With Takahumi USHIBA
Purpose and Overview
- Due to tidal motion, an offset gradually accumulates in the feedback signal applied to the IP (Inverted Pendulum).
- The purpose of this work was to offload this offset before the IP feedback signal saturates.
- Because there is LPY coupling, the offloading causes a drift in the PY alignment of ETMX. Therefore, after offloading, the PY alignment was manually adjusted to maximize the green transmission, and the good oplev setpoints were updated accordingly.
Procedure
- Request
RESET_ASC_FEEDBACK and DOWNto LSC_LOCK
This was necessary to correct the alignment and set all suspensions toLOCK_ACQUISITION. - Monitoring TM Oplev and Green Transmission
TM oplev signals and green transmission were monitored during the procedure. - ETMX-IP-ISC2LVDT Filter Bank
Opened the filter bank of ETMX-IP-ISC2LVDT.
The objective was to bring the output signal to zero.
Set the ramp time to 100 seconds.
Set the gain to 0.
Waited for 100 seconds.
Observed that the green transmission decreased (flash level dropped to around 0.4), which was too low for locking.
Pressed Clear History.
Restored the ramp time to 3 seconds.
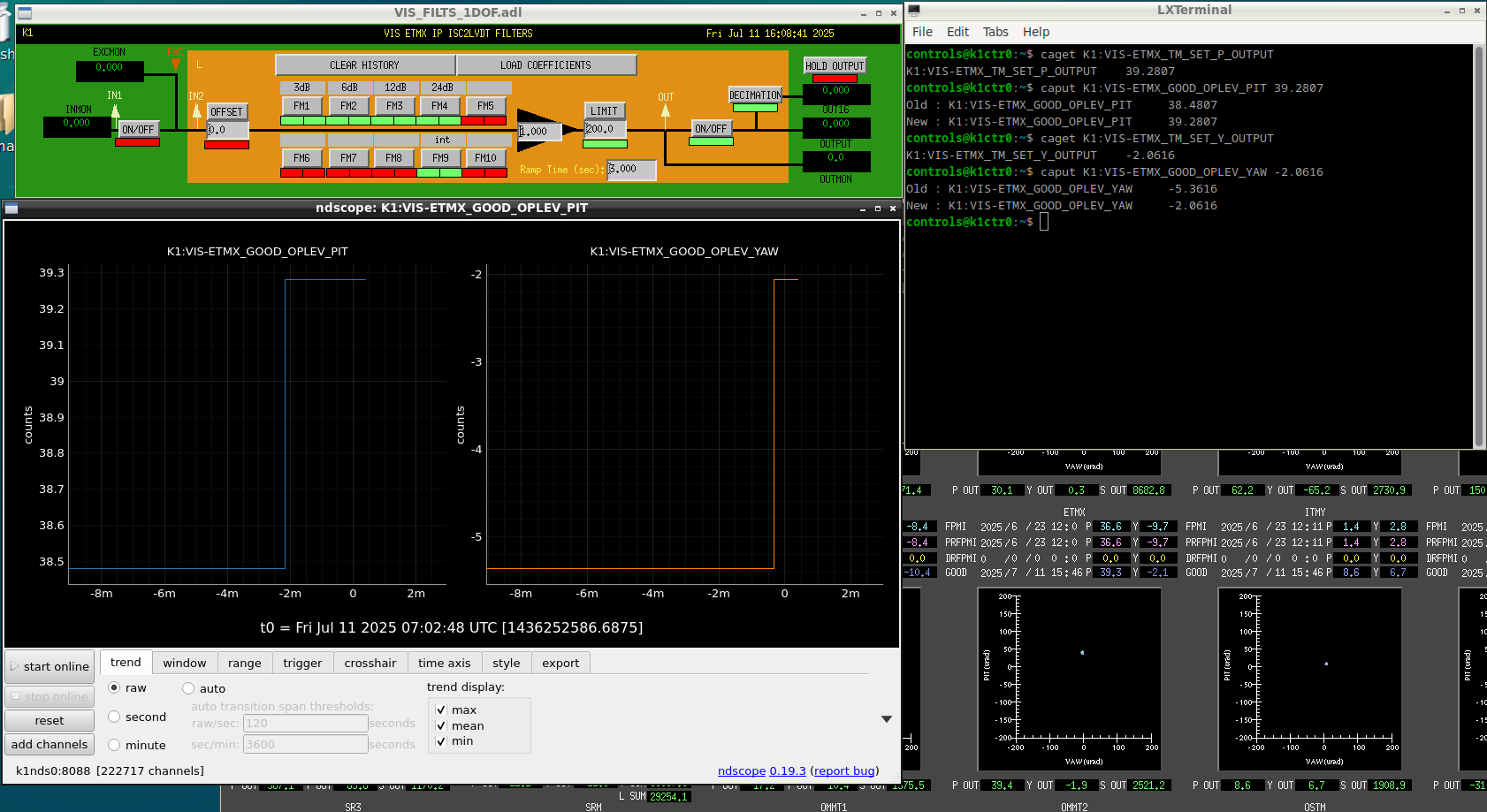
Restored the gain to 1. - Recovery of Green Transmission by Adjusting TM Oplev Setpoints
Manually adjusted TM oplev setpoints referencing the green transmission value.
After adjustment, the green transmission recovered to approximately 0.9. - Updating Good Oplev Setpoints
Updated oplev setpoints to reflect the adjustments made during this work today:
Pitch: 37.2 → 39.1
Yaw: –9.26 → –1.76 - Lock Trial
Performed a lock acquisition trial.
Successfully achieved lock.

{kind=link}