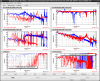
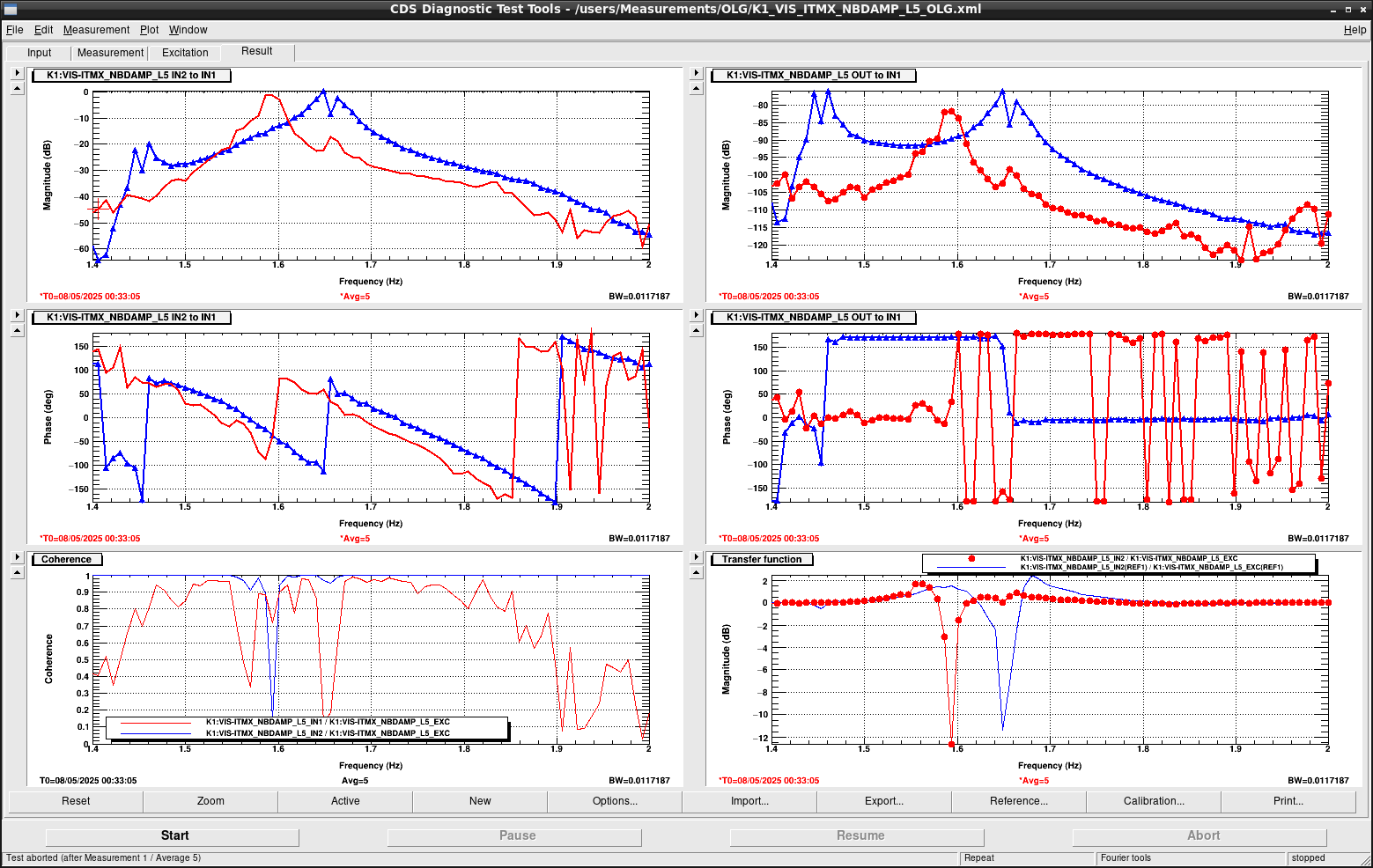
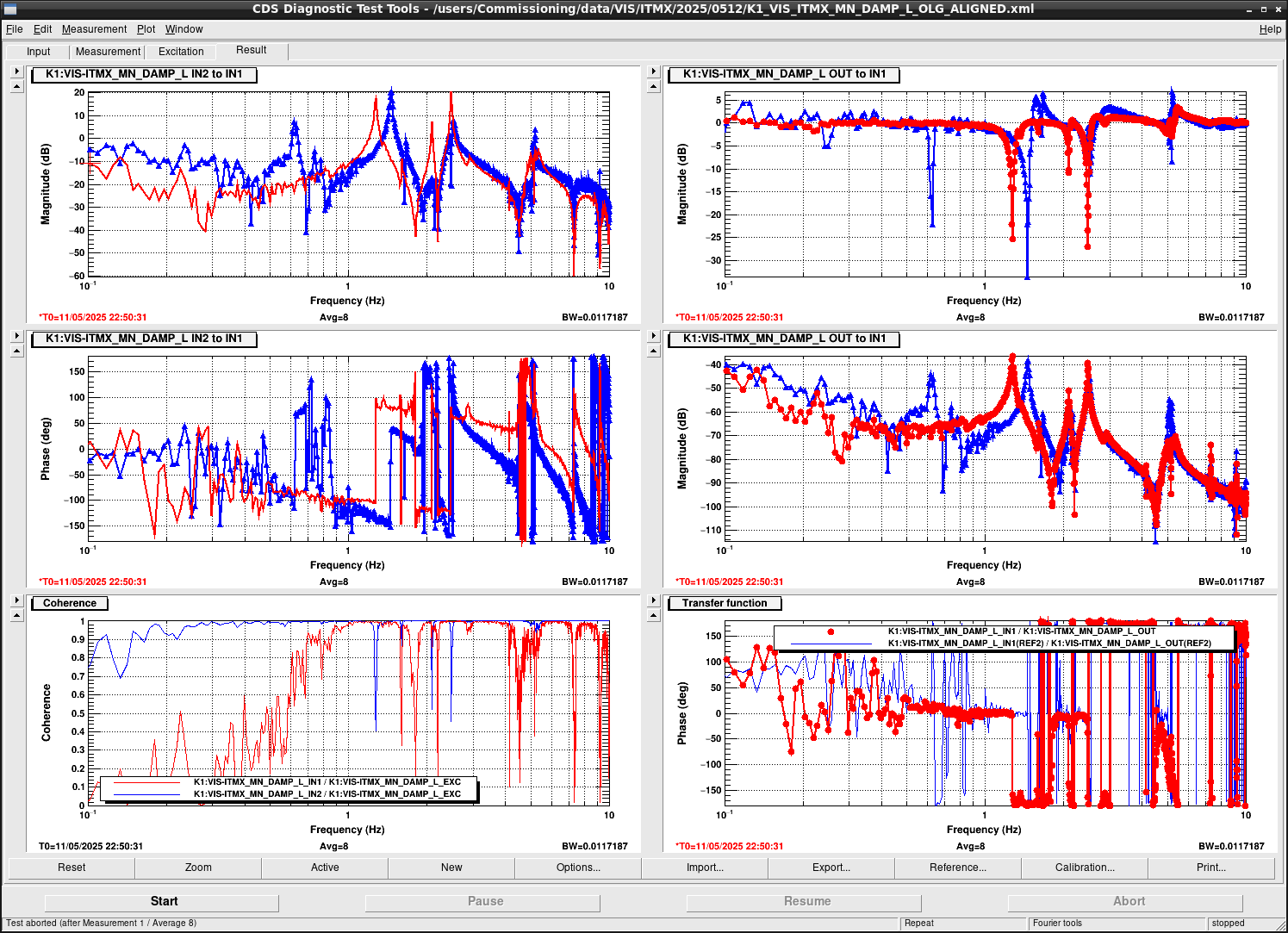
Then when I requested the LOCK_ACQUISITION state, large oscillation around 1.6 Hz became larger as shown in Fig.2. The NBDamp L5 started oscillation (1.64 Hz L).
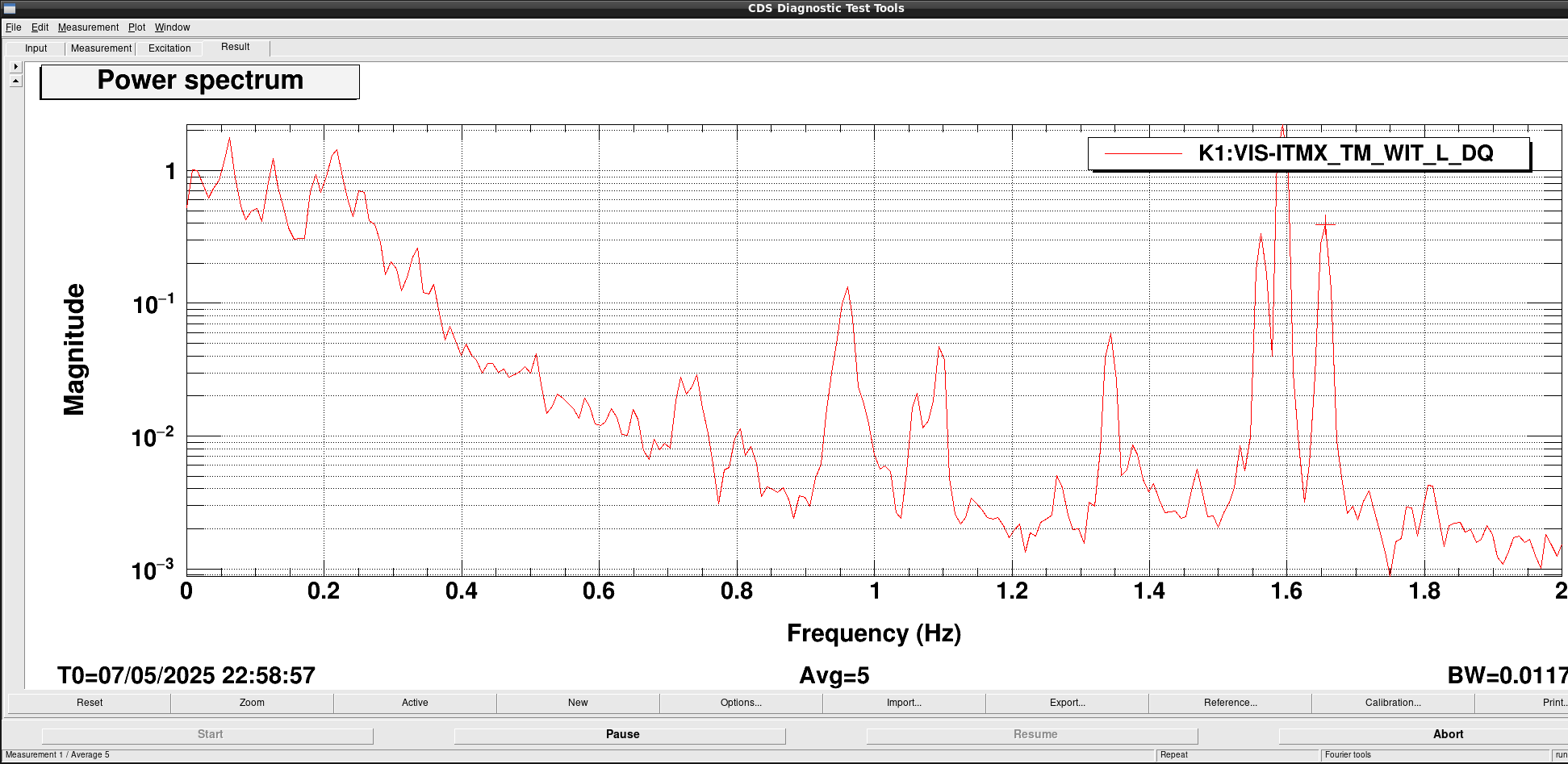
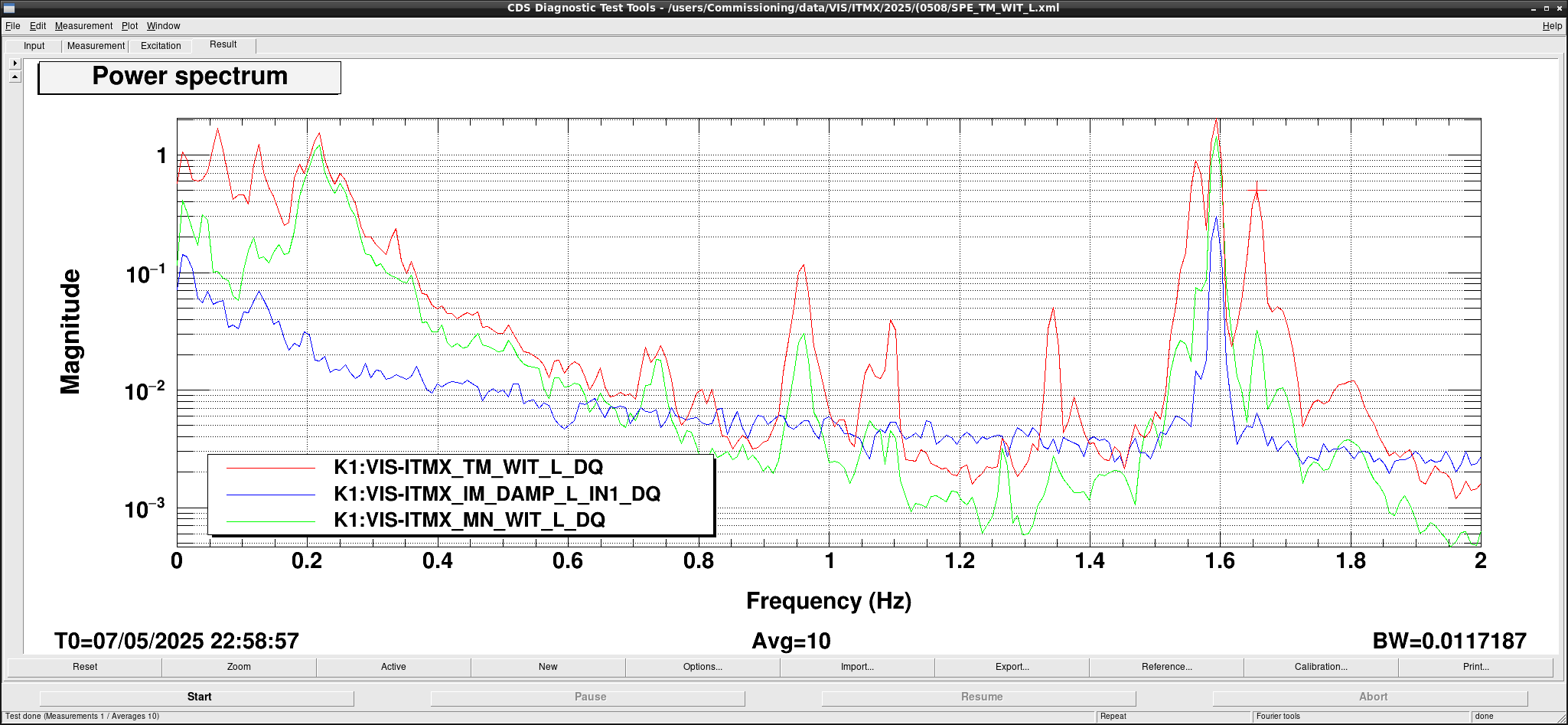
I checked the spectrum of the TM WIT L in PAY_FLOAT state and found there are thee peaks around 1.6 Hz.
