## Abstract
In order to unifiy the design philosophy of Type B local controll filter, I began to modify the control filter in the SR2 tower part (IP_IDAMP_Y, {F0,F1,BF}_DAMP), especially their roll off filters so that the same filters as SR3 are used in SR2.
Feedback spectra above 10 Hz seem to be reduced thanks to this modification. However, there seems to be gain peaking at 3-4 Hz in GAS signals. so we need to adjust them.
## What we did
In order to unifiy the design philosophy of Type B local controll filter, I began to modify the control filter in the SR2 tower part (IP_IDAMP_Y, {F0,F1,BF}_DAMP) so that the same filters as SR3 are used in SR2.
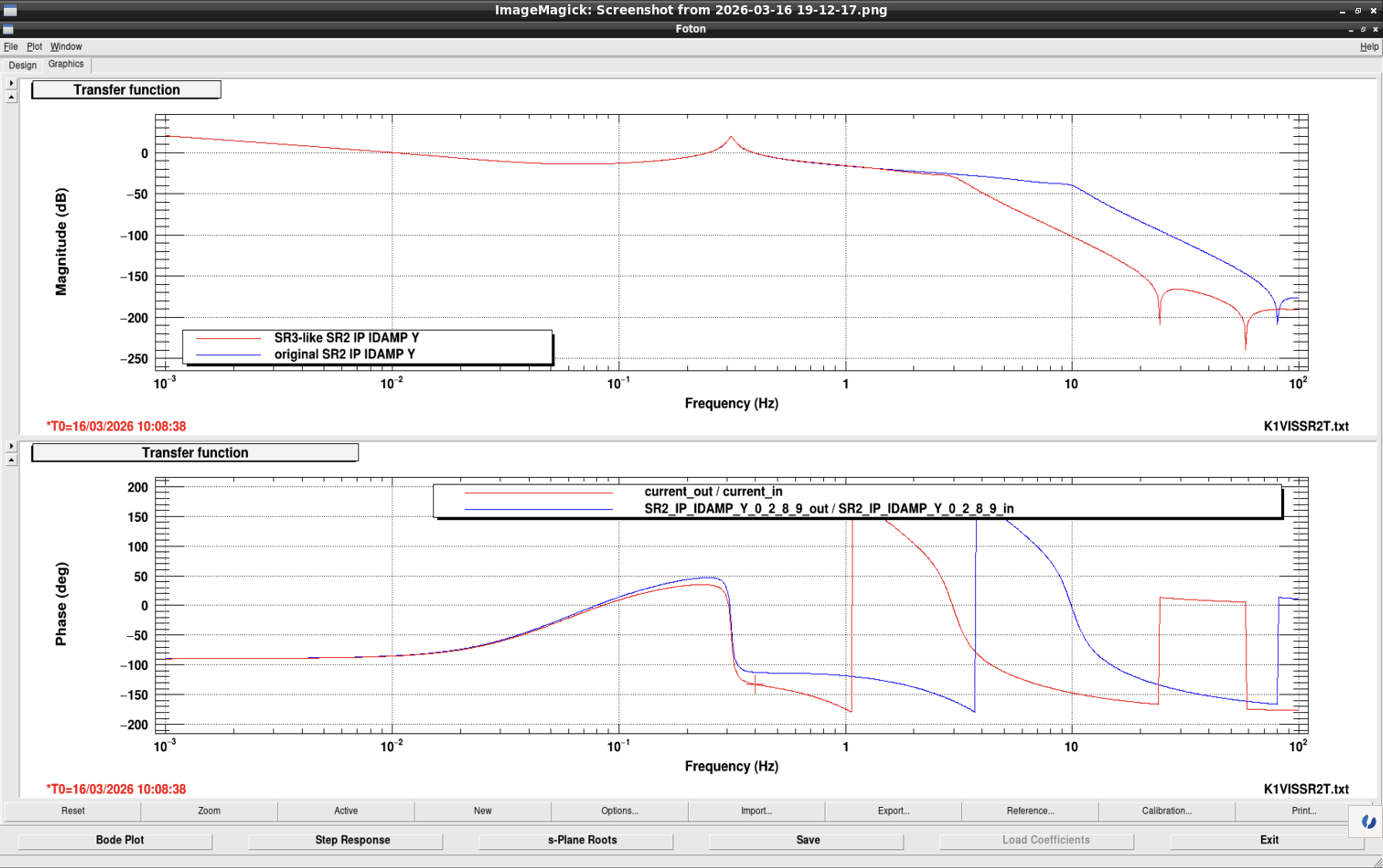
Basically, the difference between SR2 and SR3 controll fitlers was the roll-off filters. SR3 usually used the 4th order elliptical lowpass filter. On the other hand, SR2 used 2nd or 3rd order pole. Therefore, the gain of the SR2 filter above 100 Hz is typically more than 20dB larger than the one of SR3. This indicates the SR2 filter transmits the 20dB larger sensor noise above 100 Hz to the suspension. So, I tried to impliment the same roll off fiter to SR2 control.
Fig. 1 shows the example of the modification for SR2_IP_IDAMP_Y. Fig.2 shows the medm screen of SR2_IP_IDAMP at that moment. I modified the roll off filter for GASs in the same manner.
After the implementation, I confirmed that SR2 could be reached LOCK_ACQUISITION state. Then, I measured the spectra of error/feedback signals of their controls in the LOCK_ACQUISITION state. Fig.3 and 4 shows the results of IP and GAS, respectively. Red curves in figures are current SR2 error/feedback signal spectra and magenta curves are the spectra before the modification. Blues(and Cyans) are the spectra of SR3 as references. Above 10 Hz, the feedback signals' spectra were reduced successfully. On the other hand, there seems to be gain peaking at 3-4 Hz in GAS signals. So we need to fix them.
## Next
- IM_DAMP_{L,T,V,R,P,Y}




{kind=link}
{kind=link}
{kind=link}
{kind=link}