption:F_lvdt=TF_acc/(w^2) I performed the calibration of the accelerometers on the ITMX IP, and after that I measured and implemented the related sensing matrix.
Here some details of this work are reported.
Accelerometers calibration
In order to compute the accelerometer horizontal sensing matrix is important that the accelerometers are inter-calibrated each other.
One way to do this calibration is to move the IP along the Yaw degree of freedom by injecting white noise and measure the transfer function: TF_yaw_acc_i= (Yaw*r)./(acc_i)/(2*pi*f)^2 )
Since the Yaw an isotropic motion and the accelerometers are arranged in a plane geometry, on the vertices of an equilateral triangle (120 degrees between each to other and far from the center of IP r=0.5592 m), they must read the same signal, that is: the functions TF_yaw_acc_i (i=1,2,3) must be equals. If this happens the sensors are calibrated, otherwise we have to calibrate them.
For the ITMX I did this operation:
- In Fig1 is shown the TF_yaw_acc_i before the calibration: we see that these responses are different each other for a factor 2 at 0.5 Hz.
I uploted these new calibration factor in the MEDM screen and measured agin the TF_yaw_acc_i:
- [ ] In Fig2 is shown the TF_yaw_acc_i after the calibration: we see that these responses are equal.
Accelerometer sensing matrix: To built the diagonalized virtual accelerometers I chosen to measure the sensing matrix referring at the readout of the diagonalized virtual sensors (L,T,Yaw). This measurement is done by injecting a line at with frequency f0 from each Virtual diagonalized actuator [CoilL, CoilT, CoilY] and by measuring module and phase of the transfer function between the j-th inertial sensor (in this case accelerometer) and the diagonalized LVDTs i=[L ,T ,Yaw]: TFij=(Acc_i/L_j)/(2*pi*f0)^2
* In this way it is possible to measure the amplitude of the response (module) and the sign(TF phase) that each real inertial sensor has when we move only along the selected degree of freedom . These numbers are stored for column in a matrix S whose the inverse is the sensing matrix. A crucial point for the measurement of these matrices is the choice of the frequency f0. We reminde that we have to monitor very small displacements in low frequency region (below 3 Hz), where the inertial sensor must have a good response. Looking at the frequency response (see Fig2) we see that the accelerometer response in the range [0.1 ,2.5] Hz is more or less linear, (this means that the their output is proportional to the acceleration of the IP), then it is appropriate to choose f0 in this range and far from the mechanical resonances of the system. Since the last resonance of the chain is at about 1 Hz, I choose to inject the line at F0=2Hz.
Below is reported the accelerometers sensing matrix:
[0.5157 -0.2001 -0.3197
0.0871 -0.4990 0.4042
0.5640 0.5685 0.5864]
* To check the goodness the calibration procedure and of this matrix I measured the transfer functions by injecting white noise from diagonalized virtual actuators and looking at diagonalized virtual LVDTs and Accelerometer: If the matrix is correct I expect that the TF_lvdt=TF_acc/(w^2)
* In the plot [Fig3,Fig4,Fig5] are shown these measurement and we can see that for all d.o.f is verified the assumption:F_lvdt=TF_acc/(w^2)



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}