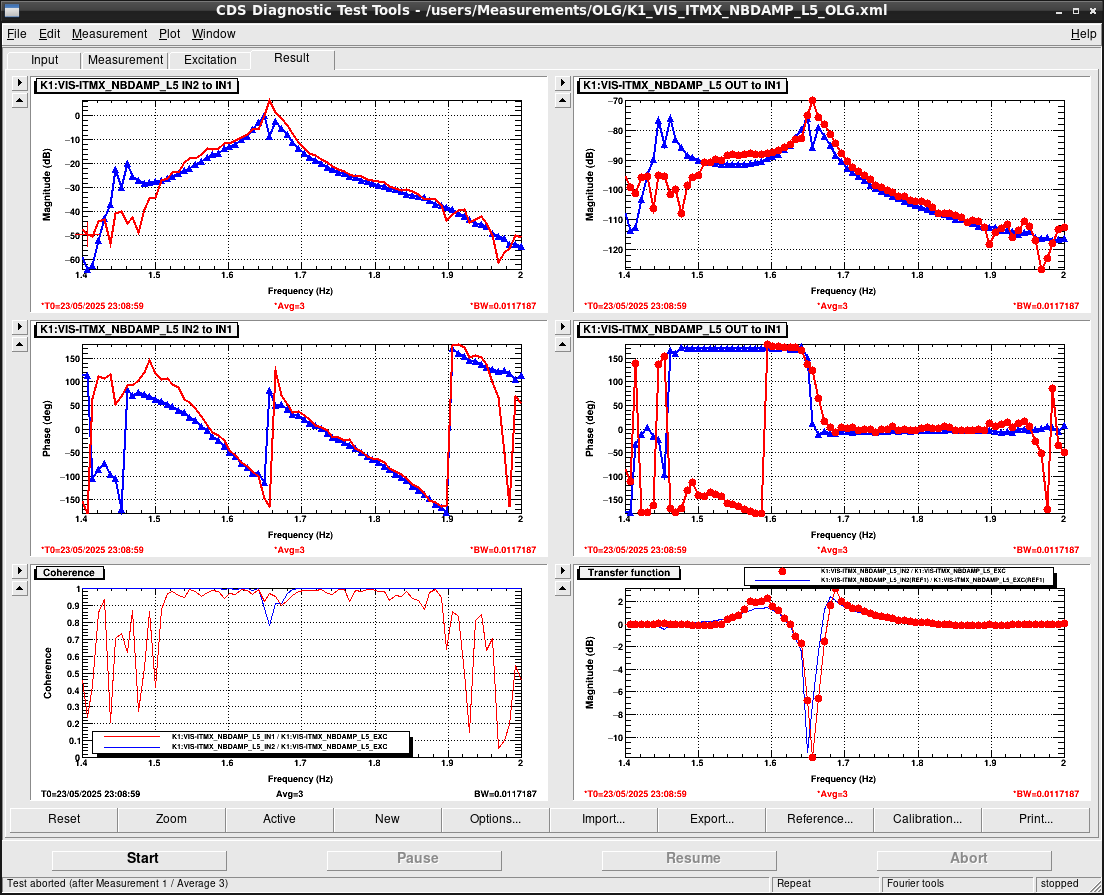
We will start the tuning of the L5 filter of ITMX from now (Can I make the suitable filter for "three peaks" ?)
.
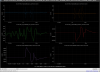
I modified the filter and turned the gain and implemented the L5 NBfilter for ITMX as shown in Fig,2.
I will check the stability.

Should I or some expert check them?
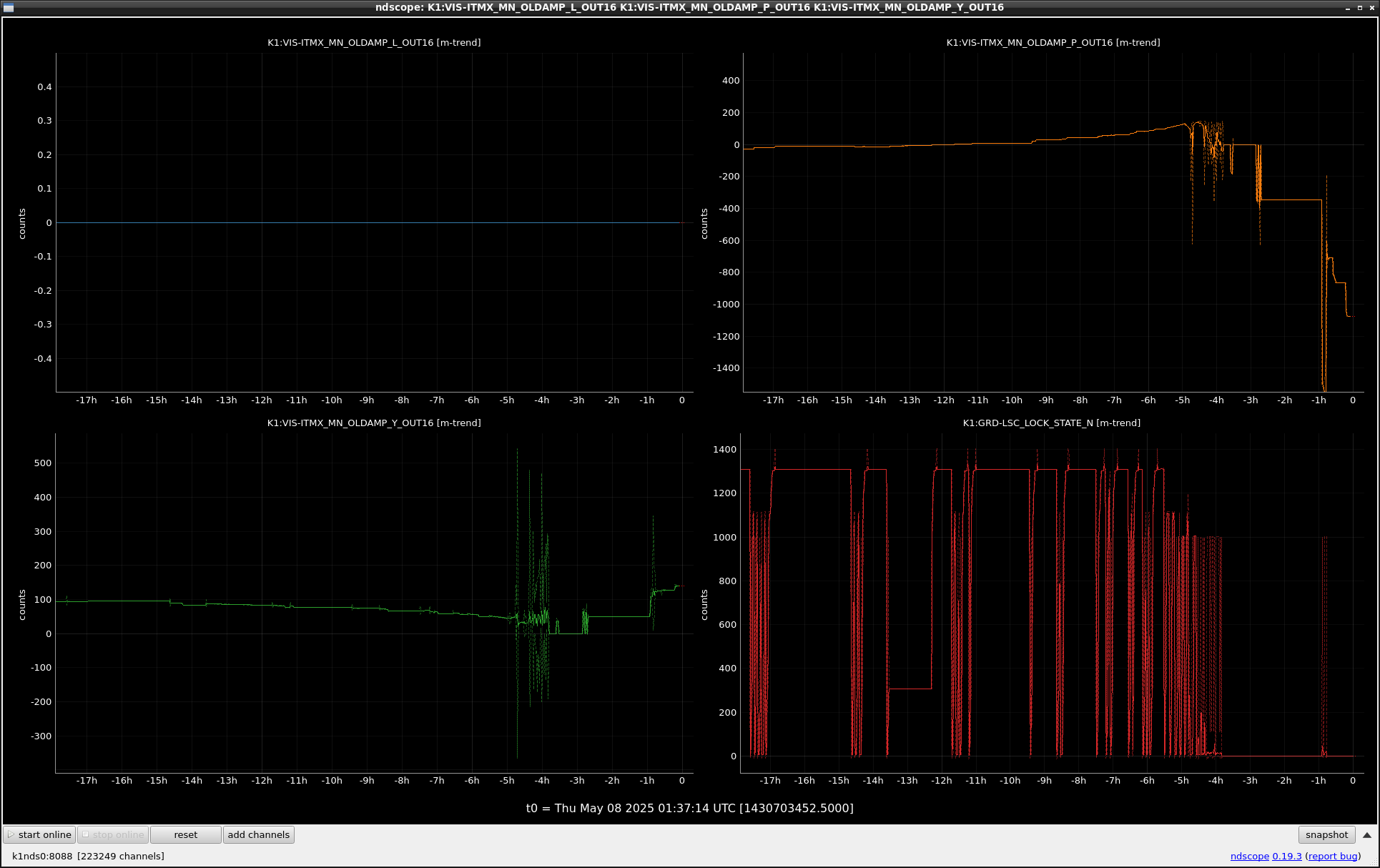
Finally, due to the saturation of the v actuators(v1 and v3) in ITMX MN, we cannot be the aligned state.

Only the F2 GAS output became larger, others were similar behavior.





It seems 23.38Hz enhancement (see also Fig.2).
A situation of oscillation and saturation was change even if guardian was kept in DAMPED as shown in Fig.3.
It seems instability of sensors or actuators instead of servo filters.
Anyway, current DAMPED state is not so stable for keeping suspension in that state.



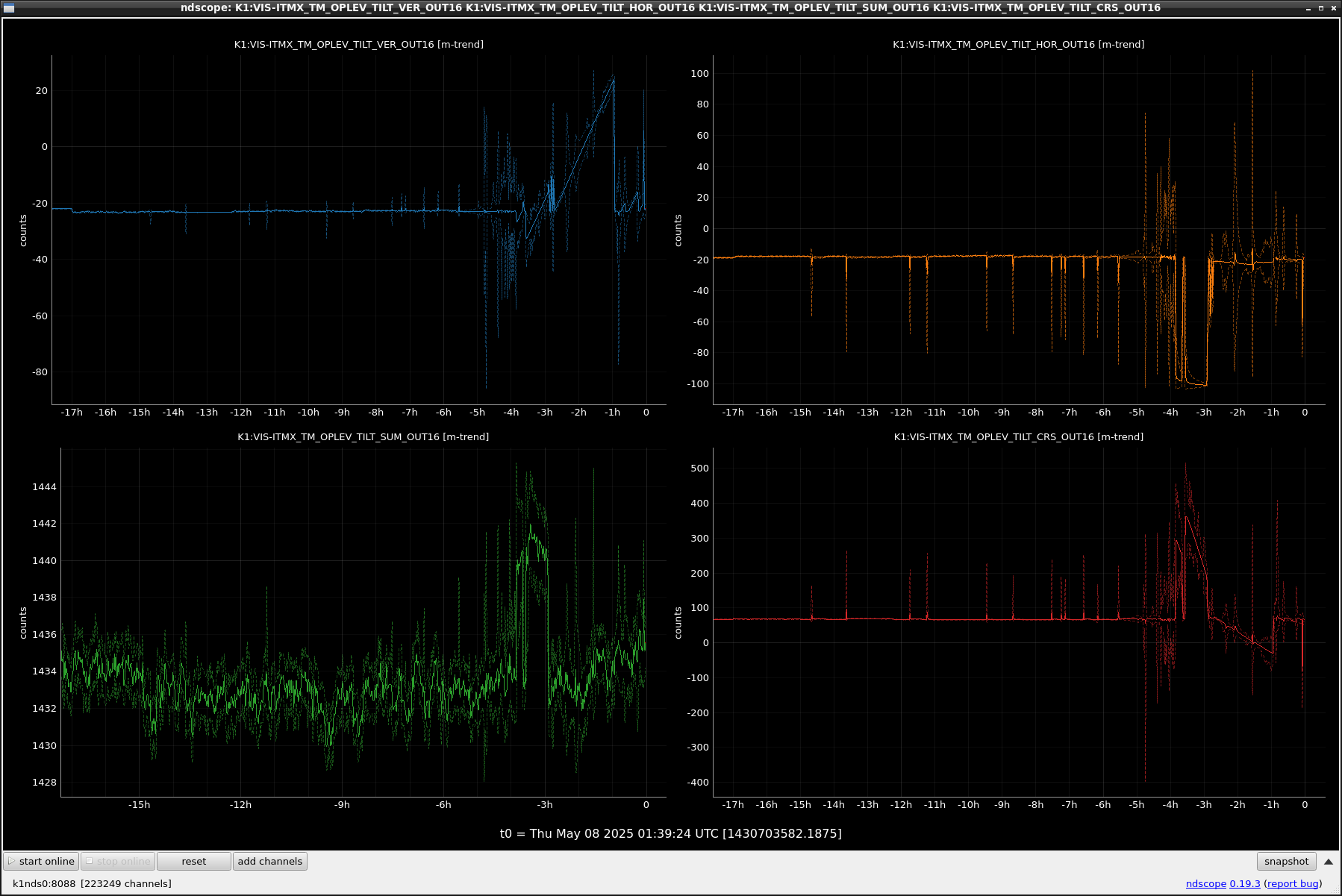
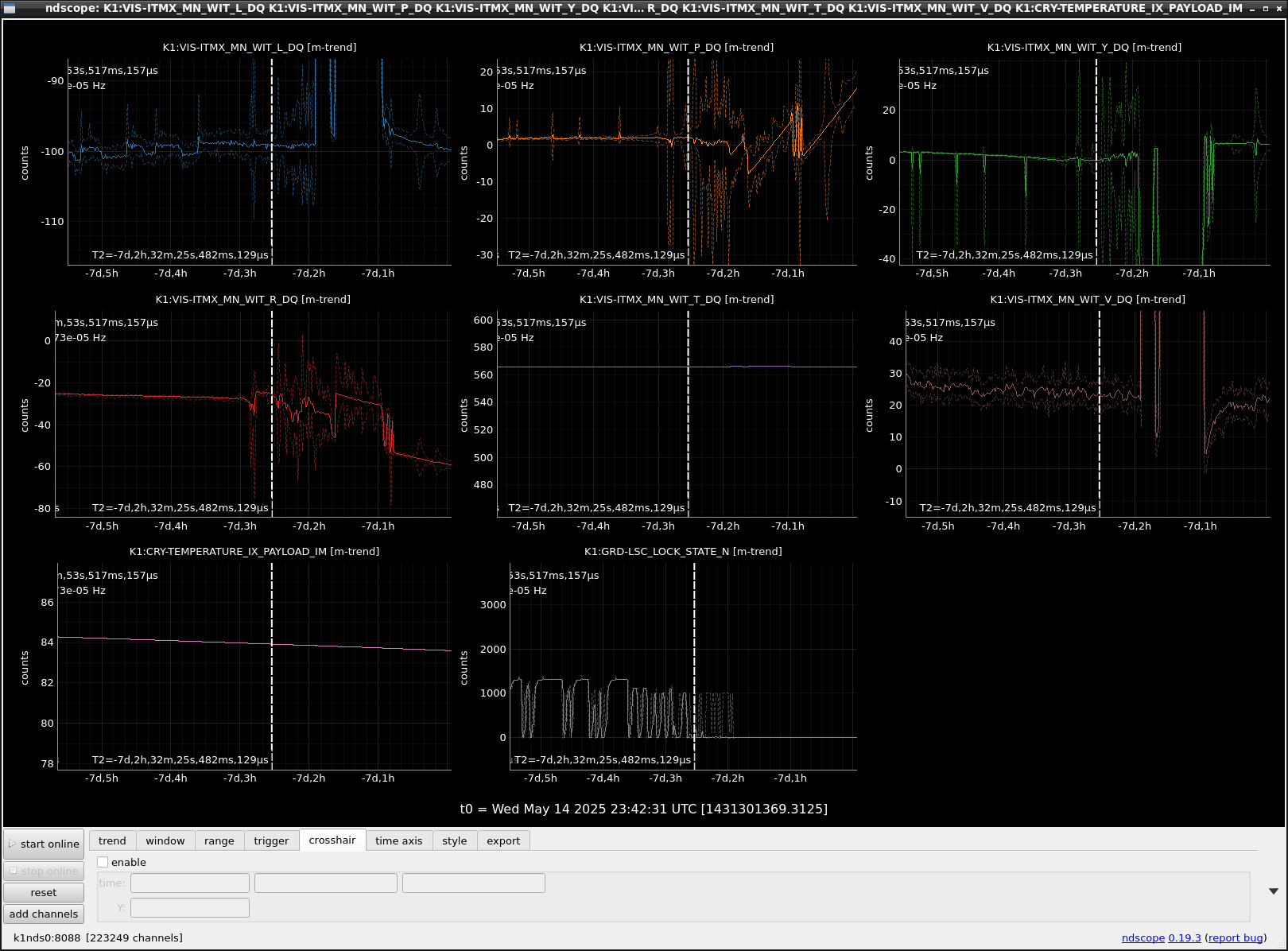
As you can see, TM pitch was drifted gradually, but there are several small jump.
