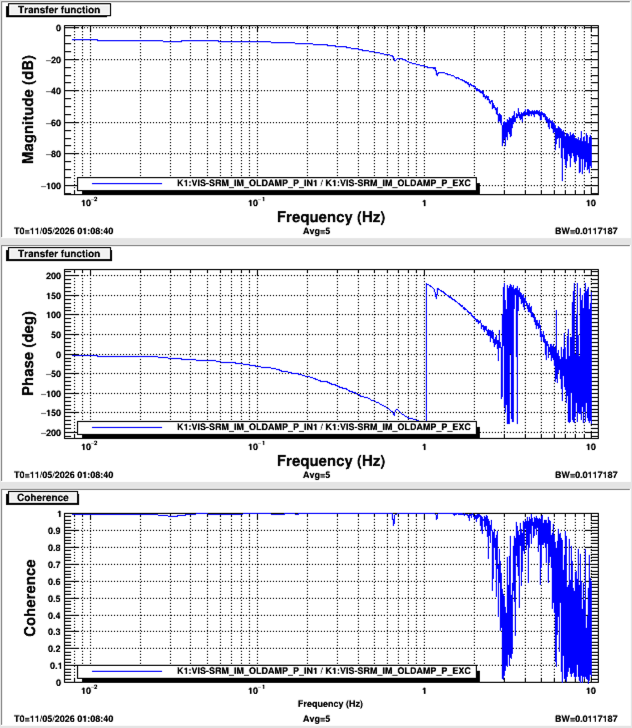
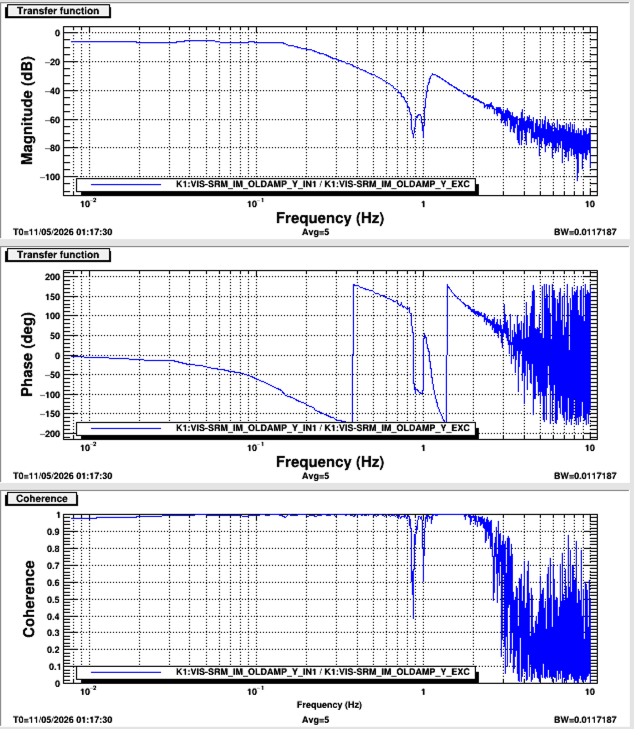
I implemented the hierarchical control for TM with the Oplev. To feed back the DC signals to the IM pitch and yaw, the transfer functions from the IM actuator to the TM Oplev were measured (Ptot 1 and 2). The "DC" (FM9) in the OLDAMP FILTERS in the TM loop was switched off, and the "int" (FM10) in the OLDAMP FILTERS in the IM loop was switched on. The cross-frequency between the TM and IM loops is now below 0.1Hz (I couldn't edit the filter modules in Foton due to the file errors).


This foton error occurred because a filter bank block with one or more filter modules defined was removed from the model.
It was fixed by removing filter module definition of the removed filter bank block manually.
-----
In such case, "File errors" is displayed on a red background, and the error details pop up in a separate window when foton is opened as shown in Fig.1. In many cases, this type of error occurs when a filter bank is removed from the model while its filter design remains. This is because, when the model is rebuilt after deleting a filter bank block, the module name definitions at the top of the foton file are generated based on the new filter bank list, but the filter coefficient definitions are not cleaned up. Normally, this specification should not become a problem, because filter bank blocks are not repeatedly added or removed without sufficient consideration and reviews. But it often becomes an issue within KAGRA’s management and operation framework.
Anyway, VIS-SRM_TM_SENSCORR_L was removed from the k1vissrmp model probably in klog#36457 though some filter module definition was remained on that filter bank. An only safe method is to clean up the filter modules on the filter bank that will be deleted before installing the updated model. But in this case, nobody probably noticed fact that some filter banks would be removed because it's not mentioned in the model update plan (klog#36374). The other method is to edit the foton file manually after installing the updated model. Though foton files are in plain text format, their formatting is so strict and they can very easily become unreadable from foton or models by a manual edit. So it's never recommended. But this is only way if we couldn't notice before installing updated models and I did it in this time. Removed filter modules are shown in Fig.2.
After manual fixing, all errors were cleared on foton. But a warning still remains related to the too low (but non-zero) zero/pole as shown in Fig.3. Though it's not a problem on reading filters by foton and models, numerical errors often occurs on that filter bank. Please remove it if it's unnecessary, or please change corner frequency as a higher value with a careful design of the control if it's used.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
I modified the servo filter "int" (FM10) in the OLDAMP FILTERS in the IM loop. The cross-frequency between the TM and IM loops was set to 0.1Hz for both pitch and yaw directions. I offloaded the IM pitch with the picomotor.
I modified the ALIGNED state's script of the SRM guardian to engage this hierarchical control. I confirmed that this control was engaged by the guardian and that the guardian could transit between ALIGNED and DAMPED states.
Note:
I have not implemented "LOCK_ACQUISITION" state for SRM. So please do not request SRM guardian to go to "LOCK_ACQUISITION" state. Also, MISALIGNED state has not been implemented.
I modified the filters in SRM_IM_OLDAMP_{Y, P} as follows:
- Moved FM9 (null) to FM8
- Moved FM10 (int) to FM9
- Set the ramp time in FM9 (3 sec)
I also changed the guardian script as follows:
- Before: turning off FM9 (null) in ENGAGE_PAY_DC
- After: turning on FM9 (int) in ENGAGE_PAY_DC
After these modifications, the guardian successfully reached to MISALIGNED state. Once I confirmed that, I changed the value how we misalign SRM in MISALIGNING. Default was 10 for PIT and 10 for YAW; now it is 1000 for PIT and 0 for YAW.
I also modifed the guardian setting in OPEN_ISC so that we can inject signals from the main interferometer (TM_LOCK_L, TM_DITHER_P, and TM_DITHER_Y are open). I didn't make any change in ENGAGE_STRONGDAMP, because it seemed that we need to implement lots of filters in IPs. Anyway, now the guardian can reach the LOCK_ACQUISION state.