Abstract:
I increased the gain of ITMY BPC PIT and YAW by a factor of 3 and 12, respectively.
To achieve this state at OBSERVATION state, I modified the DOWN and SET_BPC_FREQ_FOR_OBSERVATION of ASC_LOCK guardian.
Detail:
As reported in klog34073, current BPC for ITMY is very slow, so I increased the gains of BPC.
Since PIT and YAW loop takes 30 minutes and 2 hours for reaching steady state, I increased the gain by a factor of 3 and 12 for PIT and YAW loop, respectively.
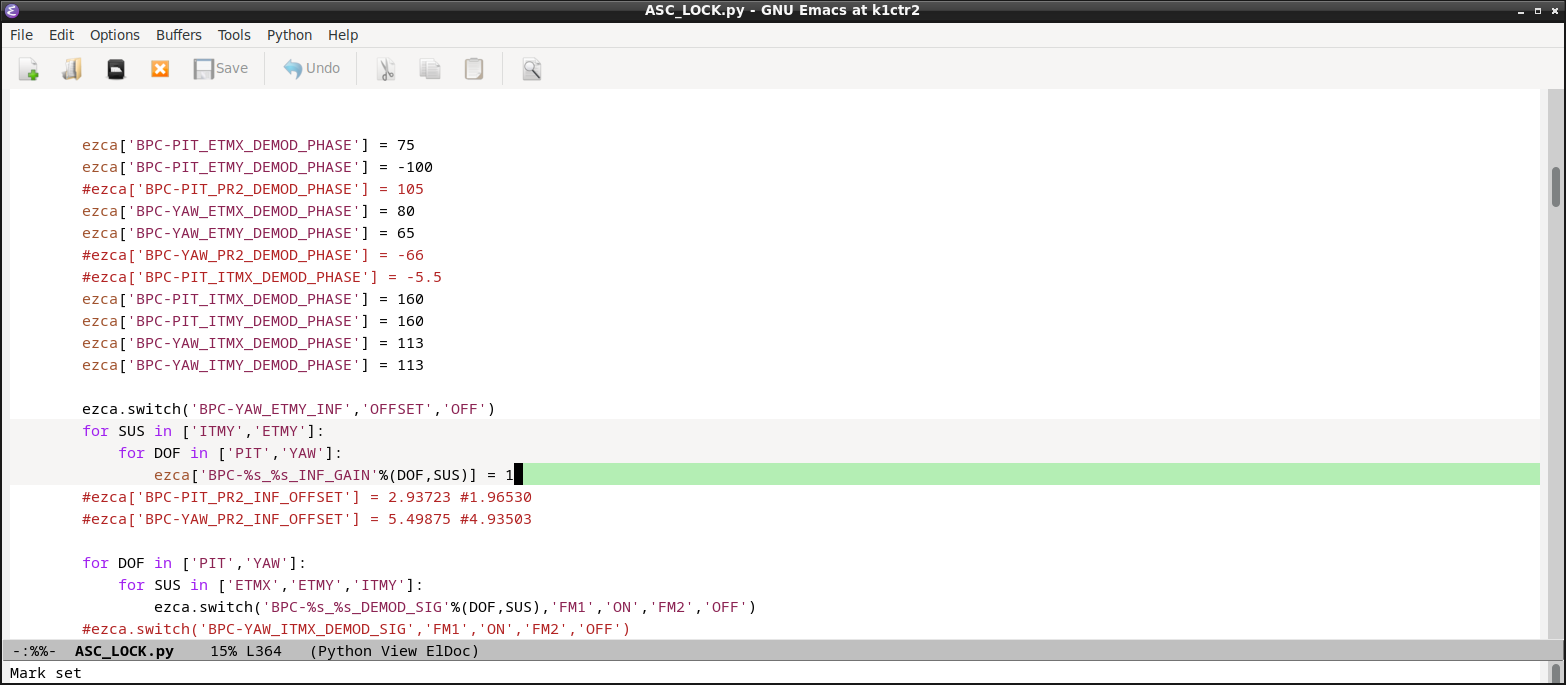
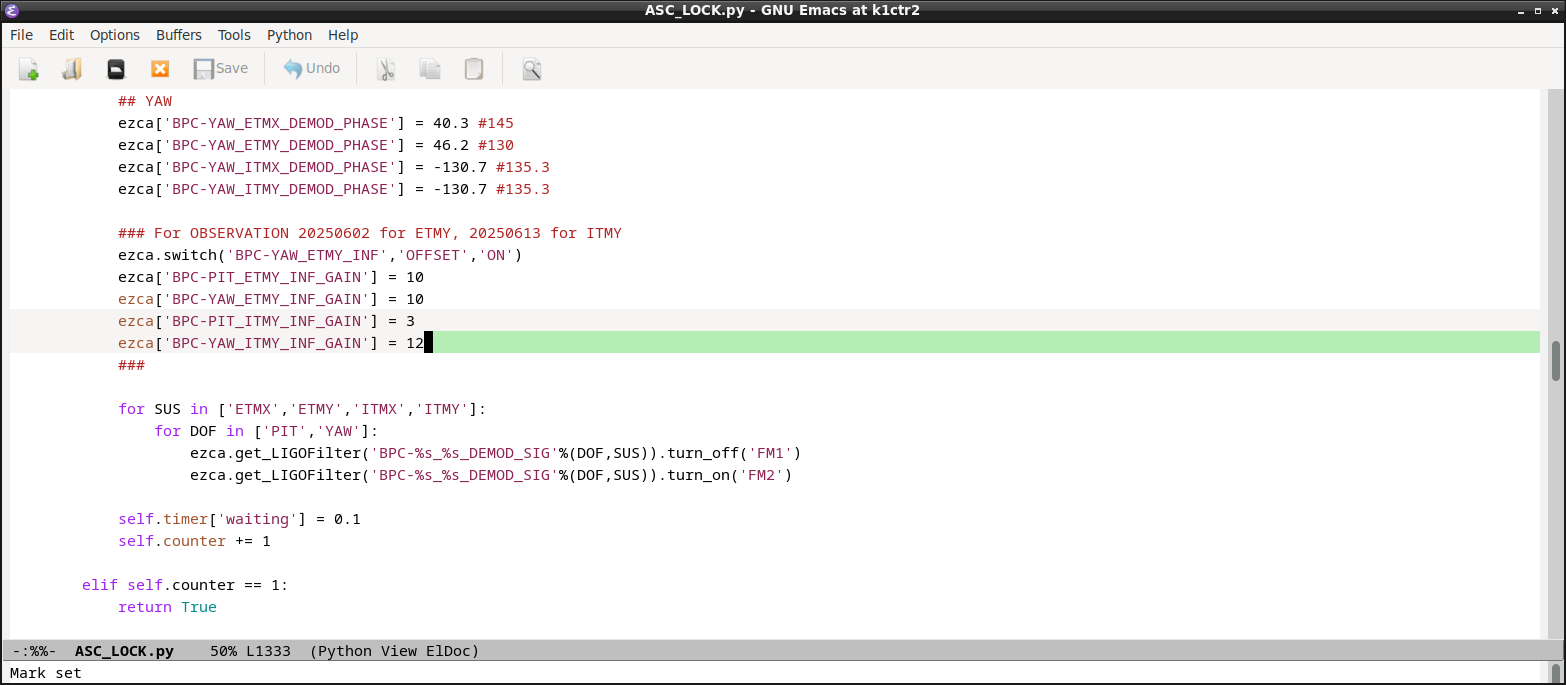
To implement this modification into the guardian, I modified the DOWN state (fig1) to revert K1:BPC-{PIT,YAW}_ITMY_INF_GAIN and SET_BPC_FREQ_FOR_OBSERVATION state to implement new gains (fig2).
After modification, I confirmed the new guardian works well.


{kind=link}
{kind=link}