In case of TM yaw, it suddenly jumped at several timing.
I performed the moving mass control by adjusting the TM oplev set point.
After succeeded the pitch recovery by the moving mass, there are large discrepancy also in yaw.
So, I tweaked the BF yaw set point.
I changed the BF yaw set point from 895 to 1950.
After adjustment the alignment by moving mass (pitch) and set point of BF yaw (yaw), I noticed the MN oplev also drifted.
Especially, MN yaw and MN rol drifted large
So I performed the QPD centering by entering the mine.
Next step would be the health check and damp control check.

Both pitch and yaw drift was same direction yesterday.
setting point BF Yaw 1950 -> 2625
Both pitch and yaw drift was same direction yesterday.
setting point BF Yaw 2625 -> 3360
Both pitch and yaw drift was same direction yesterday.
setting point BF Yaw 3360 -> 3940
L,T,R would be not so strange, but both Pitch and Yaw had much strange response.
We moved a lot to align for the test mass?
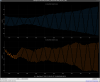
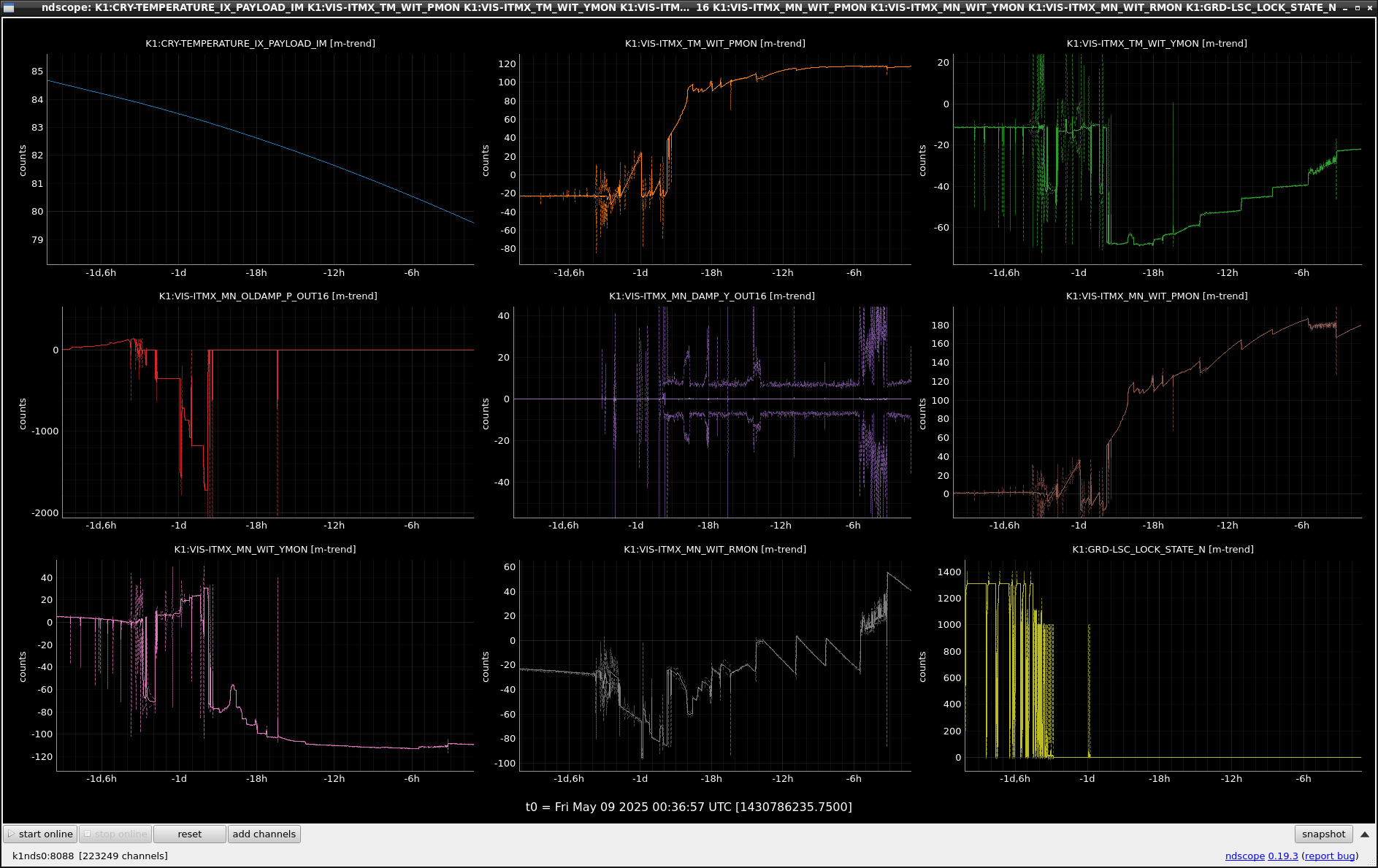
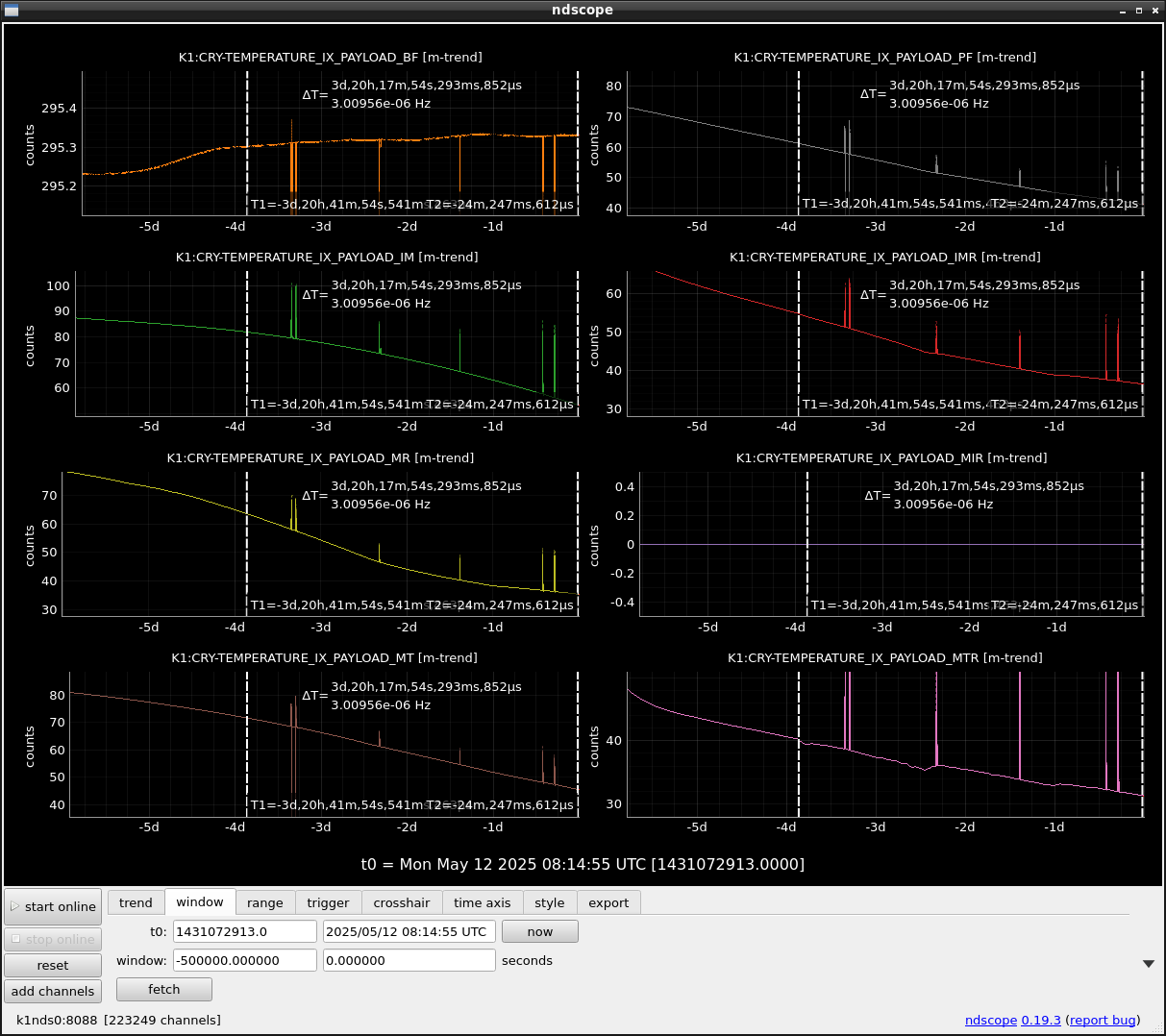
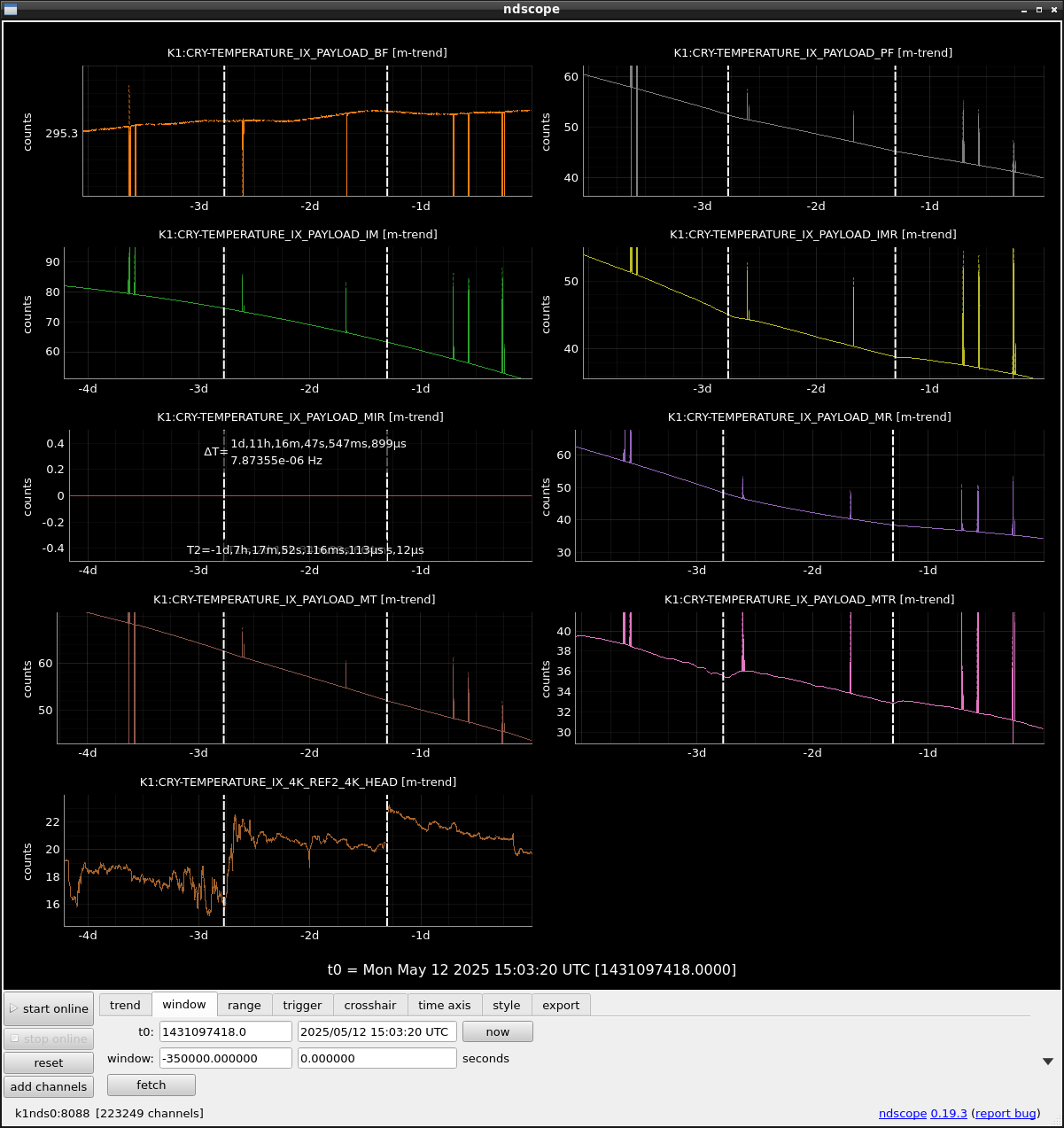
If some contacts happened in the IX cryo-payload, the sudden temperature changes could be expected in these components because it had thermal contact.
Fig 1 shows the temp trends after reporting the strange drift on 8th May.
Around 4 days before (8th may), slight temperature changes happened in MTR. The changes about -2.4 days and -1 day happened in MTR and IMR.
By the way, the operation of the moving mass would generate slight heat and heat up MN??

[Komori, Yokozawa, Ushiba]
Abstract:
ITMX TM chain seems to touch RM chain (we suspected IM-IRM).
Hitting becomes better when MN was tilted in -YAW/-PITCH direction (however, it cannot be released with the current actuator efficiency), so it would be good to confirm if we can release it with original AE with high power coil driver.
Detail:
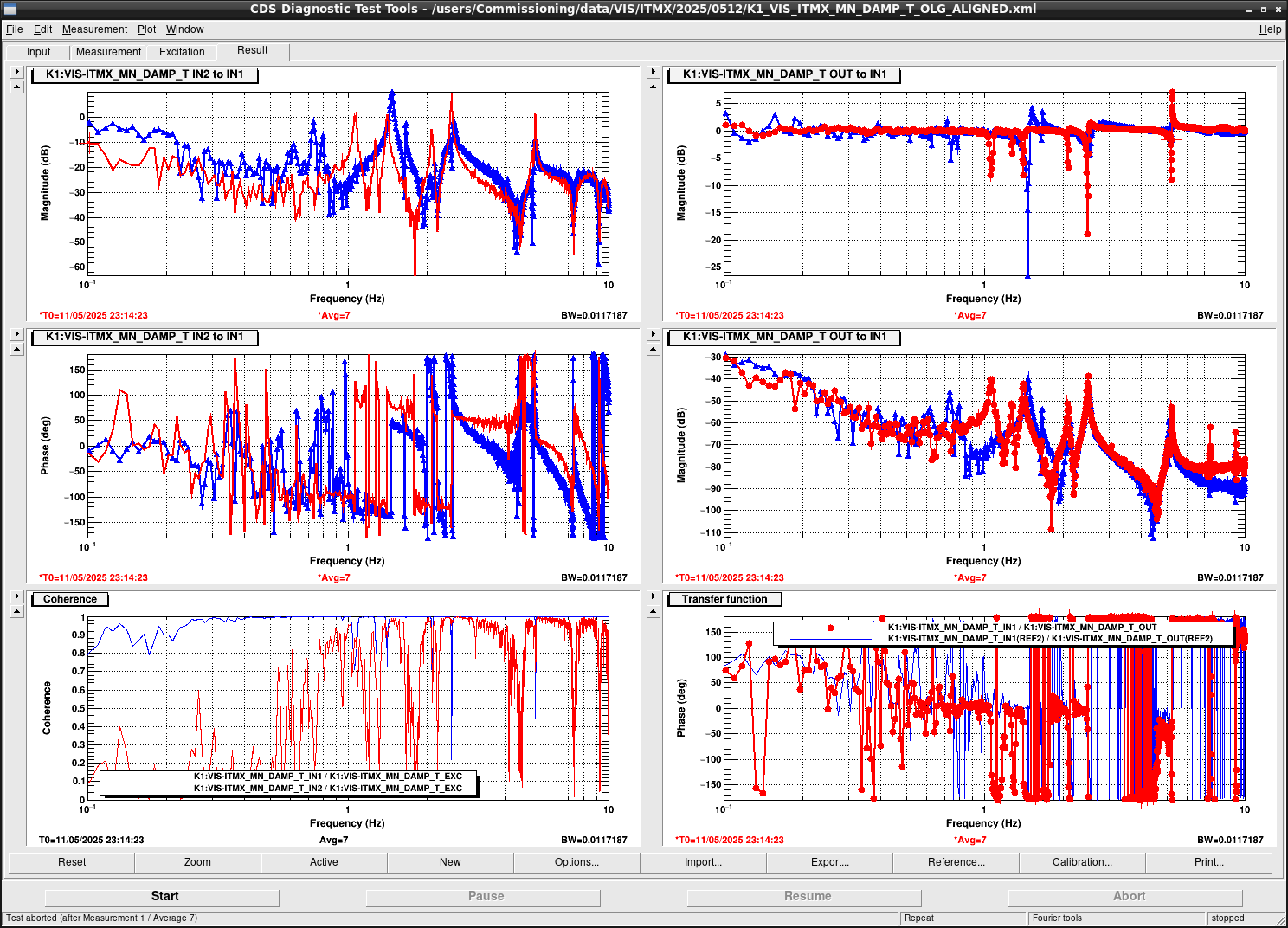
Since health check results were not good and it is very likely that suspension is touching/rubbing somewhere, we started from confirming touching position.
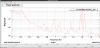
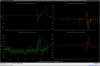
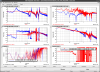
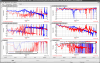
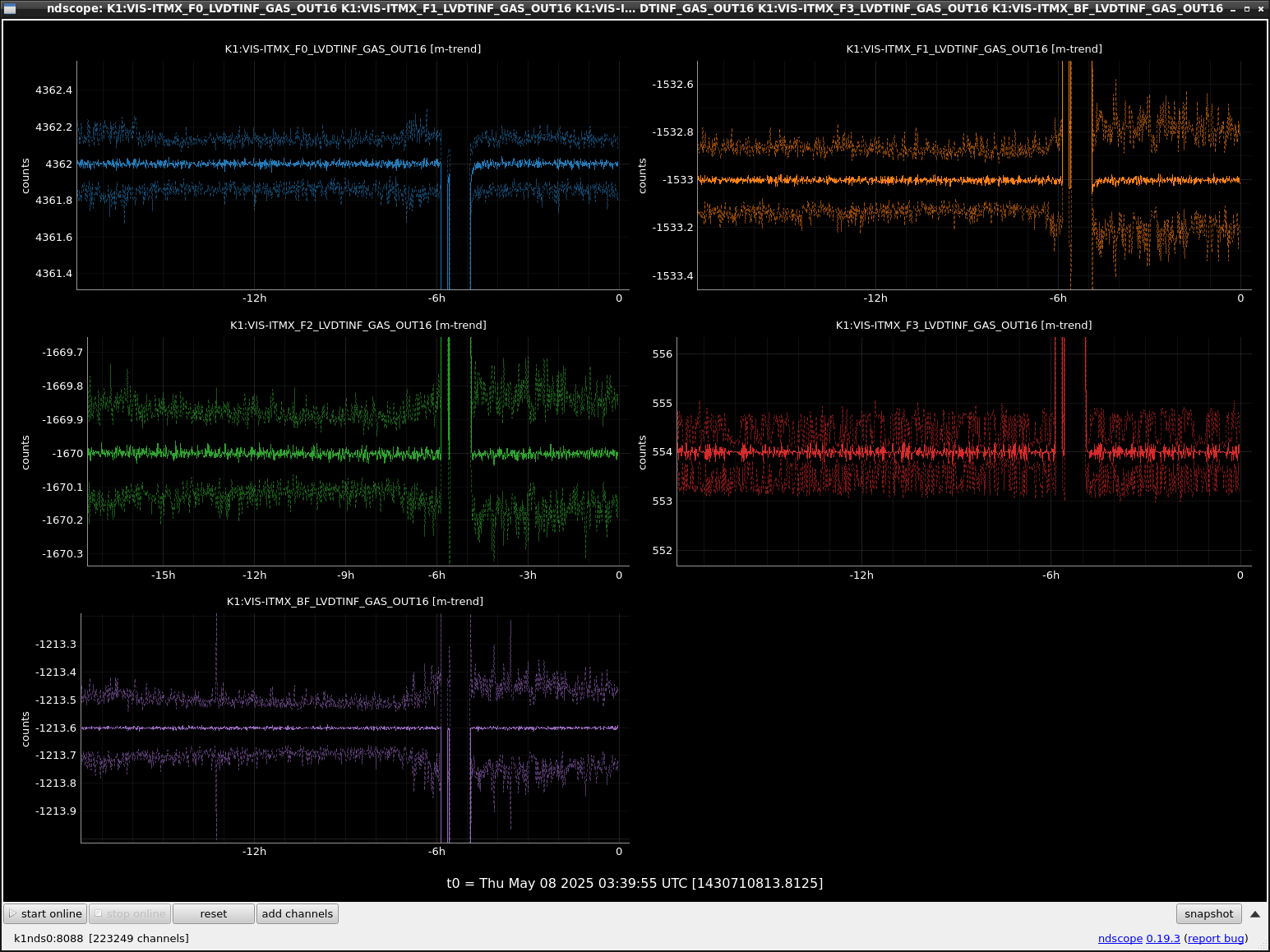
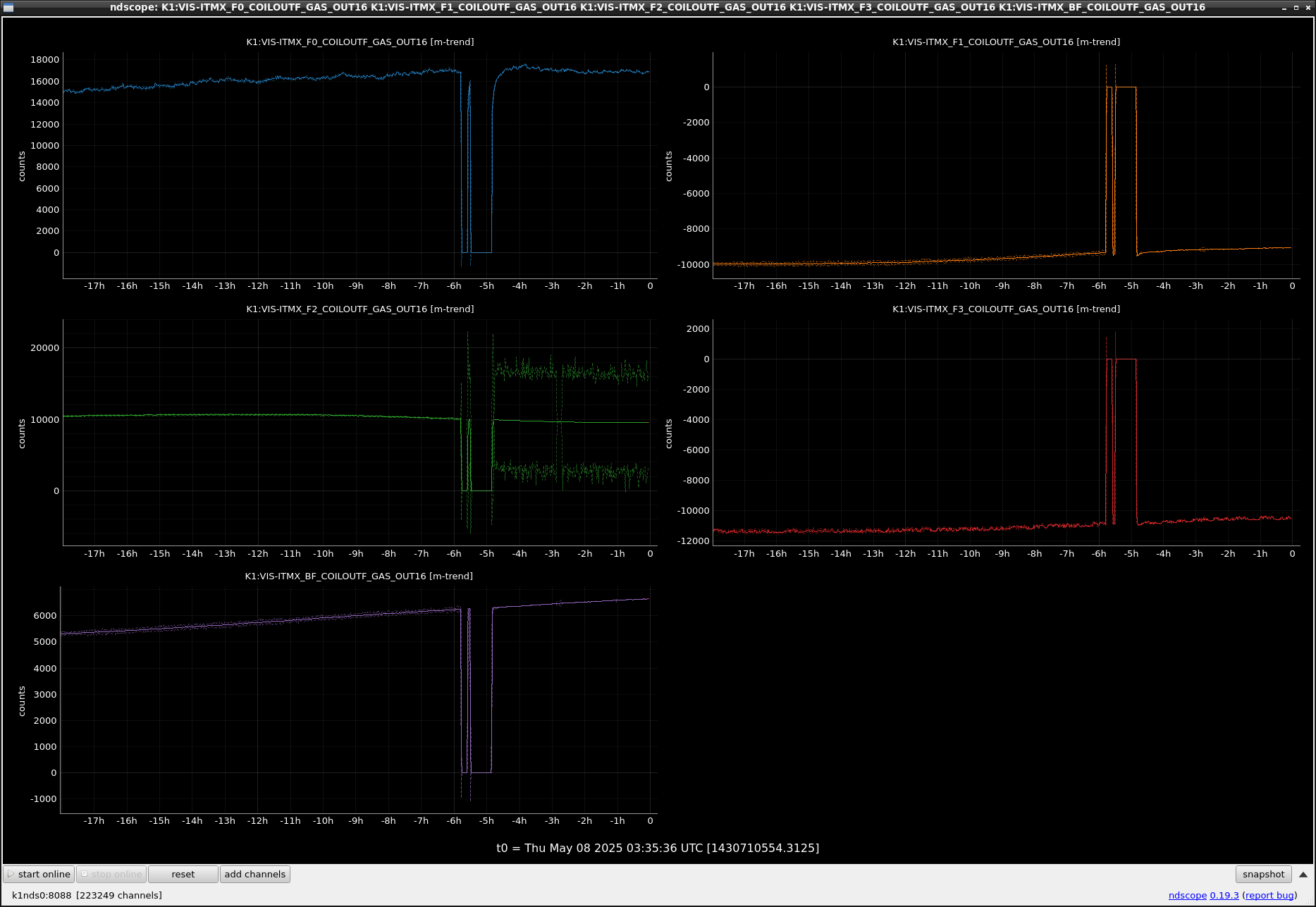
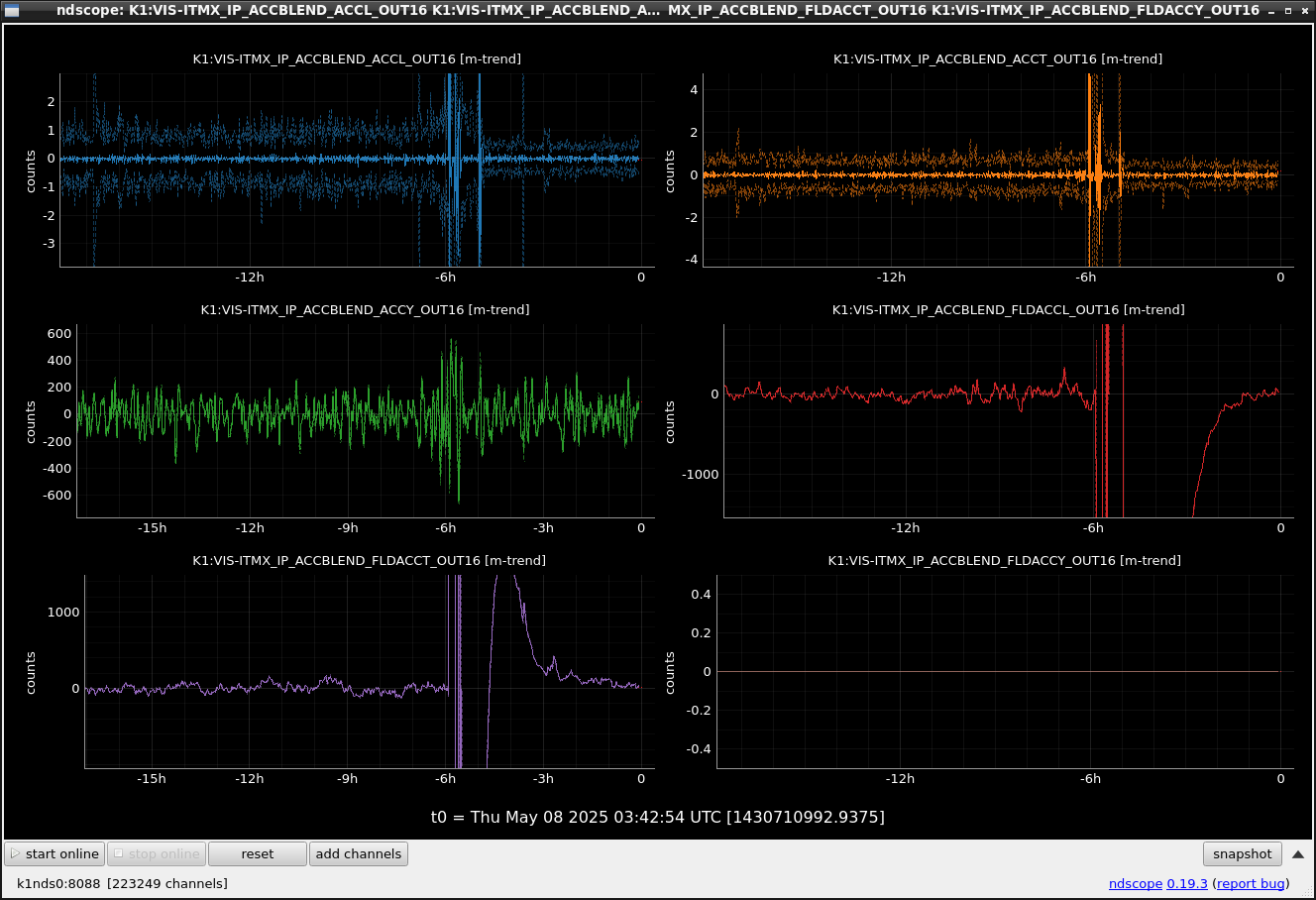
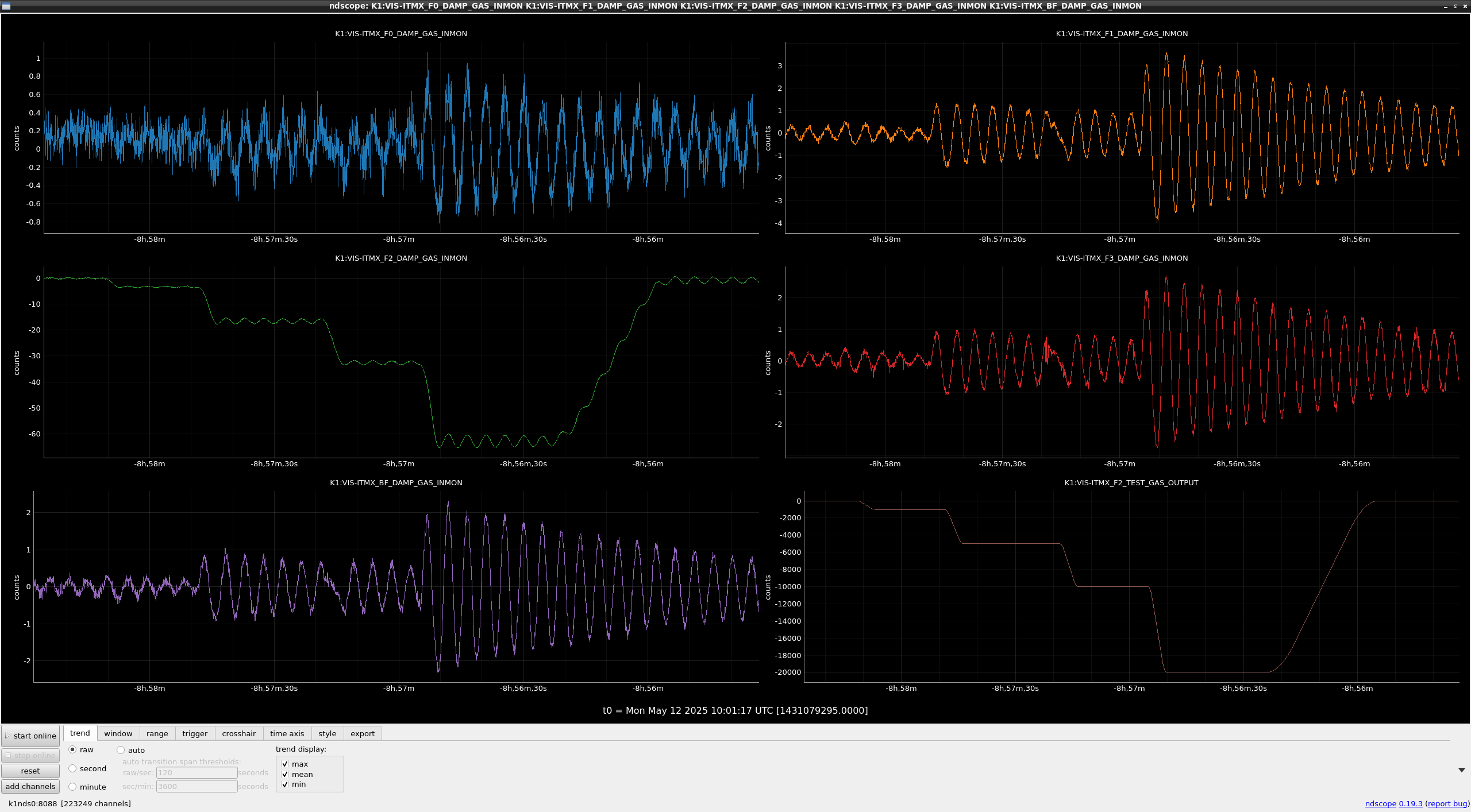
First, we added offsets from F2 GAS filters at TWR_FLOAT state and checked the reaction of the other GAS filters.
If the suspension is touching with the flame below F2 GAS filters, not only F2 GAS filter but also the other GAS filters changes their DC position due to the change of the load.
Figure 1 shows the result and DC position doesn't seem to be changed except for F2 GAS filter, so suspension doesn't seem to touch security flame.
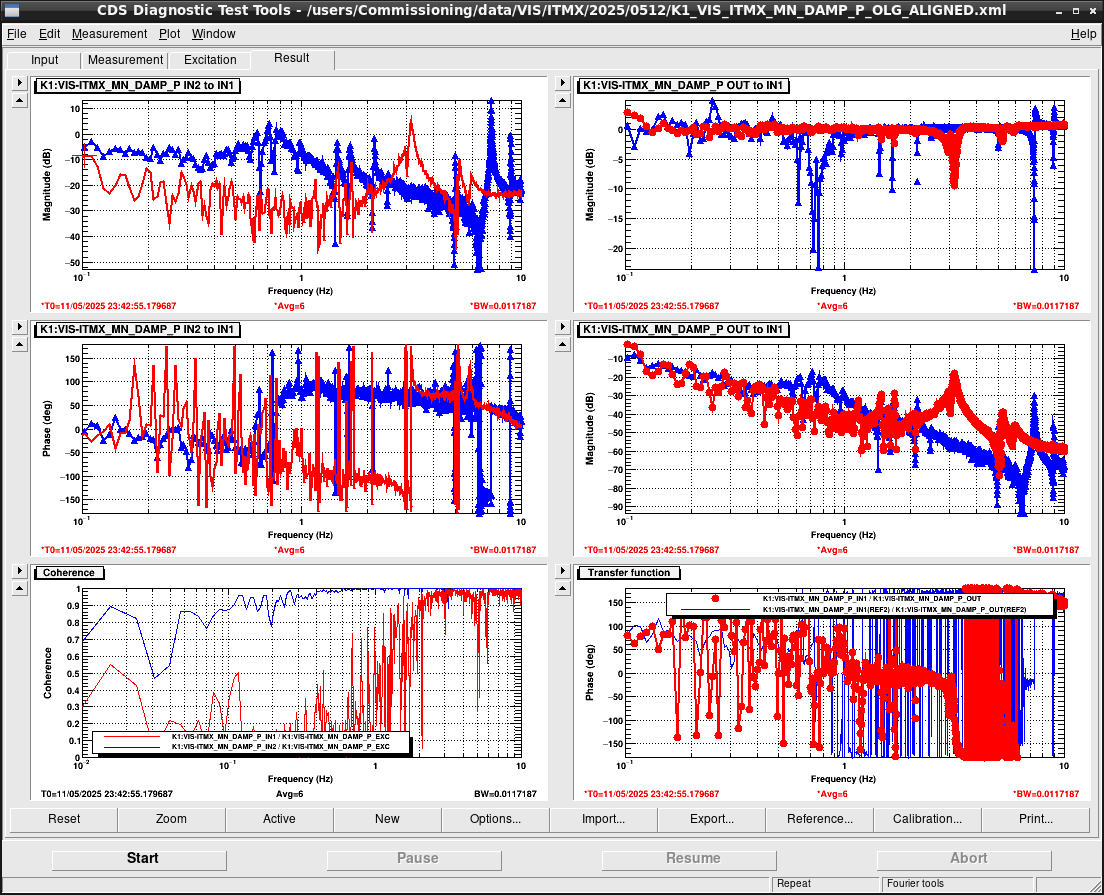
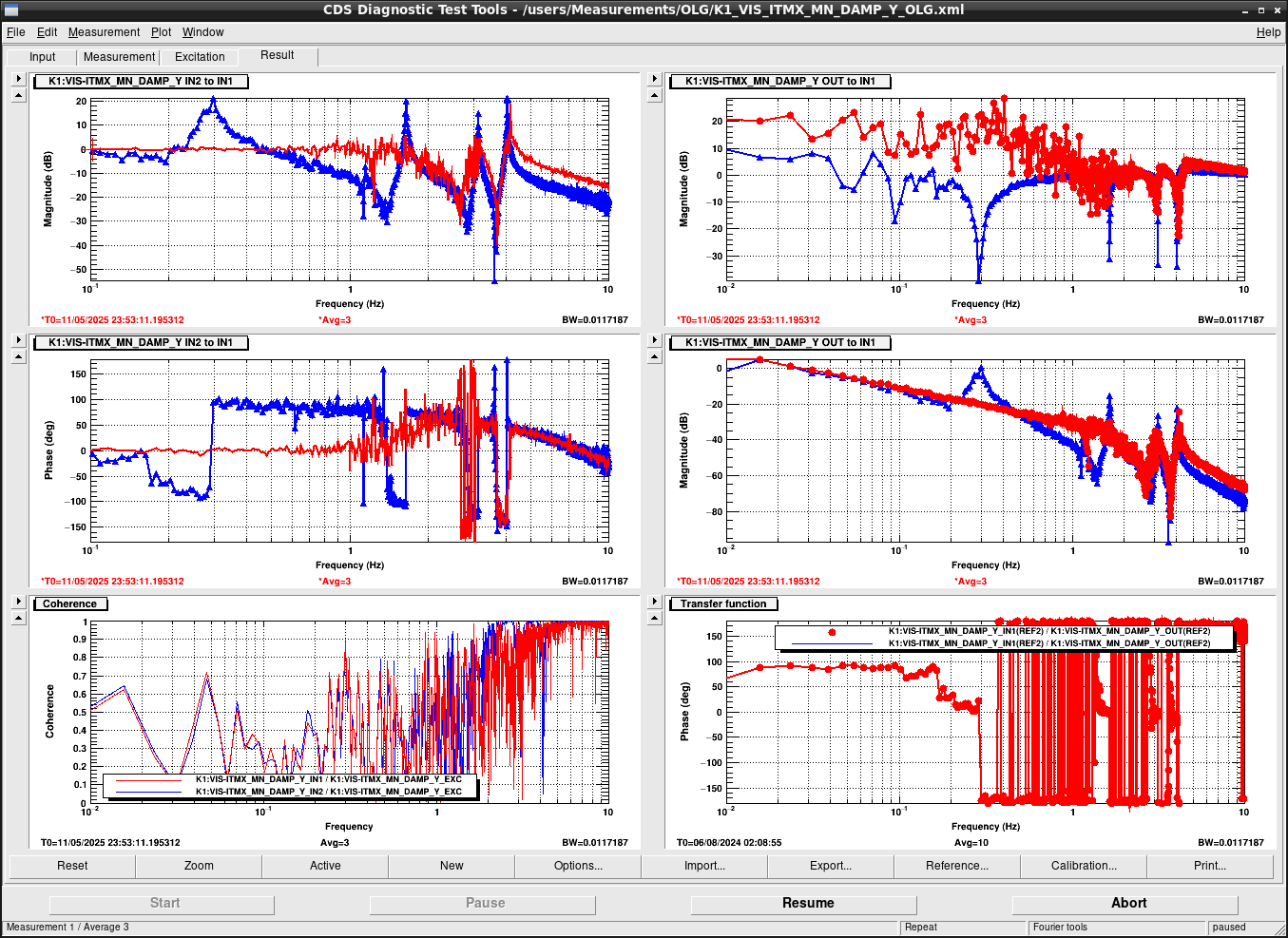
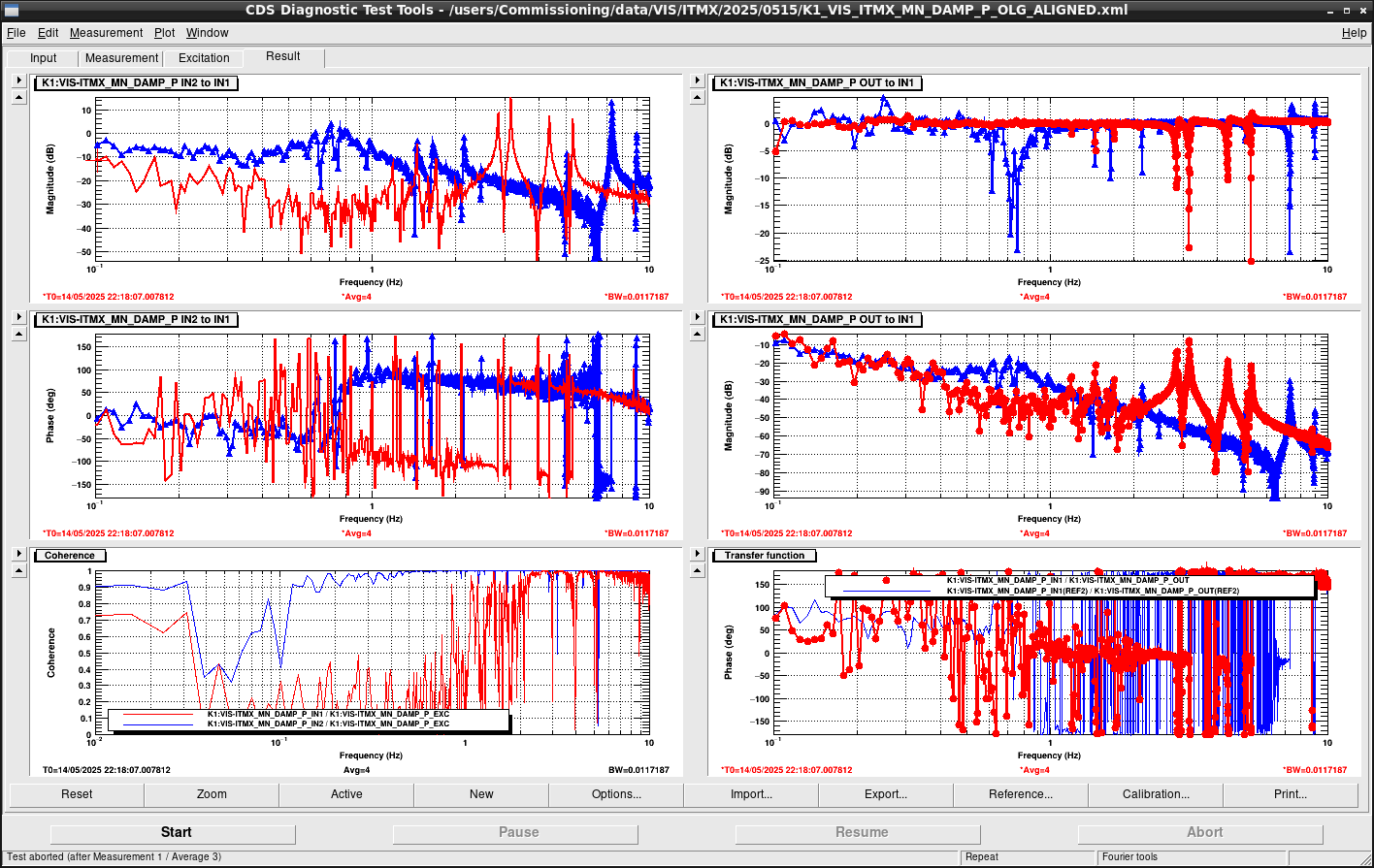
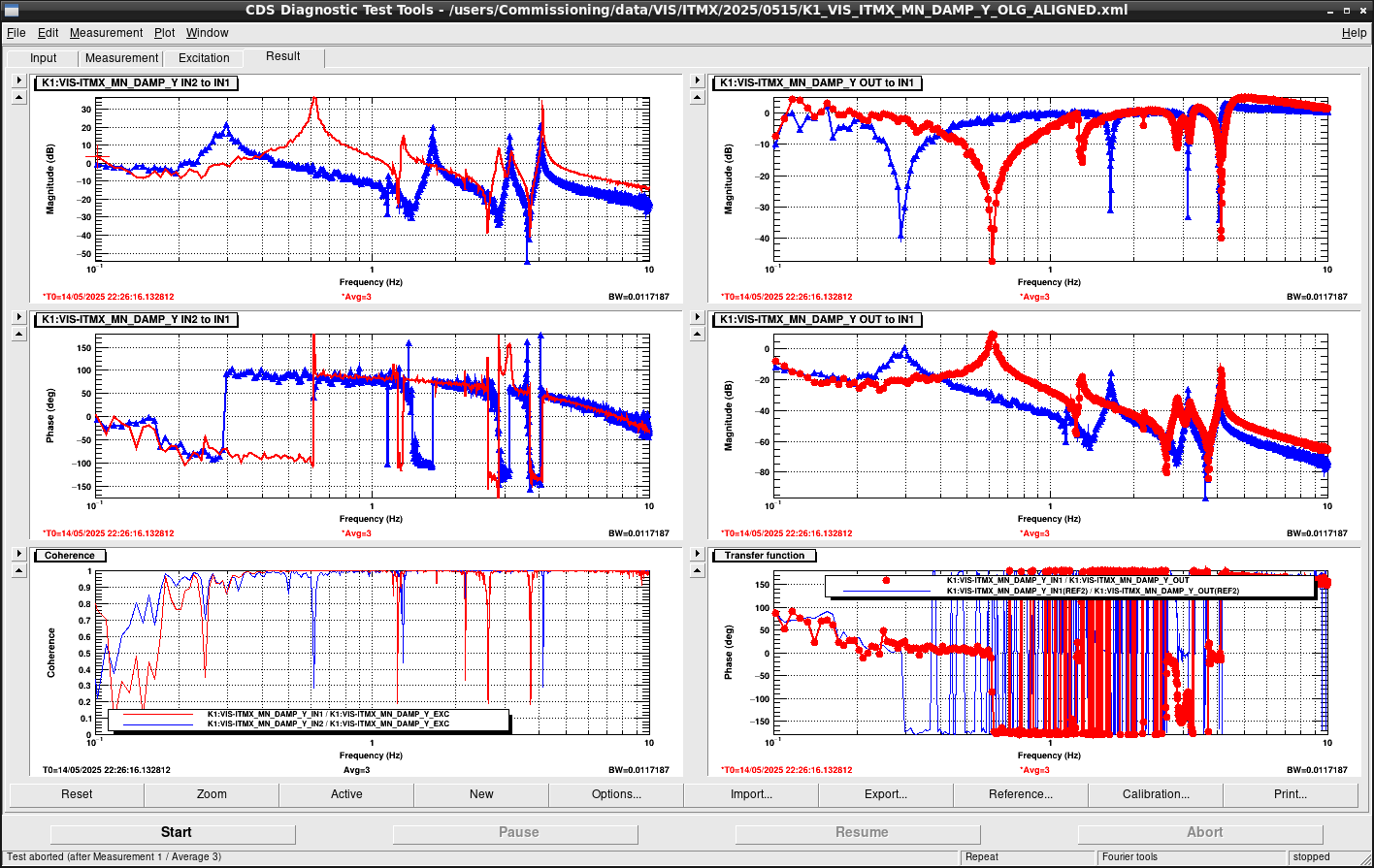
So, the reason of the strange suspension TF is very likely come from the touching/rubbing between main chain and RM chain.
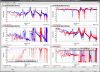
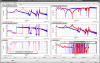
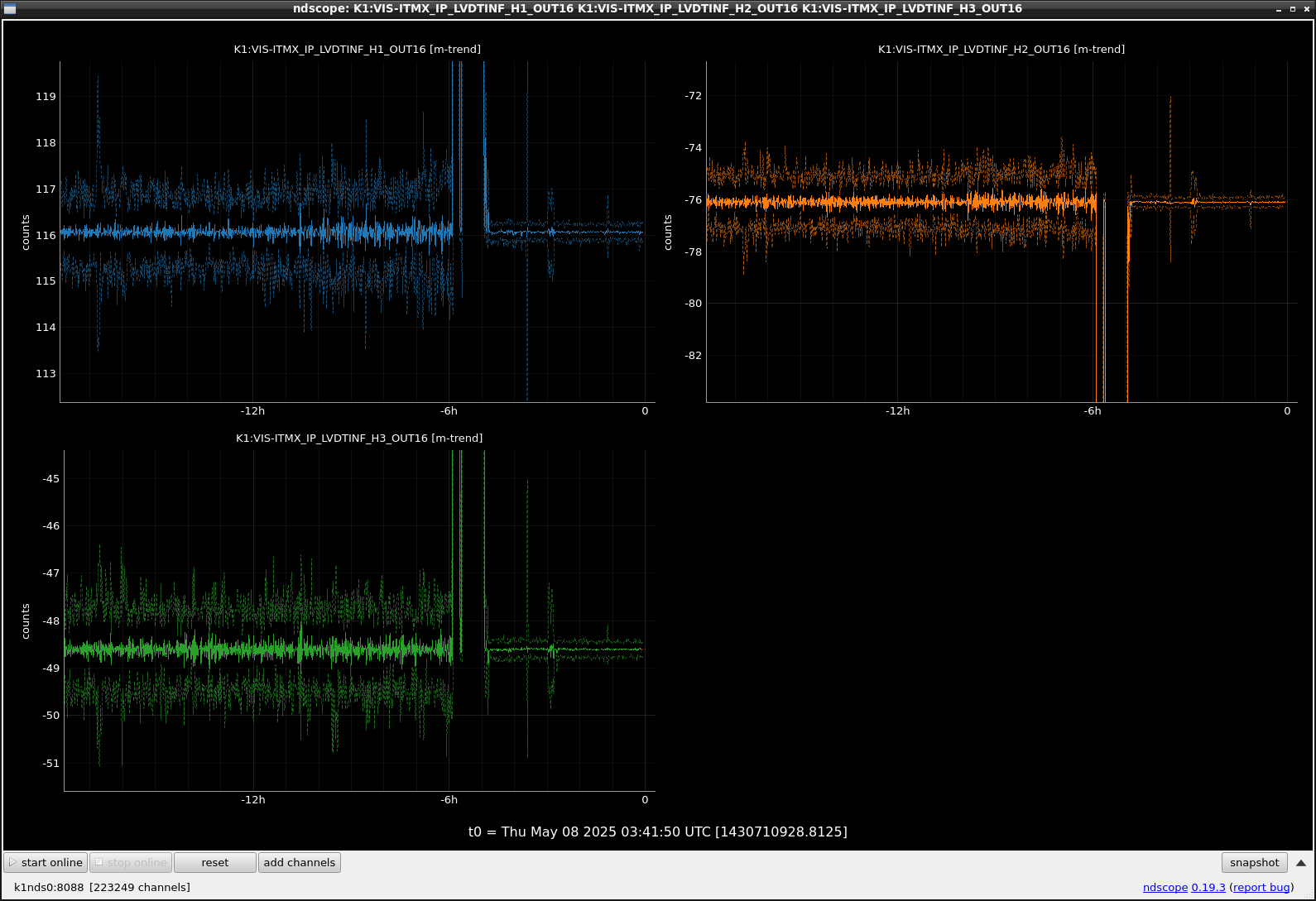
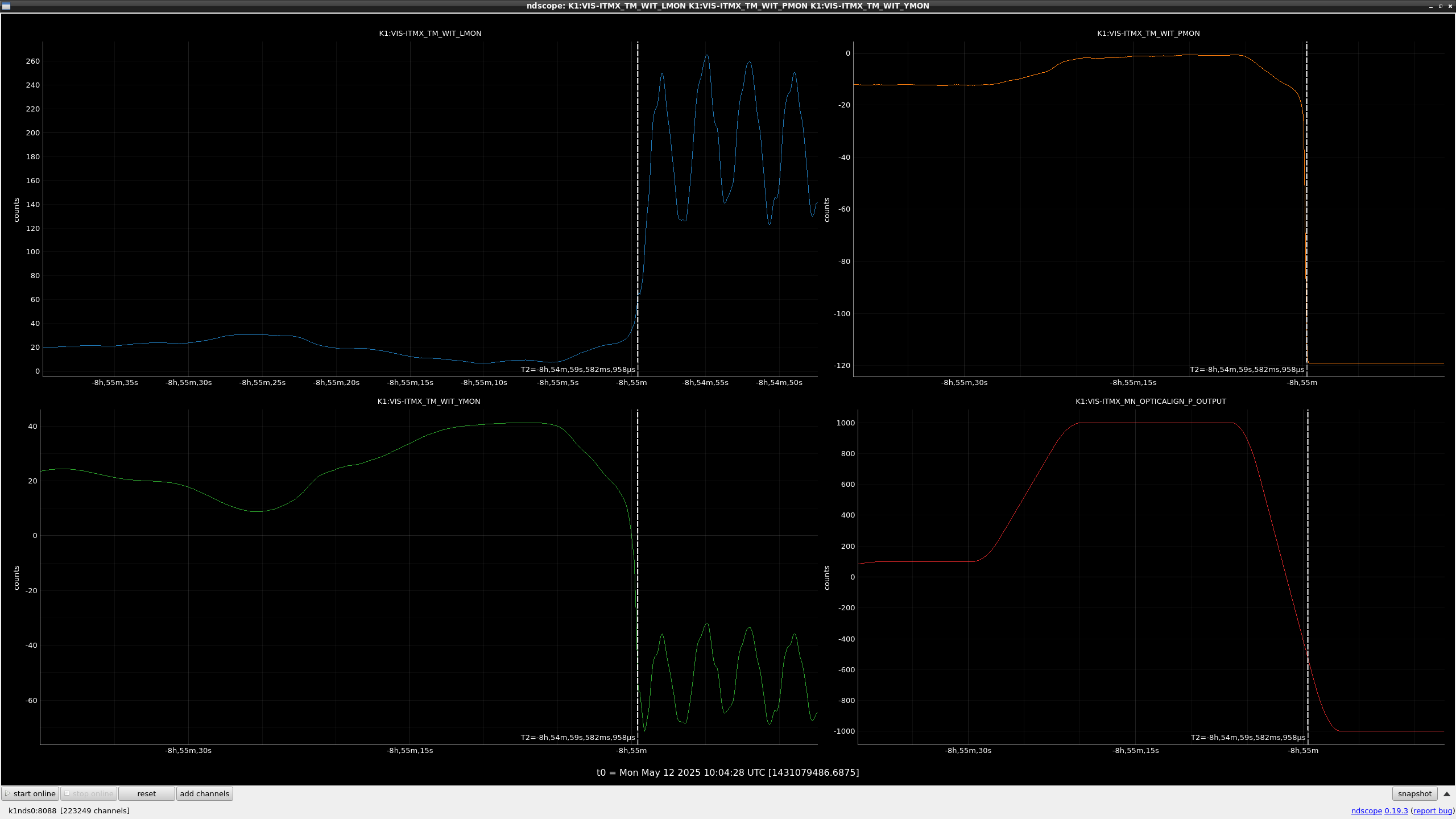
Then, to confirm the touching place precisely, we moved suspension in pitch direction and sudden large jump was observed when moving in -pitch direction (fig2).
This implies that suspension is rubbing between TM chain (TM, IM, and MN) and RM chain (RM, IRM, and MNR).
After confirming somewhere in the payload is rubbing, we performed visual inspection of the payload from the viewport for MN OpLev but no information can be obtained due to very narrow field of view.
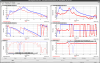
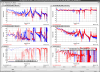
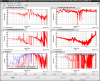
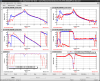
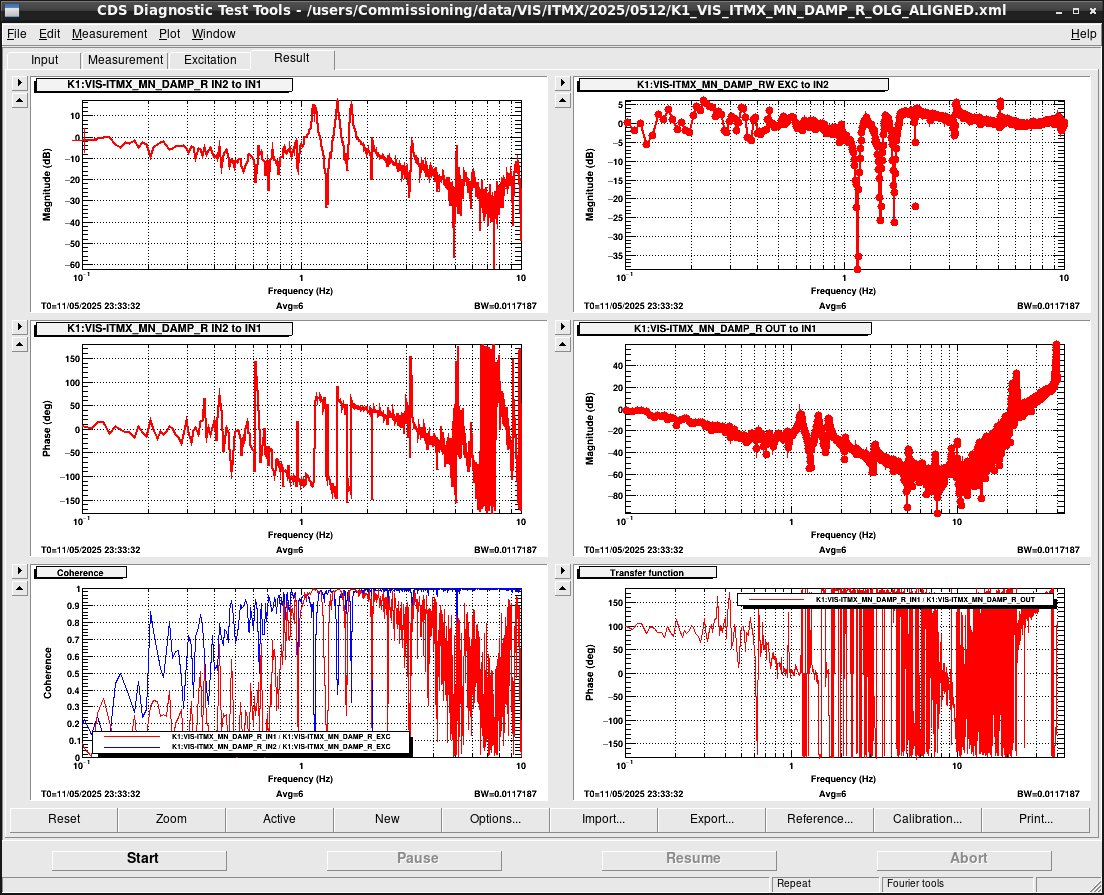
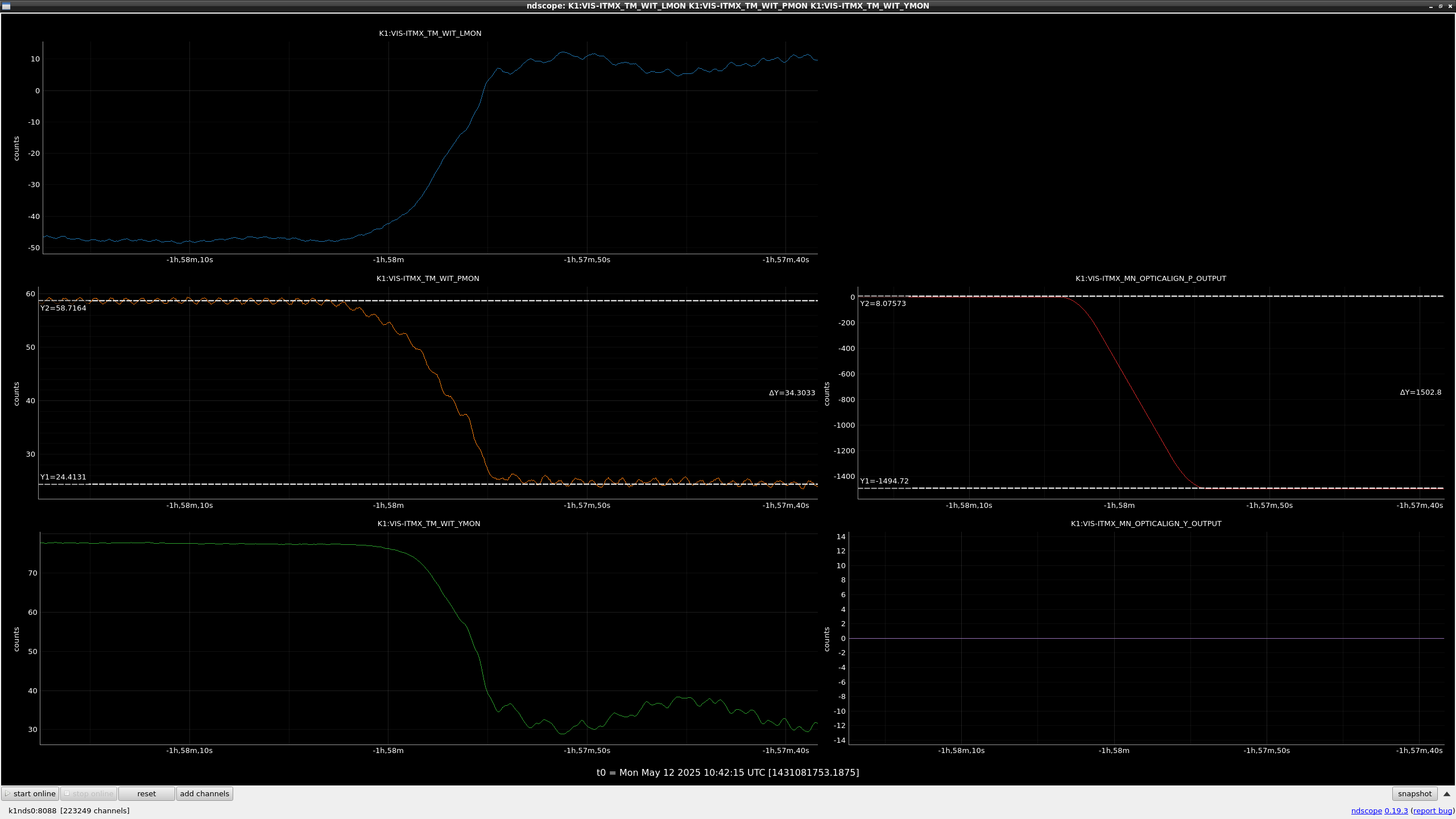
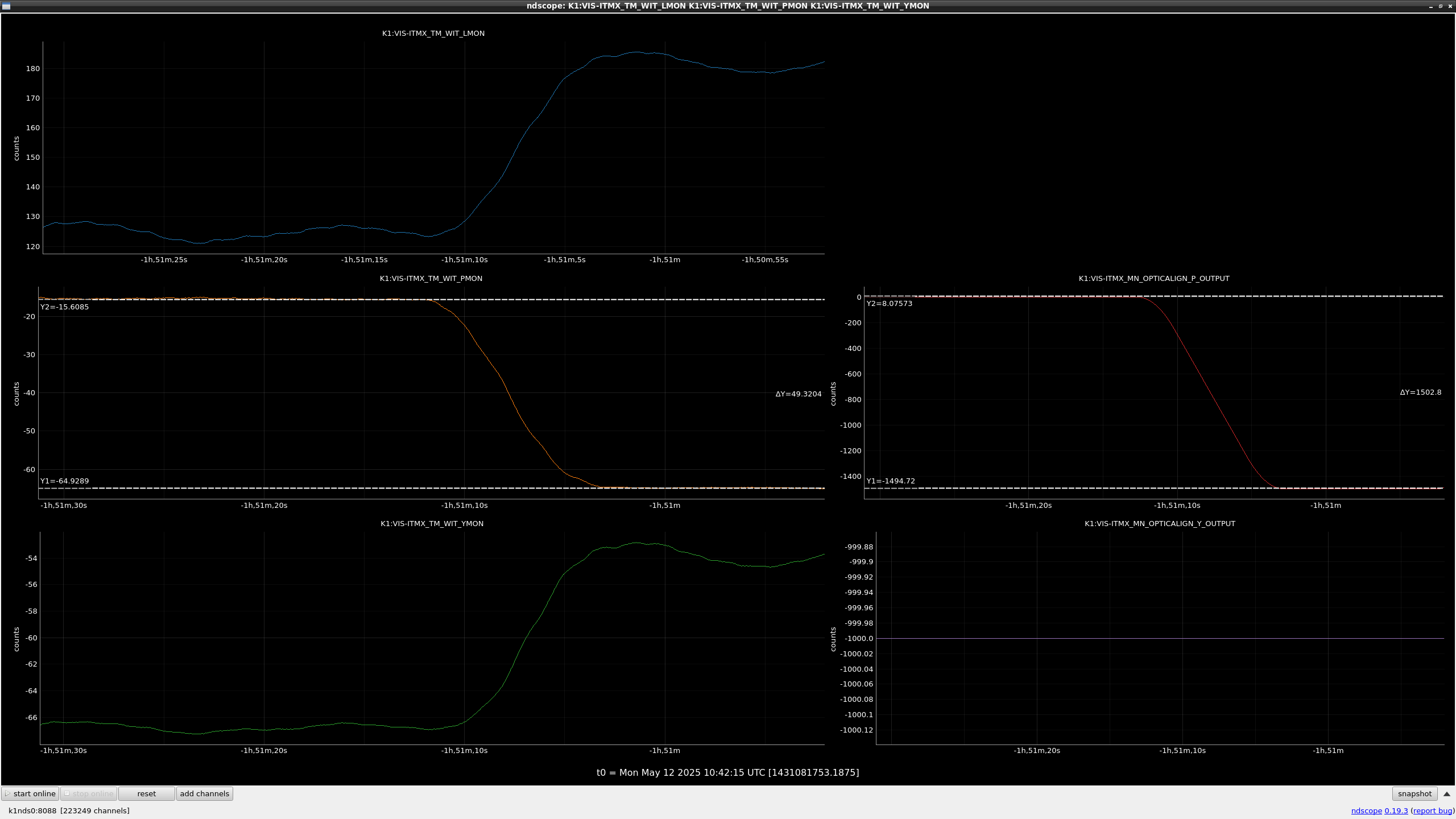
After that, we checked which direction is good for the payload by monitoring the actuator efficiency of pitch with various yaw offset.
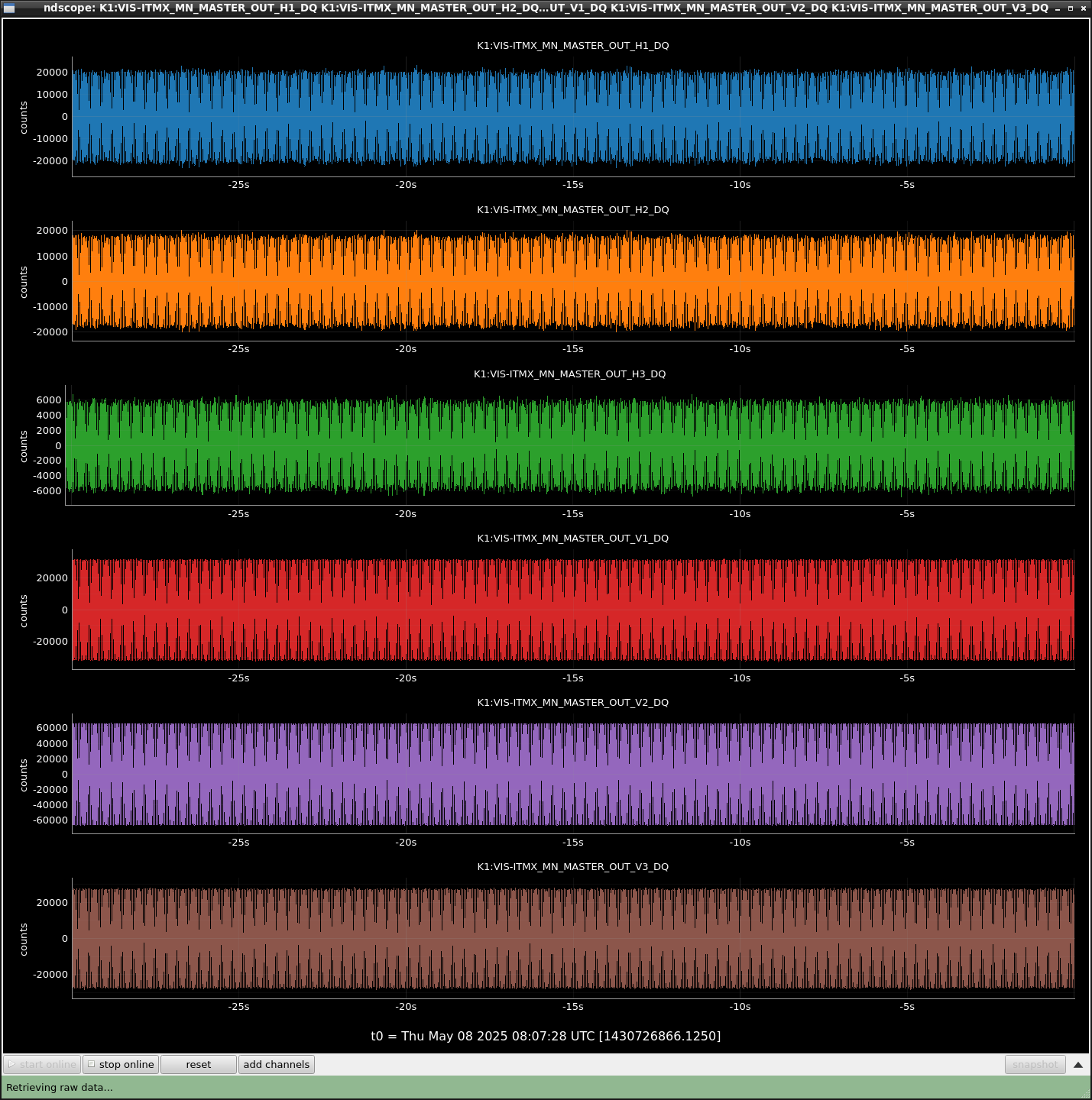
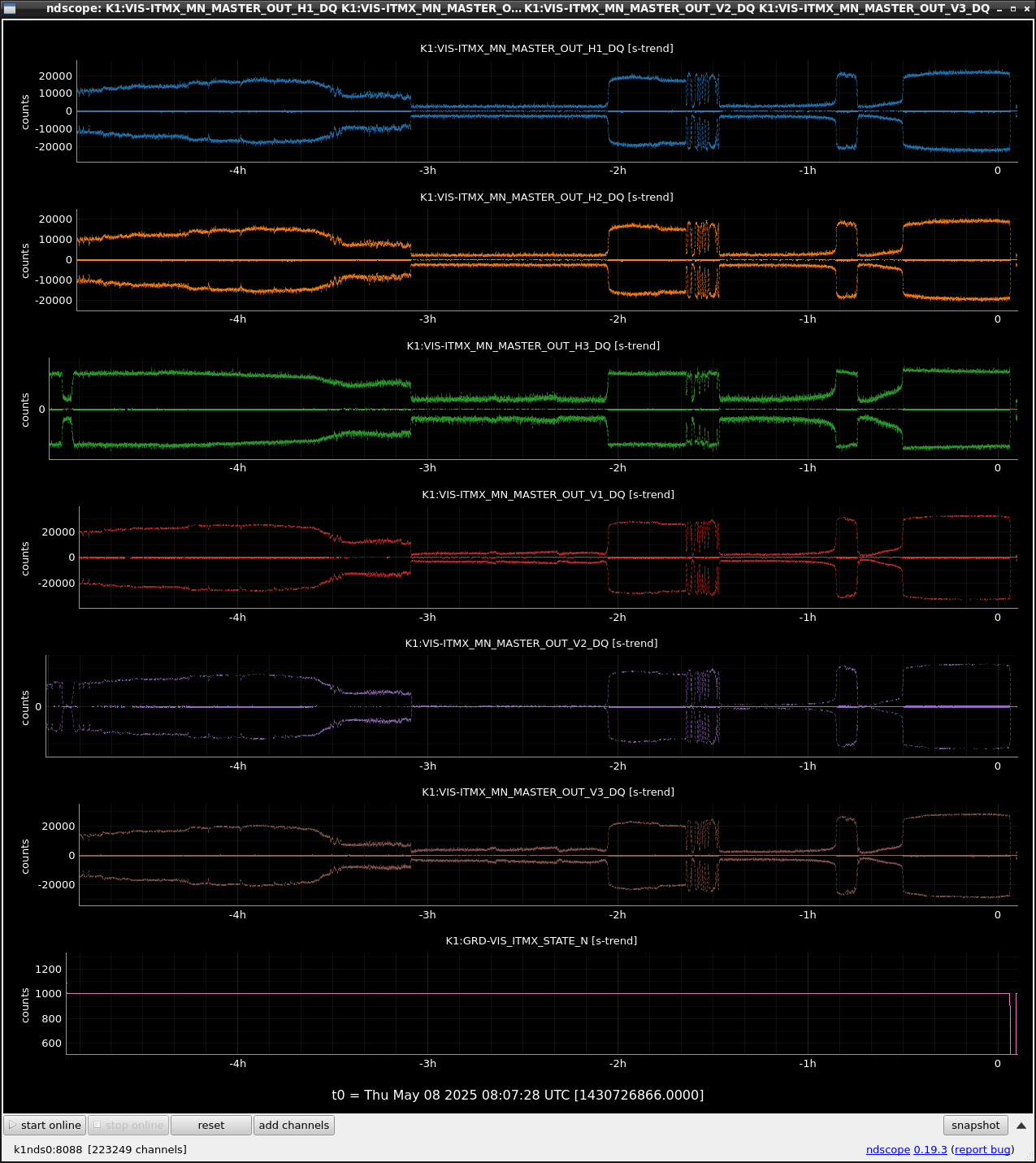
Figure 3 and 4 are one of examples of OpLev signals when adding some offsets.
In both cases, pitch offset was changed by 1500 cnts but TM motions are about 35 and 50 urad in the case of fig3 and fig4, respectively.
So, yaw negative direction and/or pitch negative direction seems to be better in terms of the suspension motions at DC.
For further detailed check, it would be nice to remove the resistance from the actuators to increase the AE and scan various offset of roll/pitch/yaw to confirm if suspensions can be released with some combination of these offsets.


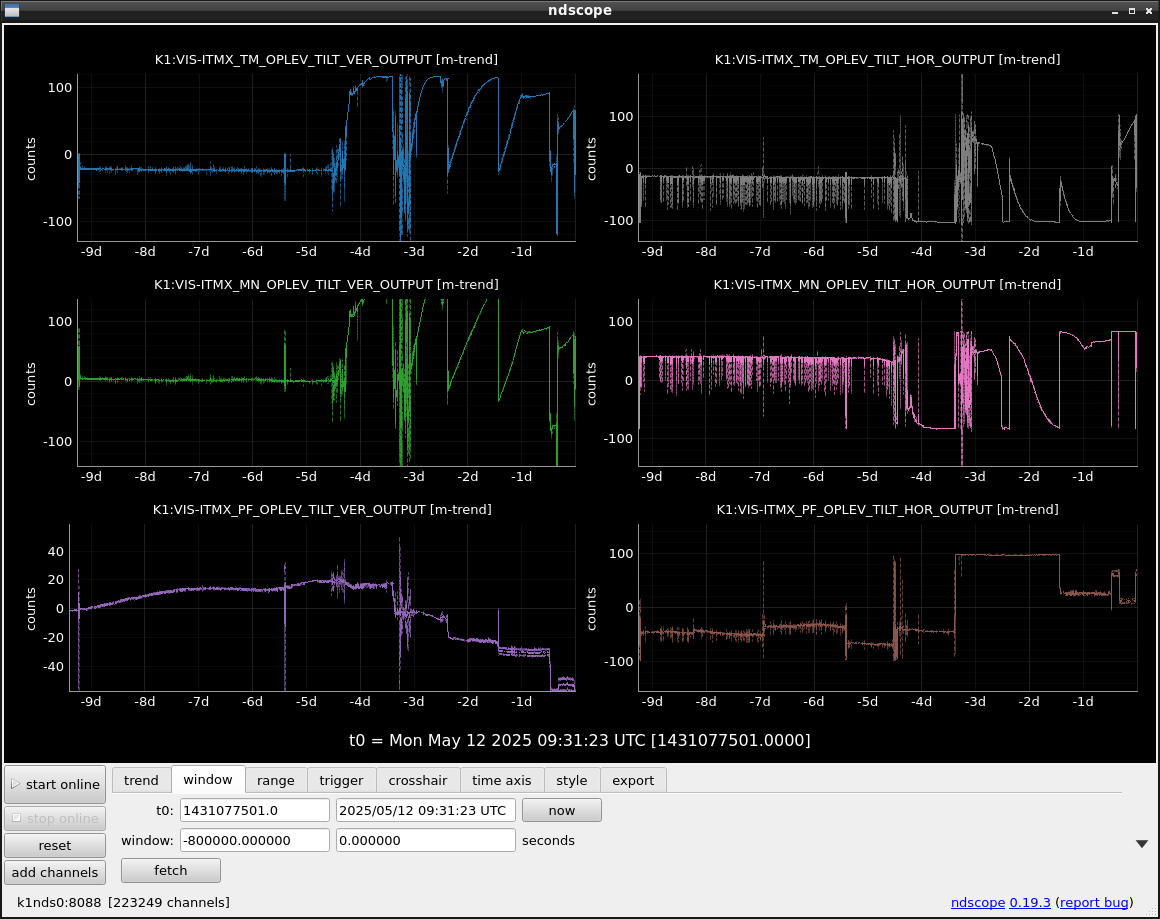
I checked the MN, TM, PF OPLEV TILT VER and HOR. PF/MN/TM OPLEV TILF HOR (not VER) seemed to show strange jumps around -7 days. Around -5.5 days, all OPLEV showed jumps and spike noises.

The bump-like temperature changes in MTR, IMR, and MIR were caused by the temp changes in the 4K REF2 4K HEAD temp around 20 K.

Important information :
ITMX PITCH_HR would be almost edge at plus point (>).
If you need to move more plus direction, please use the PITCH_AR
setting point BF Yaw 3940 -> 3670

This filter was worked well in current situation, so I turned on the L5 NBDAMP filter for ITMX.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}